基于视频识别联动的实弹射击靶机控制方法及系统与流程
本发明涉及图像识别领域,电子控制领域,以及智能分析领域,尤其涉及一种基于视频识别联动的实弹射击靶机控制方法及系统。
背景技术:
1、实弹射击靶机是一种用于实弹射击训练的设备,目前在实弹射击训练、考核和比赛中,对靶机的控制大多采用人工触发、定时触发、遥控触发、条件触发等方式,其中条件触发是通过一些传感设备硬件与靶机遥控器连接后,通过传感器信号来控制遥控器进行靶机动作触发,比如红外对射传感器、人体传感器、声音传感器等。在实战实训过程中,单一固定的触发方式会导致训练效果大打折扣,参训人员可以准确掌握靶机动作规律,降低了实战属性,同时部分传感设备由于识别误差、延迟较大,触发实时性效果也极其糟糕。因此,在实战实训过程中,需要有一种方法,对实弹射击靶机进行实时性控制,并且控制逻辑要基于战场环境动态变化,而不能固定一成不变。
技术实现思路
1、本发明的目的在于针对现有应用场景中技术方案的不足,提供一种基于视频识别联动的实弹射击靶机控制方法及系统。
2、本发明的目的是通过以下技术方案实现的:
3、第一方面,本发明提供一种基于视频识别联动的实弹射击靶机控制方法,包括:
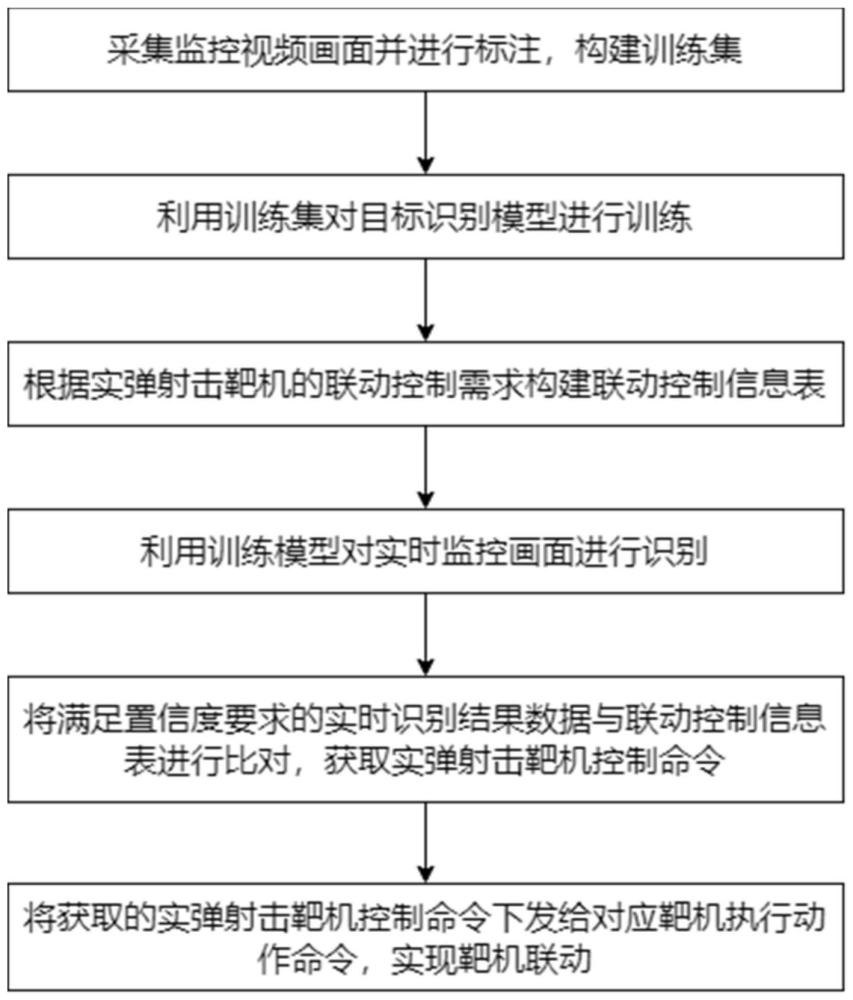
4、在实弹射击训练过程中,利用监控摄像机对固定视角进行视频采集,对视频画面中出现的移动目标进行标签类型及位置信息的标注,得到包含所有标签类型的训练集,利用训练集对目标识别模型进行训练;
5、根据实弹射击靶机的联动控制需求构建联动控制信息表,所述联动控制信息表由识别结果数据与实弹射击靶机控制命令组合而成,一种标签类型及其对应的一个触发区域构成一条识别结果数据,并对应一个实弹射击靶机控制命令,所述实弹射击靶机控制命令包含一条或者多条控制数据,每条控制数据包含靶机id和动作命令;
6、将监控摄像机采集的实时视频画面输入训练好的目标识别模型,得到实时识别结果数据,将满足置信度要求的实时识别结果数据与联动控制信息表中的各条数据进行比对,找出匹配度最大的一条数据,获取该条数据对应的实弹射击靶机控制命令;
7、利用实弹射击靶机控制装置,将获取到的实弹射击靶机控制命令下发给对应靶机执行动作命令,实现靶机联动。
8、进一步地,所述利用监控摄像机对固定视角进行视频采集,具体为:利用实弹射击训练场的各个监控摄像机,分别进行视频采集、数据标注及模型训练,获得针对各个监控摄像机的不同的目标识别模型,训练得到的模型只用于对应的单个监控摄像机,而不是通用同一个模型。
9、进一步地,所述标签类型可自定义,包括:枪支、防爆盾牌、头盔、手部、上臂、腿部、特战队员等;所述位置信息是指标注的移动目标在监控画面中的识别矩形框所在的左上角像素位置及像素大小。
10、进一步地,所述目标识别模型可以采用任何现有的视频识别算法实现的目标识别模型;可根据实际训练需求,随时增加标注的标签类型、调整训练样本,重新训练目标识别模型。
11、进一步地,所述动作命令是指实弹射击靶机可设置的动作命令,包括:显、隐、延迟显、延迟隐、序列显隐、周期显隐、反靶;
12、采用可控步进电机及附属机械传动结构,实现靶面的垂直旋转、正面起倒、侧面起倒;垂直旋转90度、45度、180度,正面起倒90度,侧面起倒45度、90度,均为靶机显动作,和显动作反向运动为靶机隐动作;
13、给定一个时间,靶机在给定时间延迟后产生显动作为延迟显,对应地,靶机在给定时间延迟后产生隐动作为延迟隐;
14、给定一个由延迟时间组成的序列,靶机根据延迟时间序列,分别重复进行延迟显、延迟隐的动作,直到序列完成定义为序列显隐;
15、给定一个显延迟时间和一个隐延迟时间,靶机无限重复延迟显、延迟隐的周期动作定义为周期显隐;
16、不论靶机如何显隐,接收到某命令后,立即将靶面反面转到正对靶机正面的位置并停止一切动作定义为反靶。
17、进一步地,实弹射击靶机控制命令的格式取决于实弹射击靶机控制装置本身可进行的控制动作,实弹射击靶机控制装置负责将动作命令转化为靶机的控制参数并下发给对应靶机进行动作。
18、进一步地,所述将满足置信度要求的实时识别结果数据与联动控制信息表中的各条数据进行比对,找出匹配度最大的一条数据,具体为:
19、利用实时识别到的位置信息,与联动控制信息表中的各条数据包含的触发区域进行空间计算,计算重叠的像素面积,找出最大重叠像素面积并与识别的位置信息的像素面积进行对比,设定占比阀值,将重叠像素面积占自身像素面积比例大于占比阀值的联动控制信息表条目中的动作命令下发到对应的实弹射击靶机,进行相应动作控制。
20、第二方面,本发明提供一种基于视频识别联动的实弹射击靶机控制系统,包括:
21、目标识别模型构建及训练模块:利用监控摄像机对固定视角进行视频采集,对视频画面中出现的移动目标进行标签类型及位置信息的标注,得到包含所有标签类型的训练集,利用训练集对目标识别模型进行训练;
22、联动控制信息表构建模块,用于根据实弹射击靶机的联动控制需求构建联动控制信息表,所述联动控制信息表由识别结果数据与实弹射击靶机控制命令组合而成,一种标签类型及其对应的一个触发区域构成一条识别结果数据,并对应一个实弹射击靶机控制命令,所述实弹射击靶机控制命令包含一条或者多条控制数据,每条控制数据包含靶机id和动作命令;
23、实时实弹射击靶机控制命令获取模块:将监控摄像机采集的实时视频画面输入训练好的目标识别模型,得到实时识别结果数据,将满足置信度要求的实时识别结果数据与联动控制信息表中的各条数据进行比对,找出匹配度最大的一条数据,获取该条数据对应的实弹射击靶机控制命令;
24、靶机联动模块:利用实弹射击靶机控制装置,将获取到的实弹射击靶机控制命令下发给对应靶机执行动作命令,实现靶机联动。
25、第三方面,本发明提供一种基于视频识别联动的实弹射击靶机控制装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述处理器执行所述可执行代码时,用于实现如第一方面所述的基于视频识别联动的实弹射击靶机控制方法。
26、第四方面,本发明提供一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时,用于实现如第一方面所述的基于视频识别联动的实弹射击靶机控制方法。
27、本发明的有益效果为:本发明描述了在实弹射击训练过程中,利用监控摄像机进行图像采集并进行标注的方法,描述了利用标注后数据进行目标识别模型训练的过程,描述了识别结果数据格式定义,描述了联动控制信息表数据格式定义,描述了识别结果数据与联动控制信息表进行重叠计算的方法,描述了利用重叠计算得到的联动控制信息表数据及对应的控制命令对靶机进行联动控制的方法;本发明能够实现基于视频识别的动态实时联动靶机控制。
技术特征:
1.一种基于视频识别联动的实弹射击靶机控制方法,其特征在于,包括:
2.根据权利要求1所述的基于视频识别联动的实弹射击靶机控制方法,其特征在于,所述利用监控摄像机对固定视角进行视频采集,具体为:利用实弹射击训练场的各个监控摄像机,分别进行视频采集、数据标注及模型训练,获得针对各个监控摄像机的不同的目标识别模型,训练得到的模型只用于对应的单个监控摄像机。
3.根据权利要求1所述的基于视频识别联动的实弹射击靶机控制方法,其特征在于,所述标签类型可自定义,包括:枪支、防爆盾牌、头盔、手部、上臂、腿部、特战队员;所述位置信息是指标注的移动目标在监控画面中的识别矩形框所在的左上角像素位置及像素大小。
4.根据权利要求1所述的基于视频识别联动的实弹射击靶机控制方法,其特征在于,根据实际训练需求,增加标注的标签类型、调整训练样本,重新训练目标识别模型。
5.根据权利要求1所述的基于视频识别联动的实弹射击靶机控制方法,其特征在于,所述动作命令是指实弹射击靶机可设置的动作命令,包括:显、隐、延迟显、延迟隐、序列显隐、周期显隐、反靶;
6.根据权利要求1所述的基于视频识别联动的实弹射击靶机控制方法,其特征在于,实弹射击靶机控制命令的格式取决于实弹射击靶机控制装置本身能够进行的控制动作,实弹射击靶机控制装置负责将动作命令转化为靶机的控制参数并下发给对应靶机进行动作。
7.根据权利要求1所述的基于视频识别联动的实弹射击靶机控制方法,其特征在于,所述将满足置信度要求的实时识别结果数据与联动控制信息表中的各条数据进行比对,找出匹配度最大的一条数据,具体为:
8.一种基于视频识别联动的实弹射击靶机控制系统,其特征在于,包括:
9.一种基于视频识别联动的实弹射击靶机控制装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,其特征在于,所述处理器执行所述可执行代码时,用于实现如权利要求1-8中任一项所述的基于视频识别联动的实弹射击靶机控制方法。
10.一种计算机可读存储介质,其上存储有程序,其特征在于,该程序被处理器执行时,用于实现如权利要求1-8中任一项所述的基于视频识别联动的实弹射击靶机控制方法。
技术总结
本发明公开了一种基于视频识别联动的实弹射击靶机控制方法及系统。在实弹射击训练过程中,对采集的视频画面中出现的移动目标进行标签类型及位置信息的标注构建训练集,并利用训练集对目标识别模型进行训练;根据实弹射击靶机的联动控制需求构建联动控制信息表,联动控制信息表由识别结果数据与实弹射击靶机控制命令组合而成;将采集的实时视频画面输入训练好的目标识别模型,得到实时识别结果数据,将实时识别结果数据与联动控制信息表中的各条数据进行比对,找出匹配度最大的数据,获取该条数据对应的实弹射击靶机控制命令;利用实弹射击靶机控制装置,将获取到的实弹射击靶机控制命令下发给对应靶机执行动作命令,实现靶机联动。
技术研发人员:王志鹏,龚亮亮,高能
受保护的技术使用者:杭州掌奇网络科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!