具有减小的电容的外科手术器械、相关设备和相关方法与流程
具有减小的电容的外科手术器械、相关设备和相关方法
[0001]
相关申请的交叉引用
[0002]
本申请要求于2018年7月17日提交的美国临时申请62/699,193的优先权,其全部内容通过引用合并于此。
技术领域
[0003]
本公开的各方面涉及经由致动构件可远程致动的器械,该致动构件将致动力从器械轴的一端处的力驱动传递设备传递至器械轴的另一端处的可移动末端执行器或其他部件。具体地,本公开的各方面涉及外科手术器械以及相关的方法和系统。
背景技术:
[0004]
可以在手术部位使用各种外科手术器械来进行外科手术程序。外科手术器械可以是通电的(例如,通过施加电流来执行电外科手术程序),或者可以是非通电的(例如,使用机械致动来夹持或切割组织)。这样的外科手术器械可以包括但不限于被配置用于手动、腹腔镜使用或作为远程操作的外科手术系统的一部分的微创外科手术器械。远程操作的计算机辅助外科手术系统的一个示例(例如,提供远程呈现的机器人系统)是由加利福尼亚州桑尼维尔市的直观外科手术操作公司制造的“外科手术系统”。
[0005]
在某些情况下,手术部位使用多种外科手术器械。这样的外科手术器械,无论是通电的(即“热”)还是非通电的(即“冷”),都可以包括导电部件,包括例如由导电材料(例如金属或金属合金)制成的部件。这些外科手术器械中的许多还包括致动构件,例如电缆、杆等,或其组合,该组合被配置为将来自可操作地耦合在外科手术器械轴的近端区域处的力传递设备的张力和/或压力传递到可操作地耦合在外科手术器械轴的远端区域处的可致动部件(诸如末端执行器或关节腕机构)。这样的可致动部件也可以是导电的和/或由导电材料(例如金属或金属合金)制成。如果通电的或“热”的电外科手术器械使用此类部件靠近或接触的导电的非通电的或“冷”的器械,则存在将电能从通电的器械传输到非通电的器械的可能性。例如,“热”器械可能意外或有意与“冷”器械接触,导致电能由“冷”器械的导电部件传导。此外,紧邻“冷”器械使用的“热”器械可以感应“冷”器械中的电能。由于给冷器械的一个部件通电,冷器械的附加部件可能被通电,例如通过电容耦合。例如,如果“冷”器械的致动杆或电缆由意外地或有意与“冷”器械的末端执行器接触的“热”器械而通电,则现在通电的致动杆或电缆可以通过器械的其他导电部分(例如,包括轴、腕结构或器械的其他暴露部分)中的电容耦合感应电能。
[0006]
此外,即使是其他通电的器械也容易受到来自通电器械的这种不希望的电效应的影响。例如,单极器械使用显著高于双极器械的电压。紧邻单极器械的双极器械可能受到来自单极器械的电能的影响,导致双极器械的导电部分内的不希望的电容耦合。为了本公开的目的,下文中的“冷”器械是指被另一通电的器械有意或无意地通电而不是从能源直接通电的任何器械。
[0007]
虽然绝缘护套可以提供一定程度的保护,以防止电能从内部部件传导到暴露的导
电部件(例如器械轴和腕部结构),但希望进一步减轻或防止在器械内的导电部件和器械的暴露导电部件之间电容耦合的可能性。
[0008]
需要在非通电的器械(即不是电外科器械的器械)中提供电绝缘,以防止或减轻可能由于其靠近通电的器械而暂时受到电能的影响的这样的器械的各部分之间的电容耦合。还需要在不损害器械的耐用性或可靠性的情况下防止或减轻外科手术器械的各部分之间的电容耦合。需要继续使用例如用于致动构件的相对坚固的金属或金属合金材料,同时防止或减轻外科手术器械中的不期望的导电路径。
技术实现要素:
[0009]
本公开的示例性实施例可以解决上述问题中的一个或多个和/或可以证明上述期望特征中的一个或多个。根据以下描述,其他特征和/或优点将变得显而易见。
[0010]
根据至少一个示例性实施例,一种用于沿器械的轴传递来自驱动机构的力的致动构件包括第一导电长度部分、第二导电长度部分和设置在第一导电长度部分和第二导电长度部分之间并连接第一导电长度部分和第二导电长度部分的电绝缘长度部分。
[0011]
根据至少另一个示例性实施例,一种器械包括:具有近端和远端的轴;耦合至轴的远端并在远离轴的远端的方向上延伸的末端执行器;耦合到轴的近端区域的力传递机构,以及致动构件,该致动构件延伸穿过轴,在一端处可操作地耦合到力传递机构,并且在相对端处可操作地耦合到器械的可移动部件。致动构件包括第一导电长度部分、第二导电长度部分和设置在第一导电长度部分和第二导电长度部分之间并连接第一导电长度部分和第二导电长度部分的电绝缘长度部分。
[0012]
根据又一个示例性实施例,一种减小致动构件的导电长度的方法,该致动构件用于将致动力从驱动机构传递到外科手术器械的末端执行器,该方法包括形成具有导电材料的致动构件的第一近端部分,使用导电材料形成致动构件的第一远端部分,以及在第一近端部分和第一远端部分之间提供第一电绝缘材料,其中第一近端部分的近端被配置为可操作地耦合到驱动机构,其中第一远端部分的远端被配置为可操作地耦合至末端执行器。第一电绝缘材料使第一近端部分与第一远端部分中的电能电绝缘。
[0013]
根据又一个示例性实施例,一种器械包括:具有近端和远端的多个细长构件、耦合至多个细长构件中的至少一个的远端的末端执行器,和耦合至多个细长构件中的至少一个的近端区域的力传递机构,该多个细长构件至少包括轴、延伸穿过轴的致动构件和延伸穿过轴并容纳致动构件的长度的至少一部分的管构件,其中多个细长构件中的至少一个包括第一导电长度部分、第二导电长度部分和设置在第一导电长度部分和第二导电长度部分之间并连接第一导电长度部分和第二导电长度部分的电绝缘长度部分。
[0014]
附加的目的、特征和/或优点将在下面的描述中部分地阐述,并且部分地将从描述中变得显而易见,或者可以通过实践本公开和/或权利要求而获知。这些目的和优点中的至少一些可以通过所附权利要求中特别指出的要素和组合来实现和获得。
[0015]
应该理解,前面的概述和下面的详细描述都只是示例性和解释性的,并不限制权利要求;相反,权利要求应享有其全部范围的权利,包括等同物。
附图说明
[0016]
可以从下面的详细描述中单独地或与附图一起来理解本公开。包括附图以提供对本公开的进一步理解,并且附图被并入本说明书中并构成本说明书的一部分。附图图示了本教导的一个或多个示例性实施例,并且与说明书一起用于解释某些原理和操作。
[0017]
图1是外科手术器械的示例性实施例的透视图。
[0018]
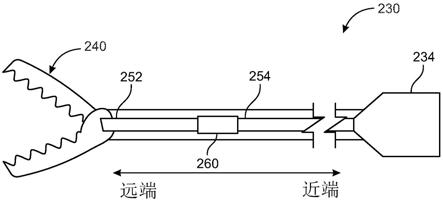
图2是根据本公开的包括具有电绝缘部分的致动构件的外科手术器械的示例性实施例的剖视图。
[0019]
图3是根据本公开的包括具有电绝缘部分的致动构件的外科手术器械的示例性实施例的局部详细剖视图。
[0020]
图4是根据本公开的具有电绝缘部分的致动构件的示例性实施例的剖面示意图。
[0021]
图5是根据本公开的包括具有电绝缘部分的致动构件的外科手术器械的另一示例性实施例的局部详细剖视图。
[0022]
图6a和图6b是根据本公开的具有电绝缘部分的致动构件的示例性实施例的剖面示意图。
[0023]
图7是包括多个连结部分的外科手术器械的示例性实施例的透视图。
[0024]
图8是根据本公开的包括具有电绝缘部分的轴的外科手术器械的示例性实施例的透视示意图。
具体实施方式
[0025]
本公开考虑外科手术器械和相关设备的各种示例性实施例,该相关设备被配置用于在由导电材料制成的外科手术器械的部件的部分之间进行电隔离。例如,根据本公开的示例性实施例,外科手术器械可以包括致动构件,该致动构件包括导电材料(例如,金属和/或金属合金),并且设置有电绝缘材料,以在器械的导电材料部分之间的导电路径中提供绝缘“中断”。在一些示例性实施例中,致动构件至少包括两个导电部分和设置在两个导电部分之间的电绝缘部分。在其他实施例中,电绝缘部分可以沿着一个或多个导电部分的远端与一个或多个导电部分的近端之间的一个或多个导电部分的长度设置在任何地方。
[0026]
因此,本文公开的示例性实施例提供一种致动构件,其能够实现致动构件的远端和近端之间的电隔离。而且,根据本公开的各种示例性实施例的致动构件具有从例如致动构件的一端到沿着致动构件的长度的发生电绝缘“中断”的部分的相对短的导电路径长度。因为在外科手术器械的其他导电部件(例如器械轴,包括任何关节机构)中可以感应的电容耦合的量与致动构件的导电长度成比例,所以这些示例性致动构件的较短导电路径减少或减轻电容耦合效应。这种较短的导电路径最小化(或消除)致动构件与外科手术器械的其他导电部件或器械外部的区域之间的意外的导电。
[0027]
在各种示例性实施例中,可以在除致动构件之外的器械的部件中提供电绝缘“中断”。例如,器械轴可以具有沿着器械轴的长度在不同部分处提供的一个或多个“中断”。由于电容耦合的量进一步与器械轴本身的长度成比例,因此将轴的导电长度减少到两个或多个导电部分(彼此电绝缘)可以进一步减少由器械的其他通电部件(例如通电的致动构件)在器械轴内部引起的电容耦合效应。
[0028]
此外,由于各种原因,可能难以电隔离这种外科手术器械的不同部分。例如,诸如
夹子、钳子、夹持器、剪刀等的外科手术器械通常被配置为传递相对高的力以执行期望的外科手术。致动构件必须能够沿着致动构件的整个长度将这样的致动力从力传递机构传递到外科手术器械的末端执行器或其他可移动部件。为了承受这样的力并提供耐用性,此类外科手术工具的致动构件可以基于诸如屈服强度、韧性、硬度等材料特性,由金属或金属合金(例如不锈钢、钛合金、铝合金等)制成。然而,此类材料通常具有相对较高的导电性,这增加了前述的电容耦合效应。因此,本文描述的各种示例性实施例提供了沿着致动构件的长度设置的电绝缘材料,其可以维持致动构件的耐用性,同时在单个导电材料致动构件(例如,金属或金属合金致动构件)的尺寸顺序上保持相对小的外部尺寸。换句话说,本文所述的示例性实施例允许在致动构件中的力传递(抗压强度和抗拉强度),该力传递在致动构件的近侧部分与远侧部分之间提供一定程度的电绝缘。
[0029]
本文描述的示例性实施例可以例如与诸如在以下美国专利申请中描述的那些系统的远程操作的计算机辅助外科手术系统(有时被称为机器人外科手术系统)一起使用,例如:于2013年12月5日公开的,题为“multi-port surgical robotic system architecture”的美国专利申请us 2013/0325033a1、于2013年12月5日公开的,题为“redundant axis and degree of freedom for hardware-constrained remote center robotic manipulator”的美国专利申请us2013/0325031a1,以及于2014年10月7日公开的,题为“surgical system instrument mounting”的美国专利申请8,852,208,上述申请中的每个通过整体引用合并于此。此外,本文所述的示例性实施例可以例如与“外科手术系统”(例如,全部由直观外科手术操作公司商业化的,都具有或不具有“单部位单孔外科手术技术”的“vinci外科手术系统”或“vinci外科手术系统”)一起使用。尽管关于与远程操作的外科手术系统的患者侧推车一起使用的外科手术器械讨论了本文描述的各种示例性实施例,但本公开不限于与远程操作的外科手术系统的外科手术器械一起使用。例如,本文描述的致动构件的各种示例性实施例可以可选地与其他腹腔镜外科手术器械(包括手持式、手动外科手术器械)或与其他外科手术应用结合使用。
[0030]
图1示出示例性外科手术器械130的透视示意图。外科手术器械130包括轴132,该轴132具有定位在其远端区域的末端执行器140。(本文所使用的远侧方向和近侧方向是相对于如图1中的标记所示的器械限定的)。在示例性实施例中,末端执行器140包括被配置为执行例如抓握功能的钳口。然而,本领域普通技术人员将理解,可以想到其他末端执行器配置,例如用作钳子、夹持器、针驱动器、手术刀、剪刀、吻合器、夹子、烧灼工具、钩子、刀片等的那些末端执行器配置。轴132可以可选地包括腕部144,该腕部144使得末端执行器140能够在一个或多个方向上铰接。例如,如本文进一步描述的,力传递机构134可以产生经由致动构件150传递的致动力,以致动或铰接腕部144、末端执行器140或外科手术器械130的其他部分。轴132、一个或多个可选的腕机构144和末端执行器140的直径通常根据打算与外科手术器械130一起使用的套管或其他引导结构的尺寸,并取决于正在执行的外科手术来选择。在各种示例性实施例中,轴132和/或腕机构144的直径范围为约4mm至约10mm,例如,约5mm至约8mm。
[0031]
致动构件150可以被定位在轴132的中心孔内。致动构件150被配置为传递在力传递机构134处所产生的致动力。例如,致动构件150可以包括能够传递张力(即拉力)和/或压力(即推力)以致动外科手术器械130的其他部件(例如末端执行器140或腕部144)的压缩杆
状构件或电缆构件。此外,致动构件150可以包括在致动构件150的近端处的第一部件,该第一部件被配置成与力传递机构134相互作用,例如,与力传递机构134的驱动机构相互作用。驱动机构递送沿致动构件150被传递的致动力到设置在外科手术器械130的远端区域处的末端执行器或其他可移动部件(例如腕部144)。因此,致动构件150可以进一步包括朝向致动构件150的远端的第二部件,该第二部件被配置为例如与末端执行器140、腕部144等相互作用。
[0032]
此外,如本文所述,致动构件可以包括导电材料(例如,金属和/或金属合金),并且沿着致动构件的长度的一部分设置有电绝缘材料,以在致动构件的导电材料部分之间的导电路径中形成电绝缘中断。包括电绝缘材料的致动构件的部分(在下文中称为电绝缘部分)被配置为沿着致动构件的整个长度将致动力从致动构件的近侧部分传递到致动构件的远侧部分。在一些示例性实施例中,致动构件包括近端导电部分和远端导电部分,具有设置在致动构件的这些导电部分之间的电绝缘部分。例如,电绝缘部分可以沿着致动构件的长度设置在任何地方,并且可以进一步设置在近端导电部分和远端导电部分中的一个或两者的长度内。
[0033]
图2是外科手术器械230的示例性实施例的剖视图,该外科手术器械230包括致动构件250,该致动构件250包括沿着致动构件250的长度的电绝缘部分260。电绝缘部分260在致动构件250的远端部分和近端部分之间提供电“中断”或隔离。例如,致动构件250包括导电材料(例如,金属和/或金属合金),并且电绝缘部分260可以包括设置在至少一部分金属和/或金属合金内的非导电材料,从而在致动构件250的近端部分和远端部分之间的导电路径中形成中断。此外,电绝缘部分260由非导电材料形成,该非导电材料的强度足以传递从驱动机构234沿致动构件被递送到末端执行器240的致动力(包括压力和张力)。电绝缘部分260的合适材料可以包括但不限于例如热塑性塑料(例如amodel)。amodel之所以有用,有许多原因,包括但不限于其抗拉强度和介电强度。例如,材料的最小绝缘厚度取决于材料的介电强度。amodel的介电强度大约为500伏/0.001英寸(密耳)
–
800伏/0.001英寸(密耳)。单极外科手术器械可以在约1000伏至3000伏之间通电。因此,以实现3000伏的介电强度的amodel的最小厚度大约为amodel的0.006英寸。在其他示例性实施例中,可以用作电绝缘中断的材料包括高性能聚芳基醚酮(例如peek)、叠层复合聚合物(例如kyronmax)、环氧玻璃纤维组合和陶瓷(例如alumina)。
[0034]
电绝缘部分260的放置因此可以用来减小在末端执行器240(或其他致动部件)和外科手术器械230的近端区域处的力传递机构之间沿致动构件的导电路径的长度。继而,因为这种电容耦合与致动构件的导电长度成比例,所以可以减少或防止从致动构件到器械的暴露的导电材料的电容耦合的量。即,由于在致动构件中包括电绝缘“中断”而导致的较短的导电路径减小或减轻电容耦合效应和强度。
[0035]
在示例性实施例中,例如,从致动构件啮合末端执行器的位置处产生大约6英寸的电中断,可以将器械的总电容从大约100pf减小到小于15pf。在其他示例性实施例中,电中断可以被远端地定位距远端大约3英寸内,其中空间明显受到更大的限制(例如,如在图5至图7中进一步描述的)。因此,在这样的实施例中,用于电绝缘部分的非导电材料表现出足够的强度,而不必沿着使用电绝缘材料的长度部分显著增大致动构件的外径。另外,绝缘部分的更远端的位置可以将总电容从大约100pf减小到小于5pf。通常,在整个器械内感应的电
容随着绝缘部分到器械的远端的接近而线性减小。
[0036]
图3是外科手术器械330的示例性实施例的详细剖视图,该外科手术器械330包括致动构件350,该致动构件350包括用于在致动构件350的导电路径中提供绝缘“中断”的电绝缘部分360。外科手术器械330包括具有定位在其远端处的末端执行器340的轴332。在示例性实施例中,末端执行器340包括被配置为执行例如抓握功能的钳口。然而,本领域普通技术人员将理解,可以想到其他末端执行器配置,例如用作钳子、夹持器、针驱动器、手术刀、剪刀、吻合器、夹子、烧灼工具、钩子、刀片等的那些末端执行器配置。外科手术器械330还包括致动构件350,该致动构件350定位在轴332的中心孔内,并且被配置为相对于轴332向远侧和向近侧平移,并将致动力从力传递机构(本文未示出)传递到外科手术器械330的其他部件(例如,末端执行器340)。此外,轴332可以包括向末端执行器340赋予一个或多个自由度的一个或多个关节结构。关节结构的这种组合可以称为作为平行运动连杆机构。例如,轴332包括(按从近侧到远侧的顺序)第一俯仰和/或偏航关节342、关节管部分345和第二俯仰和/或偏航关节343。尽管本文中未示出,但是另外的电缆或致动构件可延以伸穿过轴332以连接第一俯仰/偏航关节和第二俯仰/偏航关节,该第一俯仰/偏航关节和第二俯仰/偏航关节设置在关节管部分345的相对端处。另外的电缆用于致动与管部分345结合的俯仰/偏航关节342、343,以参考轴332的纵向轴线横向移动末端执行器340,而无需改变末端执行器340的取向。此外,腕部344(位于平行运动连杆机构的远端)可用于改变末端执行器340在各种自由度(dof)中的取向。
[0037]
因此,致动构件350可以被配置为传递致动力以致动或铰接关节结构342、343和344中的一个或多个。在其他示例性实施例中,可以在轴332内提供多个致动构件,并将多个致动构件配置为致动外科手术器械330的一个或多个部件,包括末端执行器340和关节结构342、343、344。此外,为了能够与致动力介接(interface)并传递致动力,致动构件350的近端部分延伸穿过轴332的非连结部分可以是相对刚性的,而致动构件350的延伸穿过关节结构342、343和/或344的远端部分可以包括柔性部分。致动构件350的柔性部分可以包括电缆(例如,诸如金属或金属合金的绞合线或编织线),该电缆具有足以使柔性部分随着关节结构342、343、344的平移和/或铰接而屈伸(例如弯曲)的柔性程度。
[0038]
此外,如本文所述,致动构件350可以包括导电材料(例如,金属和/或金属合金)以及设置在导电部分之间的电绝缘材料360,从而在致动构件350的近端部分和远端部分之间的导电路径中形成绝缘中断。包括电绝缘材料的致动构件350的部分(即,电绝缘部分360)由电绝缘的材料制成,同时该电绝缘材料的部分的强度足以在致动构件350的导电部分之间传递致动力(即,张力和/或压力)。如上所述,电绝缘部分360可以沿致动构件350的长度设置在任何地方。在这个示例性实施例中,电绝缘部分360相对于俯仰/偏航关节342设置在近端。例如,电绝缘部分360包括在电绝缘部分360的任一侧上的二次注塑成型部362,该二次注塑成型部362使得电绝缘部分360能够牢固地耦合到致动构件350,从而能够沿近端-远端方向传递致动力。用于电绝缘部分360和二次注塑成型部362的合适材料可以包括但不限于例如热塑性塑料(例如amodel)。
[0039]
图4是致动构件450的导电近端部分的示例性实施例的示意图,该致动构件450的导电近端部分包括刚性近端部分452、柔性远端部分454和电绝缘部分460,该电绝缘部分460在致动构件450的远端和近端之间提供电隔离或“中断”。如上所述(例如,关于图3),末
端执行器的远端部分可以是柔性的,以便通过轴的连结部分传递致动力,而末端执行器的近端部分可以是刚性的。在该实施例中,远端部分454和近端部分452使用压接部455物理地耦合。致动构件450的部分452和部分454可以包括导电材料(例如,金属和/或金属合金),并且电绝缘部分460可以包括非导电材料,从而在致动构件450的远端和近端之间的导电路径中形成电中断。此外,电绝缘部分460由非导电材料制成,该非导电材料的强度足以传递从驱动机构递送到外科手术器械的其他部件(例如末端执行器或腕部(或其他关节结构))的致动力(包括压力和张力)。
[0040]
因此,通过提供电绝缘部分460来减小沿致动构件450的导电路径的长度。由于在致动构件450中感应的电容耦合的量与致动构件450的导电长度成比例,因此所公开的实施例的较短的导电路径最小化在靠近绝缘部分460的方向上的电容耦合效应。此外,电绝缘套筒461设置在致动构件450的部分上方,向远侧延伸超过压接部455,以便覆盖电绝缘部分460,从而形成连续的电绝缘外表面。电绝缘套筒461包括被配置为围绕致动构件450紧密收缩的材料套筒(例如,管)。例如,电绝缘材料可以是由例如尼龙、聚烯烃或其他可热缩的和电绝缘的聚合物材料制成的热缩管。
[0041]
在上述实施例中(例如,参考图3-4),存在用于使用二次注塑成型部(例如,二次注塑成型部362)耦合的足够的空间或公差。然而,可以朝着轴的远端减小空间或公差的量,特别是在关节部分和腕部之内(和之间)。例如,在器械的铰接部分中(即,在轴的连结部分内),可能需要更多的部件(例如,致动构件)来致动各个关节,这减小了朝向轴的远端部分的横截面积。因此,下文描述的图5至图7的示例性实施例说明了用于示例性绝缘部分的替代材料及其耦合方法。
[0042]
图5是外科手术器械530的示例性实施例的详细剖视图,该外科手术器械530包括致动构件550,该致动构件550包括电绝缘部分560。外科手术器械530包括轴532,该轴532具有定位在其远端处的末端执行器540。在示例性实施例中,末端执行器540包括被配置为执行例如抓握功能的钳口。然而,本领域普通技术人员将理解,可以想到其他末端执行器配置,例如用作钳子、夹持器、针驱动器、手术刀、剪刀、吻合器、夹子、烧灼工具、钩子、刀片等的那些末端执行器配置。外科手术器械530还包括致动构件550,该致动构件550定位在轴532的中心孔内,并且被配置为相对于轴532向远侧和向近侧平移,以及将致动力从力传递机构(本文未示出)传递到外科手术器械530的其他部件(例如末端执行器540)。为了致动所描述的部件,致动构件550在近端-远端方向上的行进距离在下文中可以称为末端执行器540(及其部分)的“行程(throw)”。
[0043]
此外,轴532可以包括向末端执行器540赋予一个或多个自由度的一个或多个关节结构。例如,轴532包括俯仰/偏航关节542和543以及腕部544。因此,致动构件550可以被配置为传递致动力以致动或铰接关节结构542、543和544中的一个或多个,以便使得末端执行器540能够在各种方向或自由度(dof)上平移和铰接。在其他示例性实施例中,多个致动构件可以被提供在轴532内,并且被配置为致动外科手术器械530的一个或多个部件,包括末端执行器540和关节结构542、543、544。此外,延伸穿过轴532的非连结部分的致动构件550的近端部分可以是相对刚性的,以能够与致动力介接并传递致动力,而延伸穿过关节结构542、543和/或544的致动构件550的远端部分可以包括柔性部分。致动构件550的柔性部分可以包括电缆(例如,诸如金属或金属合金的绞合线或编织线),该电缆具有足以使柔性部
分随着关节结构542、543、544和末端执行器540的平移/或铰接而屈伸(例如弯曲)的柔性程度。
[0044]
此外,如本文所述,致动构件550可以包括导电材料(例如,金属和/或金属合金)以及设置在导电部分之间的电绝缘材料560,从而在致动构件550的近端部分和远端部分之间的导电路径中形成绝缘中断。如上所述,电绝缘部分560可以沿致动构件550的长度设置在任何地方。在该示例性实施例中,电绝缘部分560相对于俯仰/偏航关节542设置在远端,即在被容纳在关节管545内的致动构件550的部分内。此外,电绝缘部分560是刚性的非导电材料,以便能够在柔性金属部分556、柔性金属部分558之间传递力。如本文进一步所述,尽管致动构件的柔性部分556、558通过前述的关节结构被路由,但是电绝缘部分560可以被设置在致动构件的长度的一部分内,该致动构件的长度的一部分在致动构件的运动(或“行程”)范围期间保持笔直。例如,电绝缘部分560可以设置在对应于关节管部分545的区域中。通常,致动构件的“行程”可以在0.1英寸至0.5英寸之间,这取决于器械的类型。包含所描述的致动构件的示例性“冷”器械可以具有大约0.125英寸+/-0.050英寸的“行程”。
[0045]
包括电绝缘材料的致动构件550的部分(即,电绝缘部分560)由电绝缘的材料制成,同时其强度足以传递致动力(即,张力和/或压力),同时具有足够的尺寸以安装在关节管部分545内。例如,如图3所述,与轴532的更近端部分相比,当电绝缘部分设置在轴532的远端部分内时,可用于将电绝缘部分560与致动构件550耦合的空间或公差变得更小。例如,尽管图3的实施例描述了电绝缘部分在其任一侧上包括二次注塑成型部,但是在关节管部分545内的公差可能不允许这种二次注塑成型部。因此,如在图6a至图6b中进一步描述的,电绝缘部分560可以使用例如压接的海波管耦合到致动构件550。此外,尽管近端设置的电绝缘部分(例如,在图3至图4中描述的)利用诸如amodel的材料来构造,但是设置在关节管部分545中的电绝缘部分560可以由玻璃纤维和塑料材料的组合制成,该组合能够使用压接的海波管来压接。这种非导电的塑料/玻璃纤维混合材料可能能够承受由致动力引起的所需的机械载荷。电绝缘部分960中使用的其他非导电材料可以包括玻璃纤维拉挤成型(例如,“s-玻璃纤维玻璃”)、高性能聚芳醚酮(例如peek)、叠层复合聚合物(例如kyronmax)、环氧玻璃纤维组合和陶瓷(例如alumina)。
[0046]
因此,设置在柔性导电部分556、558之间的刚性电绝缘部分560能够在导电部分556和导电部分558之间的导电路径中形成电中断。因此,通过提供电绝缘部分560,减小末端执行器540和外科手术器械530的近端之间的导电路径的长度。由于在致动构件中感应的电容耦合的量(例如,通过附近的用电能通电的外科手术器械)与致动构件的导电长度成比例,所公开的实施例的较短的导电路径(即在末端执行器540与电绝缘部分560之间)最小化在靠近绝缘部分560的方向上的电容耦合效应。
[0047]
图6a和图6b示出电绝缘部分660设置在其中的致动构件650的示例性实施例的示意图。例如,电绝缘部分660被配置为在致动构件650的远端部分和近端部分之间提供电隔离。在该示例性实施例中,致动构件650包括电绝缘部分660的远端的第一部分656和电绝缘部分660的近端的第二部分658。此外,电绝缘部分660分别使用压接的海波管663、664耦合到第一部分656和第二部分658中的每一个。例如,海波管663被提供在致动构件650的第一部分656和电绝缘部分660的远端上方,并且压接以形成耦合。类似地,海波管664被压接在致动构件650的第二部分658和电绝缘部分660的近端上方。此外,致动构件650的第一部分
656和第二部分658可以包括柔性导电材料,其能够平移和/或铰接诸如末端执行器或关节结构(本文未示出)的外科手术器械的部件。例如,容纳导电部分656、导电部分658的轴(本文未示出)可以包括向末端执行器赋予一个或多个自由度的一个或多个关节结构。因此,致动构件650的部分656、部分658可以由柔性材料制成,例如具有足以使得能够随着末端执行器或关节结构的平移和/或铰接而屈伸的柔性程度的电缆。
[0048]
此外,电绝缘部分660由刚性非导电材料制成,以便能够在柔性部分656、658之间传递力。如本文进一步所述,尽管致动构件的柔性部分656、658通过前述的关节结构被路由,电绝缘部分660可以被设置在致动构件的长度的一部分内,该致动构件的长度的一部分在致动构件650的运动范围(或“行程”)期间保持笔直。例如,电绝缘部分660可以设置在与关节管部分(例如,图5中的接头管部分545)相对应的区域中。此外,电绝缘部分660由非导电材料形成,该非导电材料的强度足以传递从驱动机构递送的致动力(包括推力和拉力)。
[0049]
因此,设置在柔性导电部分656、柔性导电部分658之间的刚性电绝缘部分660能够在导电部分656和导电部分658之间的导电路径中形成电中断。因此,通过提供电绝缘部分660,减少致动构件650的远端和近端之间的导电路径的长度。由于在致动构件中感应的电容耦合的量(例如,通过附近的用电能通电的外科手术器械)与致动构件的导电长度成比例,所公开的实施例的较短的导电路径最小化在靠近绝缘部分660的方向上的电容耦合效应。此外,电绝缘套筒661设置在电绝缘部分660上方并向近侧和向远侧延伸超过压接的海波管663、664,从而形成连续的电绝缘的外表面。电绝缘套筒661包括被配置为围绕电绝缘部分660和压接的海波管663紧密收缩的材料套筒(例如,管)。例如,电绝缘材料可以是由例如尼龙、聚烯烃或其他可热缩和电绝缘的聚合物材料制成的热缩管。
[0050]
如上所述,器械的轴可以可选地包括一个或多个关节结构,该关节结构向耦合到器械的远端的末端执行器赋予一个或多个自由度。图7示出器械730的示例性实施例,其包括提供在轴732中的一个或多个关节结构。例如,如图7所示,一个或多个关节结构包括俯仰/偏航关节742、743(具有任意限定的术语“俯仰”和“偏航”)以及连结的腕部744。例如,俯仰关节被配置为在第一旋转的平面中平移末端执行器740,偏航关节被配置为在第二旋转的平面中平移末端执行器740,并且腕部744被配置为在各个方向上铰接末端执行器740。此外,位于俯仰/偏航关节742和743之间的轴732的部分可以称为关节管部分745。
[0051]
因此,在各个示例性实施例中,延伸穿过轴732的非连结部分的致动构件的近端部分可以是相对刚性的,以能够与来自力传递机构734的力介接并传递该力,而延伸穿过连结的结构742、743、744的致动构件的远端部分可以包括柔性部分。致动构件的柔性部分可以包括电缆(例如,诸如金属或金属合金的绞合线或编织线),该电缆具有足以使柔性部分随着关节结构741的平移和/或铰接而屈伸(例如弯曲)的柔性程度。此外,致动构件可以包括由刚性非导电材料制成的电绝缘部分,以使得能够通过关节管部分745传递力。例如,如参考图5所述的,尽管致动构件的柔性部分通过上述关节结构被路由,但是电绝缘部分可以设置在柔性致动构件的长度的一部分内,该柔性致动构件的长度的一部分在致动构件的运动范围(或“行程”)期间保持笔直,即在与关节管部分745相对应的区域内。因此,电绝缘部分由非导电的材料形成,该非导电的材料的强度足以传递从驱动机构734递送的致动力(包括推力和拉力)。
[0052]
如上所述,可以在除致动构件之外的器械的部件中提供电绝缘“中断”。例如,由于
致动构件中的电能,在器械的各种导电部件中感应出上面所描述的电容耦合效应。这些各种部件包括金属管,例如器械的主轴、远端主管、平行运动机构管以及外科手术器械的其他通常细长的部件。类似于致动构件,这些导电部件的电容与它们的长度成正比。因此,附加的示例性实施例包括导电(例如金属)部件,该导电部件包括绝缘中断以减小部件的导电长度,从而减小其电容。
[0053]
图8是根据本公开的外科手术器械的示例性实施例的透视示意图,该外科手术器械包括具有电绝缘部分的轴。外科手术器械830包括轴832,该轴832具有在其远端区域处耦合的末端执行器840。如上面所描述的和本领域普通技术人员所熟悉的,耦合在轴832的近端区域处的力传递机构834产生致动力,该致动力经由一个或多个致动构件850传递,以致动或铰接轴832的各个部件或末端执行器840。轴832和末端执行器840的直径通常根据要与外科手术器械830一起使用的套管或其他引导结构的尺寸并且取决于所执行的外科手术程序来选择。在各种示例性实施例中,轴832的直径在约4mm至约10mm的范围内,例如,约5mm至约8mm。致动构件850可以被定位在轴832的中心孔内。致动构件850被配置为传递在力传递机构834处产生的致动力。例如,致动构件850可以是能够传递张力(即拉力)和/或压力(即推力)以致动外科手术器械830的其他部件(例如末端执行器840)的压缩杆状构件或电缆构件。
[0054]
轴832包括导电材料(例如,金属和/或金属合金),该导电材料具有沿着轴832的长度的一部分设置的一个或多个电绝缘部分861、862。可以对一个或多个电绝缘部分861进行尺寸标注和布置,以便在沿着轴832的长度(例如在轴832的近端和远端之间)的导电路径中形成电绝缘“中断”。结果,轴832的导电路径可以被分成彼此电绝缘的各个部分。例如,在图8所示的示例性实施例中,电绝缘部分861、862被定位成使得轴832包括三个导电但电隔离的长度部分:863、864和865。由于电容耦合的量进一步与器械轴本身的长度成比例,所以将轴的导电长度减小为两个或更多个(彼此电绝缘的)导电长度部分,可以进一步减小由器械的其他通电部件(例如,通电的致动构件)在器械轴内感应的电容耦合效应。在其他示例性实施例中,一个或多个电绝缘部分(例如电绝缘部分861和862)可以沿着轴832的长度设置在任何地方,以缩短轴832的不同区域中的导电路径。例如,绝缘层或绝缘护套可以被设置在轴832的第一部分上方,而轴832的第二部分可以暴露。因此,在第一部分和第二部分之间设置电绝缘部分将第二部分与第一部分电绝缘,从而导致轴的第二部分中的电容耦合减小。
[0055]
此外,电绝缘部分861、电绝缘部分862由非导电材料形成,该非导电材料的强度足以为轴提供结构完整性。用于电绝缘部分861、862的合适材料可以包括但不限于例如热塑性塑料(例如amodel)、高性能聚芳基醚酮(例如peek)、叠层复合聚合物(例如kyronmax)、环氧玻璃纤维组合、陶瓷(例如alumina)或基于聚合物的管。
[0056]
如上面所描述的,可能存在器械的附加导电部件,这些附加导电部件引起意想不到的电效应。例如,在器械的长度延展(run)的电缆海波管装配件可以与主轴的内壁接触,主轴通过其电绝缘部分连接旨在彼此绝缘的管的部分。因此,这些单独的海波管还包括沿其长度或在特定区域中的电绝缘部分。在其他示例性实施例中,器械的多个导电部件可以被提供绝缘“中断”,绝缘“中断”位于最小化器械的总电容的位置。例如,具有在中部向下延展以提供电能的附加电缆或导线的器械(例如双极器械)可能引起与海波管的电容耦合,因
此,海波管(或其部分)可以由电绝缘材料制成。例如,可以在跨越主管中的“中断”的一个或多个海波管装配件中提供介电“中断”,以便从中心杆或导线电容性地耦合到主管和海波管的近端部的能量与海波管和主管的远端部绝缘。在示例性实施例中,直径为8mm的器械护套可以包括由vectran制成的绝缘“中断”。
[0057]
上述示例性实施例涉及诸如外科手术器械的器械,但不限于这种应用。例如,本文描述的概念可适用于非外科手术环境中的可远程致动的器械的其他应用,其中可能期望减少器械内部或外部的致动构件的电容耦合,并且通常缩短或控制意外的电路径。此外,根据本公开的示例性实施例的致动构件在致动构件的外部远端部分和近端部分之间提供电绝缘,同时使得致动构件的部分能够由具有相对高的抗拉强度、硬度和/或韧性的金属或金属合金构造。由于金属/合金和(坚硬的绝缘材料)近端部分和远端部分之间的材料特性,因此这种构造提供了可靠的操作和寿命。这样的致动构件还可以减少器械的远侧部分和近侧部分之间的导电路径,从而减小或消除可以在所述致动构件中、在所述致动构件和器械的其他部分(例如,在器械轴、腕部或其他暴露的导电部分)之间感应的电容耦合效应。
[0058]
通常,基于用于形成电绝缘部分的材料的介电强度,本文所图示的示例性致动构件的电绝缘部分的长度大于最小长度。此外,选择用来形成电绝缘部分的材料能够承受器械的工作温度,该工作温度可以达到150摄氏度,并且具有良好的电弧跟踪特性。在一些示例性实施例中,结合有这种电绝缘材料的外科手术器械的部分可以是一次性的。这样的一次性使用示例可以结合由不需要经受重复电效应的材料形成的电绝缘部分,并且可以基于材料的强度或材料将致动力传递到末端执行器的能力来选择。这种材料的示例包括玻璃填充的聚合物、陶瓷等。此外,在电绝缘部分靠近外科手术器械远端提供的示例性实施例中,公差较小(例如,大约直径0.01英寸-0.3英寸以及长0.8英寸-1英寸),并且可以使用比注模塑料更坚固的不同材料,例如使用拉挤成型(例如“s-玻璃纤维玻璃”)制造并封装在环氧树脂中的玻璃纤维。在较小的公差下,可以利用压接将电绝缘部分与导电部分耦合。因此,可以在这些示例性实施例中使用能够承受压接的材料,包括机械加工的蓝宝石、吹塑陶瓷及其组合(例如涂覆有陶瓷薄层的金属,并且陶瓷层的厚度足够薄以承受压接)。
[0059]
说明示例性实施例的本说明书和附图不应视为限制。在不脱离本说明书和所要求保护的本发明的范围的情况下,可以进行各种机械、组成、结构、电气和操作上的改变,包括等同物。在一些情况下,未详细示出或描述公知的结构和技术,以免混淆本公开。在两个或更多个附图中,相似的数字表示相同或相似的元件。此外,在可行的情况下,参照一个实施例详细描述的元件及其相关特征可以被包括在未具体示出或描述这些元件及其相关特征的其他实施例中。例如,如果参照一个实施例详细描述了一个元件,而没有参照第二实施例进行描述,则仍然可以要求该元件包括在第二实施例中。
[0060]
出于本说明书和所附权利要求书的目的,除非另有说明,否则在本说明书和权利要求书中使用的表示数量、百分比或比例的所有数字以及其他数值应理解为在所有情况下(如果尚未对其进行修改)均由术语“约”进行修改。因此,除非有相反的指示,否则以下说明书和所附权利要求书中列出的数值参数是近似值,其可以根据试图获得的所需特性而变化。至少,并且不试图将等同原则的应用限制于权利要求的范围,每个数值参数至少应根据所报告的有效数字的数目并通过应用普通的舍入技术来解释。
[0061]
注意,在本说明书和所附权利要求书中使用的单数形式“一”、“一个”和“该”以及
任何词的任何单数用法,除非明确并且不含糊地限定为一个指代,都包括复数指代。如本文所使用的,术语“包括”及其语法变体旨在非限制性的,使得列表中的项目的列举不排除可以替换或添加到所列项目的其他类似项目。
[0062]
此外,本说明书的术语并不旨在限制本发明。例如,如附图中所示,空间相对术语——例如“在...下方”、“在
…
下面”、“下方的”、“在
…
上面”、“上方的”、“近端的”、“远端的”等可用于描述一个元件或特征与另一个元件或特征的关系。除附图中所示的方位和取向之外,这些空间相对术语还旨在涵盖使用或操作中的设备的不同方位(即位置)和取向(即旋转放置)。例如,如果附图中的设备被翻转,则被描述为在其他元件或特征“下方”或“之下”的元件将在其他元件或特征“上方”或“之上”。因此,示例性术语“在...下方”可以包括上方和下方的方位和取向。可以以其他方式定向设备(旋转90度或以其他方向),并且本文中所使用的空间相对描述符可以相应地解释。
[0063]
鉴于本文的公开内容,进一步的修改和替代实施例对于本领域普通技术人员将是显而易见的。例如,设备和方法可以包括为了操作的清楚而从图和说明书中省略的附加部件或步骤。因此,本说明书仅应被解释为说明性的,并且是为了教导本领域技术人员实施本教导的一般方式。应当理解,本文所示和所描述的各种实施例将被视为示例性的。受益于本文的描述之后,对于本领域技术人员显而易见的是,元件和材料以及这些元件和材料的布置可以代替本文中示出和描述的那些,可以颠倒部件和过程,并且可以独立地利用本教导的某些特征。在不脱离本教导和所附权利要求的精神和范围的情况下,可以对本文所述的元件进行改变。
[0064]
应当理解,本文阐述的特定示例和实施例是非限制性的,并且可以在不脱离本教导的范围的情况下对结构、尺寸、材料和方法进行修改。
[0065]
通过考虑本文公开的发明的说明书和实践,根据本公开的其他实施例对于本领域技术人员将是显而易见的。旨在将说明书和示例仅视为示例性的,并且根据适用法律,所附权利要求书享有其最大宽度,包括等同形式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1