轮椅机器人的制作方法
1.本实用新型涉及轮椅技术领域,尤其涉及一种轮椅机器人。
背景技术:
2.伴随生活水平提高和医疗技术发展,人类寿命增长,人口老龄化问题越来越突出,交通事故的频发以及自然灾害的发生也会导致残障,爬楼成为他们的生活障碍。因此,设计研发具备爬梯功能的轮椅机器人非常必要,有助于改善老年人和残障人士的生活质量,促进社会和谐发展。
3.高楼的建造虽然满足了人们提高生活质量、扩大生活空间的需要,但是在我国的大多数城市,楼层里很少配备有电梯,多数还是依靠楼梯上下楼。因此,对于老年人和肢体残疾者来说,高楼不但没能提高他们的生活质量、扩大他们的生活空间,反而给他们的生活带来了很大的不便,他们的生活空间仅仅被局限在四周钢筋混凝土墙壁的家中。这样就严重影响了老年人和肢体残疾者与外界的交流,由于缺乏与外界的交流与沟通,缺少身体锻炼,容易产生一些心理和身体疾病并产生一些严重的社会问题。现有技术中的爬楼机器人为这一人群的生活提供了巨大的帮助,扩大了他们的生活空间,提高了他们独立生活的能力。
4.目前尚有的爬楼梯机器人主要由以下几种:
5.1)轮式爬楼梯机构:
6.轮式爬楼梯机构可在平路上平稳、快速的移动,且能量损耗小,转向灵活,如果采用差动控制的话还可以有效的减小转弯半径,在平整的路面上行走时有较明显的优势。但是如果遇到如沟壑、台阶、楼梯等路况不好的情况时,轮式机构的不足也是相当明显的。如果一个普通轮式机构想越过障碍,其车轮的半径必须大于障碍物的高度,这样就会增大机构体积且造成较大的冲击或颠簸,同时会造成较大的能量消耗,这常常使普通的轮式机构不能达到使用者的要求。轮式爬楼梯机构的结构相对简单,但在爬梯时重心波动大,舒适度差。
7.2)步行式爬楼梯机构:
8.步行式爬楼梯机构通过仿生学来模仿人或动物的行走方式实现机器人的越障功能。在目前的爬楼梯机构来看,步行式爬楼梯机构是最灵活,适应范围最广的越障机构,从理论性来看,它能够在大多数环境下自由的行走。但是,步行式爬楼梯机构的机械结构往往比较复杂,装配和维修困难;控制难度大且工作效率比较低,要想使该机构能够响应快速且灵活平稳的运动,目前还有很多难题没有解决,虽然设计人员对该设计进行了优化,但是目前仍然存在不少的问题:如移动速度慢,机构与控制复杂,承载能力差等,因此很难大面积应用到实际生活当中。履带式爬楼梯机构
9.3)履带式爬楼梯机构:
10.履带式爬楼梯机构虽然在上下楼梯过程中具有较大的优势,但是由于履带式爬楼梯机构在平路上行走时效率较低,速度较慢,且灵活性差,无法实现其在平路上的快速灵活
移动。
11.对比现有各个的爬楼梯机构,轮式爬楼梯机构结构简单,但无法实现平稳的上下楼梯;步行式爬楼梯机构能够适应多种地形且能够顺利的爬楼梯,但机构及控制困难,在实用性方面,还有很多问题需要解决;辅助式机构由于楼梯的尺寸没有完全统一而容易发生危险;履带式爬楼梯机构虽然能够顺利平稳的上下楼梯,但效率低。
12.目前研制的产品中,都不能完全适用于我国建筑结构,不能快捷平稳的上下楼梯,无法在抢救过程中使用。另外,对于肢体伤残或脊椎伤残者上下轮椅时也很不便,没有辅助锻炼康复功能等。
13.综上可知,现有的爬楼梯机器人的结构在实际使用上,显然存在不便与缺陷,所以有必要加以改进。
技术实现要素:
14.针对上述的缺陷,本实用新型的目的在于提供一种轮椅机器人,可以变换所述轮椅机器人的形态,使得所述轮椅机器人功能变换为可移动床机器人,以供在在抢救过程中使用;或者变换为立式支撑架,辅助锻炼康复功能。
15.为了实现上述目的,本实用新型提供了一种轮椅机器人,包括:
16.座椅机构,其包括支撑主板、座板架、靠背架以及脚架,所述支撑主板承载所述座板架;所述靠背架通过第一铰接件可旋转连接于所述座板架的后侧;所述脚架通过第二铰接件可旋转连接于所述座板架的前侧;并且所述第二铰接件安装于所述支撑主板的前侧;
17.行走机构,所述行走机构连接于所述支撑主板的下侧。
18.根据所述的轮椅机器人,还包括:
19.支撑杆,设置有两根,分别设置于所述支撑主板的左右两侧;所述支撑杆的一端与所述支撑主板的前端的侧面可旋转连接,其另一端与所述座板架的后端的侧面连接。
20.根据所述的轮椅机器人,所述支撑杆为气弹簧。
21.根据所述的轮椅机器人,所述行走机构包括车轮行走机构以及履带行走机构;
22.所述车轮行走机构包括两个车前轮以及两个车后轮,两个所述车前轮分别通过两个第一摆动机构可上下摆动设置于所述履带行走机构的前端的左右两侧;所述车前轮位于所述支撑主板的前下方;
23.所述车前轮通过万向轴机构连接于所述第一摆动机构上;所述万向轴机构包括万向轴以及驱动所述万向轴转动的第一驱动电机;
24.两个所述车后轮分别通过两个第二摆动机构可上下摆动连接于所述支撑主板的左右两侧,并且所述车后轮位于所述支撑主板的后下方。
25.根据所述的轮椅机器人,所述履带行走机构包括连接于所述支撑主板的左下侧的履带机构以及连接于所述支撑主板的右下侧的履带机构;
26.所述履带机构包括:
27.履带支撑架;
28.履带,套设于所述履带支撑架外侧;
29.驱动机构,用于驱动所述履带转动,并设置于所述履带支撑架上;
30.连接机构,其一端连接于所述履带支撑架的上侧,另一端连接于所述支撑主板的
下侧。
31.根据所述的轮椅机器人,所述连接机构包括:
32.连接杆,所述连接杆的上端连接所述支撑主板;
33.第一旋转轴,其可旋转设置于所述连接杆的下端;所述第一旋转轴连接所述履带支撑架;
34.第二驱动电机,与所述第一旋转轴传动连接以驱动所述旋转轴旋转。
35.根据所述的轮椅机器人,所述连接杆的上端通过设置第二旋转轴与所述支撑主板连接;所述第二旋转轴与第三驱动电机传动连接,以驱动所述第二旋转轴旋转;所述轮椅机器人还包括座椅平衡机构,其包括:
36.用于获取所述支撑主板的水平状态的检测信息的陀螺仪传感器;
37.第一推杆,连接于所述支撑主板前下侧;
38.第四驱动电机,与所述陀螺仪传感器通信连接,并根据所述陀螺仪传感器的检测信息驱动所述第一推杆推动所述支撑主板处于水平状态。
39.根据所述的轮椅机器人,所述履带行走机构还包括:
40.辅助履带机构,其可旋转安装于所述履带支撑架的前端的侧面;
41.第二推杆,与所述辅助履带机构连接;
42.第五驱动电机,与所述第二推杆传动连接;
43.当所述履带机构处于下楼姿态,并且所述履带机构的前端爬行至楼梯的第一台阶时,所述第五驱动电机驱动所述第二推杆推动所述辅助履带机构旋转至所述辅助履带机构的前端旋转至与地面相接触的位置。
44.根据所述的轮椅机器人,所述履带支撑架的后端朝后上方弯折,并且在所述履带支撑架上对应弯折点设置有压带轮;所述压带轮设置在所述履带的上方。
45.根据所述的轮椅机器人,所述履带支撑架的下端设置为呈直板状的履带卡槽。
46.在本实用新型实施例提供了一种轮椅机器人,包括:座椅机构,其包括支撑主板、座板架、靠背架以及脚架,所述支撑主板承载所述座板架;所述靠背架通过第一铰接件可旋转连接于所述座板架的后侧;所述脚架通过第二铰接件可旋转连接于所述座板架的前侧;并且所述第二铰接件安装于所述支撑主板的前侧;行走机构,所述行走机构连接于所述支撑主板的下侧。由于座椅机构中的各个部件通过可旋转连接的方式进行连接,当旋转靠背架以及旋转脚架至与该座板架平齐成横板时,该轮椅机器人功能变换形态成为可移动床机器人,以供在在抢救过程中使用;当旋转座板架以及靠背架至与该脚架平齐成竖板时,该轮椅机器人变换形态成为立式支撑架,可以辅助锻炼康复功能。借此,该轮椅机器人可以变换形态以满足用户不同的要求,从而使得轮椅机器人还可以在在抢救过程中使用以及提供辅助锻炼康复功能。
附图说明
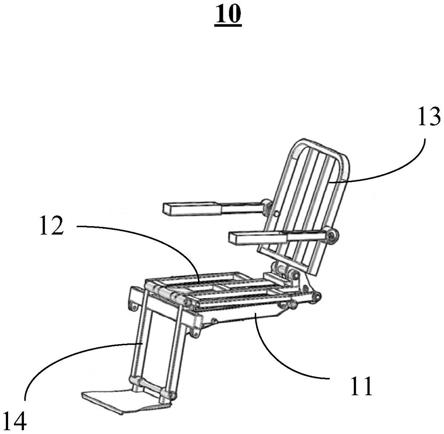
47.图1是本实用新型实施例提供的座椅机构的结构示意图;
48.图2是本实用新型实施例提供的轮椅机器人的结构示意图;
49.图3是本实用新型实施例提供的履带行走机构的右侧视图;
50.图4是本实用新型实施例提供的履带行走机构的左侧视图。
具体实施方式
51.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
52.参见图1~图4,在本实用新型的第一实施例中提供了一种轮椅机器人100,包括:
53.座椅机构10,其包括支撑主板11、座板架12、靠背架13以及脚架14,支撑主板11承载座板架12;靠背架13通过第一铰接件可旋转连接于座板架12的后侧;脚架14通过第二铰接件可旋转连接于座板架12的前侧;并且第二铰接件安装于支撑主板11的前侧;
54.行走机构,行走机构连接于支撑主板11的下侧。
55.在该实施例中,在座椅机构10中的座板架12、靠背架13以及脚架14等各个部件通过可旋转连接的方式进行连接,当旋转靠背架13以及旋转脚架14至与该座板架12平齐成横板时,该轮椅机器人100功能变换形态成为可移动床机器人,以供在在抢救过程中使用;当旋转座板架12以及靠背架13至与该脚架14平齐成竖板时,该轮椅机器人100变换形态成为立式支撑架,可以辅助锻炼康复功能。旋转座板架12、靠背架13或者脚架14时可以采用手动的方式旋转,在通过固定件固定即可,结构相对简单;也可以通过电动的方式旋转,旋转过程相对简单。支撑主板11与行走机构连接可以承载座椅机构10,并带动座椅机构10行走。可选的是,脚架14上可以设置脚踏板;靠背架13上可以设置扶手。为了提高安全性,还可以在座椅机构10上设置安全带等等。
56.参见图1~图4,在本实用新型的第二实施例中,该轮椅机器人100还包括:
57.支撑杆20,设置有两根,分别设置于支撑主板11的左右两侧;支撑杆20的一端与支撑主板11的前端的侧面可旋转连接,其另一端与座板架12的后端的侧面连接。
58.在该实施例中,为了提高安全性,支撑杆20可以在旋转座板架12与该脚架14平齐成竖板时提供一个支持力,减轻座板架12与脚架14之间的连接件或者固定件的负担,提高稳定性。
59.优选的是,支撑杆20为气弹簧,气弹簧不仅可以支撑该座板架12,而且在旋转的过程中该气弹簧可以控制座板架12缓缓旋转,旋转落下时也可以缓缓落下,避免意外的发生。
60.参见图2~图4,在本实用新型的第三实施例中,行走机构包括车轮行走机构以及履带行走机构;
61.车轮行走机构包括两个车前轮31以及两个车后轮32,两个车前轮31分别通过两个第一摆动机构33可上下摆动设置于履带行走机构的前端的左右两侧;车前轮31位于支撑主板11的前下方;
62.车前轮31通过万向轴机构34连接于第一摆动机构33上;万向轴机构34包括万向轴以及驱动万向轴转动的第一驱动电机;
63.两个车后轮32分别通过两个第二摆动机构35可上下摆动连接于支撑主板11的左右两侧,并且车后轮32位于支撑主板11的后下方。
64.在该实施例中,行走机构包括车轮行走机构以及履带行走机构,在平地上行走时可以切换至车轮行走机构驱动座椅机构10移动,方便快速;而在爬楼梯时,可以切换至履带行走机构驱动座椅机构10移动,稳定性高。为了避免车轮行走机构影响履带行走机构的行驶,可以设置第一摆动机构33以及第二摆动机构35控制车前轮31和车后轮32上下摆动。摆
动机构包括驱动电机以及旋转轴,驱动电机驱动旋转轴旋转带动车前轮31或者车后轮32上下摆动。车前轮31连接万向轴,因此可以改变车前轮31的方向来改变轮椅的移动方向。可选的,车后轮32的直径大于车前轮31,可以提高稳定性,可选的,车后轮32的直径为32寸。左右两个车后轮32与支撑主板11连接,可以提供支撑主板11支持力,从而提高稳定性。可选的,车前轮31可以在履带行走机构处于下楼姿态时,并且履带行走机构的前端行驶到楼梯底部的第一个台阶时,第一摆动机构33驱动车前轮31逐渐向下摆动与地面相接触,提供支撑,避免座椅机构10产生太大颠簸。车后轮32也可以在履带行走机构处于下楼姿态时,并且履带行走机构的后端行驶到楼梯底部的第一个台阶时,第二摆动机构35驱动车后轮32逐渐向下摆动与地面相接触,提供支撑,避免座椅机构10晃动的同时也使得行走机构由履带行走机构直接切换至车轮行走机构,衔接灵活。在履带行走机构处于上楼姿态时,可以由履带行走机构的后端开始向上爬行,当履带行走机构的后端与第一台阶相接触时,第二摆动机构35驱动车后轮32向上摆动。当履带行走机构的前端行驶到最后一个台阶时,可以第二摆动机构35驱动车后轮32向下摆动,提供支撑,避免晃动,提升用户的舒适度。
65.参见图2~图4,在本实用新型的第四实施例中,履带行走机构包括连接于支撑主板11的左下侧的履带机构40以及连接于支撑主板11的右下侧的履带机构40;
66.履带机构40包括:
67.履带支撑架41;
68.履带42,套设于履带支撑架41外侧;
69.驱动机构,用于驱动履带42转动,并设置于履带支撑架41上;
70.连接机构50,其一端连接于履带支撑架41的上侧,另一端连接于支撑主板11的下侧。
71.在该实施例中,该履带行走机构对称设置两个履带机构40,可以提高稳定性。履带42套设于该履带支撑架41外侧,爬楼时通过履带42与楼梯柔性接触,减少对楼梯的损伤。驱动机构包括主动轮、从动轮以及两个分别驱动主动轮和从动轮的驱动电机。连接机构50的一端可以设置于履带支撑架41的上侧的前端,另一端可以连接于支撑主板11的下侧的中间区域位置。
72.参见图3~图4,在本实用新型的第五实施例中,连接机构50包括:
73.连接杆51,连接杆51的上端连接支撑主板11;
74.第一旋转轴52,其可旋转设置于连接杆51的下端;第一旋转轴52连接履带支撑架41;
75.第二驱动电机,与第一旋转轴52传动连接以驱动旋转轴旋转。
76.在该实施例中,通过该连接机构50,履带机构40可以根据台阶的高度进行旋转调整,并且在这个过程中,可以尽可能保持座椅机构10处于水平状态,不会带动座椅机构10大幅度倾倒,提升用户体验。
77.参见图1~图4,在本实用新型的第六实施例中,连接杆51的上端通过设置第二旋转轴53与支撑主板11连接;第二旋转轴53与第三驱动电机传动连接,以驱动第二旋转轴53旋转;轮椅机器人100还包括座椅平衡机构,其包括:
78.用于获取支撑主板11的水平状态的检测信息的陀螺仪传感器;
79.第一推杆,连接于支撑主板11前下侧;
80.第四驱动电机,与陀螺仪传感器通信连接,并根据陀螺仪传感器的检测信息驱动第一推杆推动支撑主板11处于水平状态。
81.在该实施例中,为了进一步提升用户体验,通过该座椅平衡机构可以尽可能的保持用户的座椅机构10处于水平状态,通过第一推杆推动支撑主板11来对座椅机构10的水平状态进行调整。
82.参见图1~图4,在本实用新型的第七实施例中,履带行走机构还包括:
83.辅助履带机构60,其可旋转安装于履带支撑架41的前端的侧面;
84.第二推杆70,与辅助履带机构60连接;
85.第五驱动电机,与第二推杆70传动连接;
86.当履带机构40处于下楼姿态,并且履带机构40的前端爬行至楼梯的底部的第一台阶时,第五驱动电机驱动第二推杆70推动辅助履带机构60旋转至辅助履带机构60的前端旋转至与地面相接触的位置。
87.在该实施例中,在下楼姿态时,在履带机构40开始下楼梯之前,可以由第五驱动电机驱动第二推杆70推动辅助履带机构60首先下摆至台阶上行驶,再进一步带动履带机构40行驶到台阶上,减少晃动,提高稳定性。当履带机构40的前端已经爬行至楼梯的底部的第一台阶时,第五驱动电机也驱动第二推杆70推动该辅助履带机构60旋转至辅助履带机构60的前端旋转至与地面相接触的位置,提供支撑力。
88.参见图3~图4,在本实用新型的第八实施例中,履带支撑架41的后端朝后上方弯折,并且在履带支撑架41上对应弯折点设置有压带轮80;压带轮80设置在履带42的上方。
89.在该实施例中,履带支撑架41的后端朝后上方弯折,使得履带机构40处于上楼姿态时,可以将该后端靠在第一级台阶上,再逐步向上爬行并逐步抬高履带机构40的下端使其最终能够压在台阶上行驶,由此,通过该形状设置可以逐步确认爬行角度,行驶稳定。由于履带支撑架41的后端朝后上方弯折,压带轮80用于辅助履带42的转动,避免履带42在弯折处飘浮。
90.参见图3~图4,在本实用新型的第九实施例中,履带支撑架41的下端设置为呈直板状的履带卡槽90。
91.在该实施例中,履带支撑架41的下端设置为呈直板状的履带卡槽90从而可以在平地上行驶,提高行驶的稳定性,使用户乘坐时更加舒适。
92.综上所述,在本实用新型实施例提供了一种轮椅机器人,包括:座椅机构,其包括支撑主板、座板架、靠背架以及脚架,所述支撑主板承载所述座板架;所述靠背架通过第一铰接件可旋转连接于所述座板架的后侧;所述脚架通过第二铰接件可旋转连接于所述座板架的前侧;并且所述第二铰接件安装于所述支撑主板的前侧;行走机构,所述行走机构连接于所述支撑主板的下侧。由于座椅机构中的各个部件通过可旋转连接的方式进行连接,当旋转靠背架以及旋转脚架至与该座板架平齐成横板时,该轮椅机器人功能变换形态成为可移动床机器人,以供在在抢救过程中使用;当旋转座板架以及靠背架至与该脚架平齐成竖板时,该轮椅机器人变换形态成为立式支撑架,可以辅助锻炼康复功能。借此,该轮椅机器人可以变换形态以满足用户不同的要求,从而使得轮椅机器人还可以在在抢救过程中使用以及提供辅助锻炼康复功能。
93.当然,本实用新型还可有其它多种实施例,在不背离本实用新型精神及其实质的
情况下,熟悉本领域的技术人员当可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1