一种用于火箭模型的姿控变轨系统的制作方法
[0001]
本实用新型属于航天模型技术领域,具体涉及一种用于火箭模型的姿控变轨系统。
背景技术:
[0002]
国内航天模型主要以东风一号、小力士、飞天梦、天鹰自旋翼、大力士和长二丙为主,这些火箭模型均采用垂直发射,发射升空后,受到发射杆约束,飞行姿态和轨迹一般不会改变。简易航天模型变轨系统主要应用于直径120mm以上的火箭模型上,装载该系统的火箭模型发射升空后,可以根据设定的时序和发射角度完成变轨飞行。
[0003]
变轨系统主要用于实现导弹变轨飞行,主要应用在一些弹道导弹上,在航天模型领域还没有此类成熟技术。与模型领域飞行器姿态控制接近的方法主要有两种:水银开关式姿态变轨控制系统和空气动力控制。
[0004]
1、水银开关式姿态变轨控制系统
[0005]
水银开关,又称倾侧开关,以一接着电极的小巧容器储存者一小滴水银,容器中多数为真空或者注入惰性气体。水银开关式姿态变轨控制系统是以水银开关为核心,借助水银开关特性,并结合火箭模型在空中姿态变化,从而实现火箭模型姿态变轨,与时序控制电路配合使用。使用时,根据预定姿态变轨方向,给带发射火箭预置一定发射角度,点火器起飞后,由于火箭模型倾斜,对应水银开关中水银流动,开关闭合,当到达设定时序后,水银姿控变轨系统通电,并控制相应姿控发动机工作,从而实现火箭模型姿控变轨。
[0006]
2、空气动力控制
[0007]
空气动力控制是根据运动的相对性原理和气体流动时的基本定律,当飞行器在大气中以一定的速度飞行时,飞行器都会受到空气动力的作用。空气动力可以分解为升力、侧力和阻力,而对应的气动力矩可以分解为影响飞行器姿态的滚转力矩、偏航力矩和俯仰力矩。空气动力和力矩与飞行器的飞行速度、飞行高度、飞行器的外形及飞行器相对来流的姿态因素有关。来流速度越大,即飞行器速度越大,动能就越大,来流吹到飞行器上后,由于受到阻滞,大部分动能转化为压力能,总的空气动力也增大。基本上来说,升力、侧立和阻力与飞行器速度的平方成正比。空气密度越大,则空气的惯性就越大,飞行器向前飞行需要的推力就越大。根据作用力与反作用力的原理,空气必将以更大的力作用在飞行器上。因此,空气动力与空气密度成正比。由于空气密度随高度增加而减小,所以高度越高,作用在飞行器上的气流速度分部也不同,必然影响着空气动力的大小和方向。使用空气动力来控制飞行器姿态是一种成熟的技术,该技术通过检测飞行器的姿态、飞行速度、气压等参数,并反馈给内部计算机系统,计算机系统根据检测到的数据进行分析计算,尔后将控制指令发送给舵机系统,通过舵机调整飞行器上的翼片来实现姿态控制。
[0008]
但是,水银开关式姿态变轨控制系统和空气动力控制有如下缺陷:
[0009]
(1)水银开关式姿态变轨控制系统的核心是水银开关,而水银对人体及环境均有害。火箭模型发射及飞行存在各种意外,如果飞行出现故障,火箭模型从高空坠落,造成系
统损坏,存在水银泄漏的危险。
[0010]
(2)空气动力控制对使用者的专业知识要求较高,需要建立数学模型,并结合动力参数、火箭模型飞行速度等参数和空气流体参数,进行流体力学分析和复杂数学计算。
[0011]
(3)空气动力控制方式结构复杂,制作难度大,成本比较高。
技术实现要素:
[0012]
有鉴于此,本实用新型提供了一种用于火箭模型的姿控变轨系统,通过采用单片机技术和模型火箭发动机技术相结合,实现了火箭模型的弹道变轨,并解决了水银开关式姿态变轨控制系统和空气动力控制系统的缺陷。
[0013]
本实用新型是通过下述技术方案实现的:
[0014]
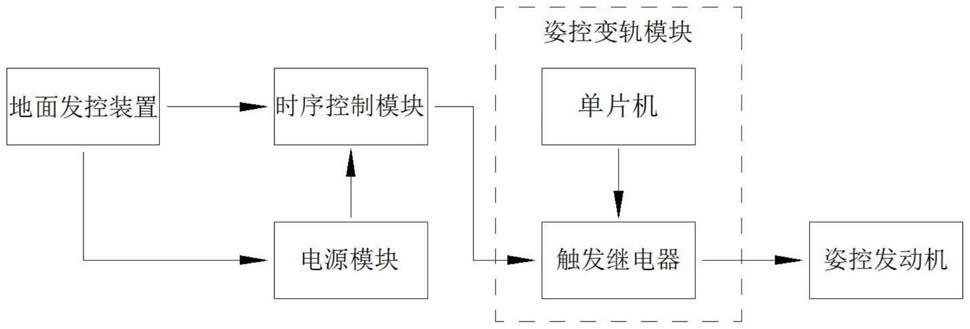
一种用于火箭模型的姿控变轨系统,包括:地面发控装置、时序控制模块、姿控变轨模块、电源模块及两个以上姿控发动机;所述姿控变轨系统集成在火箭模型上,两个以上姿控发动机位于火箭模型的质心上端;
[0015]
所述姿控变轨模块包括单片机和两个以上触发继电器;两个以上触发继电器与两个以上所述姿控发动机一一对应连接;
[0016]
所述电源模块用于给所述时序控制模块供电;
[0017]
所述地面发控装置用于给时序控制模块设置延时时序并给时序控制模块发送启动指令,同时控制电源模块是否给时序控制模块供电;
[0018]
所述时序控制模块接收到地面发控装置的启动指令后,根据设定的延时时序与姿控变轨模块的所有触发继电器导通,进而实现对触发继电器的通电;
[0019]
所述姿控变轨模块的单片机用于检测火箭模型的当前的角度姿态,并根据该角度姿态控制一个以上与姿控发动机对应的触发继电器闭合;当触发继电器处于通电且闭合的状态时,对应的姿控发动机点火,姿控发动机点火后产生径向推力,在该径向推力的作用下,火箭模型的姿态产生改变,实现火箭模型的变轨飞行。
[0020]
进一步的,两个以上姿控发动机呈圆周分布,且呈圆周布置的两个以上姿控发动机的圆心与火箭模型的质心均位于火箭模型的轴线上。
[0021]
有益效果:
[0022]
(1)由于本实用新型采用单片机和模型火箭发动机(姿控发动机属于模型火箭发动机的一种)相结合的方式来实现火箭模型的姿控变轨,不存在泄漏的危害,故而对人体和环境无害。
[0023]
(2)由于单片机技术和模型火箭发动机技术都很成熟,本实用新型只需要根据火箭模型的飞行流程理清逻辑关系,再根据逻辑关系进行单片机编程,因此避免了对专业知识和软件的需求。
[0024]
(3)由于单片机的集成度较高,因此本实用新型的结构也比较简单,只要根据各模块的尺寸进行相关结构设计,就可以将整个系统装入火箭模型。
附图说明
[0025]
图1为本实用新型的组成图;
[0026]
图2为本实用新型的布局示意图;
[0027]
图3为火箭模型的外形图;
[0028]
其中,2-姿控发动机,3-姿控变轨模块,4-时序控制模块。
具体实施方式
[0029]
下面结合附图并举实施例,对本实用新型进行详细描述。
[0030]
本实施例提供了一种用于火箭模型的姿控变轨系统,参见附图1,包括:地面发控装置、时序控制模块、姿控变轨模块、电源模块及两个以上姿控发动机;参见附图2,所述姿控变轨系统集成在火箭模型上,两个以上姿控发动机呈圆周分布于火箭模型的质心上端,且呈圆周布置的两个以上姿控发动机的圆心与火箭模型的质心均位于火箭模型的轴线上;
[0031]
所述姿控变轨模块包括单片机和两个以上触发继电器;
[0032]
所述地面发控装置分别通过地面发射电缆与时序控制模块及电源模块连接,所述时序控制模块分别通过信号电缆与姿控变轨模块的触发继电器的输入端及电源模块连接;两个以上所述姿控发动机与姿控变轨模块的触发继电器的输出端一一对应连接;
[0033]
所述电源模块用于给所述时序控制模块供电;
[0034]
所述地面发控装置用于给时序控制模块设置延时时序并给时序控制模块发送启动指令,同时控制电源模块是否给时序控制模块供电;
[0035]
所述时序控制模块用于对火箭模型的姿控变轨进行时序控制,接收到地面发控装置的启动指令后,根据设定的延时时序与姿控变轨模块的所有触发继电器导通,进而实现对触发继电器的通电;
[0036]
所述姿控变轨模块为核心部件,单片机用于检测火箭模型的当前的角度姿态,并根据该角度姿态控制一个以上与姿控发动机对应的触发继电器闭合(初始时,所有触发继电器均保持断开状态);当触发继电器处于通电且闭合的状态时,对应的姿控发动机点火,姿控发动机点火后产生径向推力,且由于姿控发动机位于火箭模型的质心上端,因此在该径向推力的作用下,火箭模型的姿态产生改变,从而实现火箭模型的变轨飞行。
[0037]
工作时,将所述姿控变轨系统集成在火箭模型上,并完成所有发射准备工作,打开手持式的地面发控装置,在地面发控装置的面板上设置姿控变轨模块的延时时序,设置结束后,通过电源模块给时序控制模块充电,充电结束后,按地面发控装置面板上的发射按钮,火箭模型点火起飞,同时地面发控装置给时序控制模块发送启动指令;姿控变轨模块单片机检测火箭模型当前的角度姿态(即倾斜角度a),参见附图3,并根据该角度姿态控制一个以上与姿控发动机对应的触发继电器闭合,当到达时序控制模块的延时时序的第一个时间点时,给姿控变轨模块的所有触发继电器通电;处于通电且闭合的状态的触发继电器对应的姿控发动机点火,姿控发动机点火后产生径向推力,在该径向推力的作用下,火箭模型的姿态产生改变,从而实现火箭模型的变轨飞行。
[0038]
综上所述,以上仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1