一种自动袜机袜筒翻转装置的制作方法
1.本实用新型涉及袜机技术领域,具体为一种自动袜机袜筒翻转装置。
背景技术:
2.袜机是采用机电一体化技术编织袜身、花纹和缝合袜头的现代针织设备,具有较高的智能化和自动化程度,广泛应用于针织行业中。一般在袜身编织完成后,袜头部位是留有开口的,需要对袜头的开口进行缝合,而为了隐藏针脚和线头,需要对袜身翻面再进行缝合袜头。目前袜机多采用翻袜筒进行袜身的翻面操作,在现有的智能袜机中,翻袜筒常采用气缸驱动以实现自身的升降,但是,由于气缸的行程固定且难以达到足够长的行程,易导致翻袜不充分的后果。
技术实现要素:
3.本实用新型的目的是针对上述背景技术中存在的问题,提供一种自动袜机袜筒翻转装置,通过对翻袜筒设置两段式的升降驱动方式,使翻袜筒可以进行两端行程,保证翻袜筒在对各种袜子进行翻袜时均可以达到足够行程,避免翻袜不充分情况的发生。
4.为了实现上述目的,本实用新型采用了以下技术方案:
5.一种自动袜机袜筒翻转装置,包括基座、底座和用于驱动翻袜筒升降的驱动组件,基座设有限制套筒,限制套筒的筒腔上下贯穿所述基座,翻袜筒位于限制套筒的筒腔中;驱动组件包括第一驱动机构、升降基座和第二驱动机构,翻袜筒直接连接第一驱动机构,第二驱动机构设于基座与底座之间,第一驱动机构通过升降基座连接第二驱动机构,第二驱动机构带动升降基座继而带动第一驱动机构作升降运动。
6.优选的,第一驱动机构包括伺服电动缸和推杆,推杆同时固定连接翻袜筒和伺服电动缸的活塞杆。
7.优选的,第二驱动机构包括伺服电机和升降传动结构,伺服电机固定设于底座,升降传动结构包括丝杆、套设于所述丝杆上的螺母座和滑动导杆,丝杆由伺服电机驱动旋转,螺母座与升降基座固定连接,且升降基座与滑动导杆滑动连接。
8.优选的,滑动导杆的数量为三个,三个滑动导杆呈三角形分布,且三个滑动导杆所形成的三角形的重心位于限制套筒的轴心线上。
9.优选的,丝杆的两端部分别与基座和底座旋转连接,丝杆通过齿轮传动结构连接伺服电机,齿轮传动结构包括主动齿轮和从动齿轮,主动齿轮固定连接伺服电机的转轴,从动齿轮固定连接丝杆端部,齿轮传动结构内设于底座中。
10.优选的,基座上设有用于控制第二驱动机构停机的触发钮,触发钮位于基座下侧,升降基座上升至最高位置后接触并挤压所述触发钮。
11.与现有技术相比,采用了上述技术方案的自动袜机袜筒翻转装置,具有如下有益效果:
12.直接与翻袜筒连接的伺服电动缸可以驱动翻袜筒在一定行程范围内升降,同时伺
服电动缸又通过升降传动结构与伺服电机建立传动关系,伺服电机驱动伺服电动缸在一定行程范围内升降,使得翻袜筒可以进行两段行程的运动,伺服电机带动翻袜筒上升至最上端时,若袜身没有被翻面完全,还可以通过伺服电动缸驱动翻袜筒继续上升,以使袜身完全翻面,有效避免翻袜不充分的情况。
附图说明
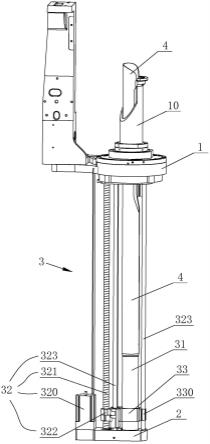
13.图1为本实用新型自动袜机袜筒翻转装置实施例的结构示意图。
14.图2为本实施例中伺服电机驱动翻袜筒上升至最终状态的示意图。
15.图3为本实施例中伺服电动缸驱动翻袜筒上升的示意图。
16.图4为本实施例中滑动导杆的分布示意图。
17.图5为本实施例中齿轮传动结构的结构示意图。
18.附图标记:1、基座;10、限制套筒;2、底座;3、驱动组件;31、第一驱动机构;310、伺服电动缸;311、推杆;32、第二驱动机构;320、伺服电机; 321、丝杆;322、螺母座;323、滑动导杆;33、升降基座;330、滑座;34、齿轮传动结构;340、主动齿轮;341、从动齿轮;4、翻袜筒。
具体实施方式
19.下面结合附图对本实用新型做进一步描述。
20.如图1至图5所示的自动袜机袜筒翻转装置,包括基座1、底座2和用于驱动翻袜筒4升降的驱动组件3,基座1设有限制套筒10,限制套筒10由基座 1上表面向上延伸,限制套筒10的筒腔上下贯穿基座1,翻袜筒4位于限制套筒10的筒腔中,翻袜筒4可在筒腔中作轴向升降运动,底座2位于基座1下方,驱动组件3位于基座1和底座2之间。
21.驱动组件3包括第一驱动机构31、升降基座33和第二驱动机构32,第一驱动机构31包括伺服电动缸310和推杆311,推杆311同时固定连接翻袜筒4 和伺服电动缸310的活塞杆,伺服电动缸310与升降基座33固定连接。
22.第二驱动机构32包括伺服电机320和升降传动结构,伺服电机320固定设于底座2,升降传动结构包括丝杆321、套设于丝杆321上的螺母座322和三个滑动导杆323,螺母座322与升降基座33固定连接,丝杆321由伺服电机320 驱动旋转,丝杆321的两端部分别与基座1和底座2旋转连接,丝杆321通过齿轮传动结构34连接伺服电机320,齿轮传动结构34包括主动齿轮340和从动齿轮341,主动齿轮340固定连接伺服电机320的转轴,从动齿轮341固定连接丝杆321端部,齿轮传动结构34内设于底座2中。
23.三个滑动导杆323呈等腰三角形分布,且三个滑动导杆323所形成的三角形的重心位于限制套筒10的轴心线上,其中距离较近的两个滑动导杆323靠近丝杆321设置,另一个滑动导杆323相对远离丝杆321设置。升降基座33对应三个滑动导杆323的位置设有三个滑座330,三个滑座330分别可滑动地套设于三个滑动导杆323上。
24.基座1还设有用于控制伺服电机320停机的触发钮,触发钮位于基座1下侧,升降基座33上升至最高位置后接触并挤压所述触发钮,当升降基座33触碰触发钮时,伺服电机320暂时停机。
25.实际工作时,首先伺服电机320启动但伺服电动缸310未启动,伺服电机320驱动丝杆321旋转,使升降基座33带动伺服电动缸310以及翻袜筒4共同上升,当翻袜筒4上升至最
上端时,升降基座33触碰触发钮,伺服电机320暂时停机,翻袜筒4暂时停止上升,若此时袜身没有被翻面完全,则伺服电动缸 310启动,伺服电动缸310的活塞杆带动翻袜筒4继续上升一端距离,以使袜身完全翻面。
26.以上是本实用新型的优选实施方式,对于本领域的普通技术人员来说不脱离本实用新型原理的前提下,还可以做出若干变型和改进,这些也应视为本实用新型的保护范围。
技术特征:
1.一种自动袜机袜筒翻转装置,其特征在于:包括基座(1)、底座(2)和用于驱动翻袜筒(4)升降的驱动组件(3),基座(1)设有限制套筒(10),限制套筒(10)的筒腔上下贯穿所述基座(1),翻袜筒(4)位于限制套筒(10)的筒腔中;驱动组件(3)包括第一驱动机构(31)、升降基座(33)和第二驱动机构(32),翻袜筒(4)直接连接第一驱动机构(31),第二驱动机构(32)设于基座(1)与底座(2)之间,第一驱动机构(31)通过升降基座(33)连接第二驱动机构(32),第二驱动机构(32)带动升降基座(33)继而带动第一驱动机构(31)作升降运动。2.根据权利要求1所述的自动袜机袜筒翻转装置,其特征在于:第一驱动机构(31)包括伺服电动缸(310)和推杆(311),推杆(311)同时固定连接翻袜筒(4)和伺服电动缸(310)的活塞杆。3.根据权利要求1所述的自动袜机袜筒翻转装置,其特征在于:第二驱动机构(32)包括伺服电机(320)和升降传动结构,伺服电机(320)固定设于底座(2),升降传动结构包括丝杆(321)、套设于所述丝杆(321)上的螺母座(322)和滑动导杆(323),丝杆(321)由伺服电机(320)驱动旋转,螺母座(322)与升降基座(33)固定连接,且升降基座(33)与滑动导杆(323)滑动连接。4.根据权利要求3所述的自动袜机袜筒翻转装置,其特征在于:滑动导杆(323)的数量为三个,三个滑动导杆(323)呈三角形分布,且三个滑动导杆(323)所形成的三角形的重心位于限制套筒(10)的轴心线上。5.根据权利要求3所述的自动袜机袜筒翻转装置,其特征在于:丝杆(321)的两端部分别与基座(1)和底座(2)旋转连接,丝杆(321)通过齿轮传动结构(34)连接伺服电机(320),齿轮传动结构(34)包括主动齿轮(340)和从动齿轮(341),主动齿轮(340)固定连接伺服电机(320)的转轴,从动齿轮(341)固定连接丝杆(321)端部,齿轮传动结构(34)内设于底座(2)中。6.根据权利要求1所述的自动袜机袜筒翻转装置,其特征在于:基座(1)上设有用于控制第二驱动机构(32)停机的触发钮,触发钮位于基座(1)下侧,升降基座(33)上升至最高位置后接触并挤压所述触发钮。
技术总结
本实用新型公开了一种翻袜筒的自动袜机袜筒翻转装置,通过对翻袜筒设置两段式的升降驱动方式,使翻袜筒可以进行两端行程,保证翻袜筒在对各种袜子进行翻袜时均可以达到足够行程,避免翻袜不充分情况的发生。其技术方案要点是:包括基座、底座和用于驱动翻袜筒升降的驱动组件,基座设有限制套筒,限制套筒的筒腔上下贯穿所述基座,翻袜筒位于限制套筒的筒腔中;驱动组件包括第一驱动机构、升降基座和第二驱动机构,翻袜筒直接连接第一驱动机构,第二驱动机构设于基座与底座之间,第一驱动机构通过升降基座连接第二驱动机构,第二驱动机构带动升降基座继而带动第一驱动机构作升降运动。运动。运动。
技术研发人员:赵月均 陈超 胡培贤
受保护的技术使用者:浙江凯强轻纺机械有限公司
技术研发日:2022.03.11
技术公布日:2022/9/19
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1