永磁全向轮机器人底盘的制作方法
1.发明涉及机器人领域,特别是涉及一种永磁全向轮机器人底盘。
背景技术:
2.国内研制的金属物体检测机器人底盘多为履带式或永磁体镶嵌在车体的爬壁机器人。
3.这些传统的机器人大多存在着体积过大、转向困难、容易金属物体造成损坏的缺点,无法真正意义上实现对金属物体清洁、安全、稳定、快速的检定。
4.为此研制了一款四轮驱动与金属物体非接触的永磁全向轮机器人底盘,以实现对大型金属物体的清洁、安全检测和精确标定。
5.永磁全向轮机器人底盘车采用永磁全向轮、四轮独立驱动方式,四轴四差速机构.使用独特的干耦合轮型探头,无需耦合剂,永磁全向轮机器人底盘能够垂直、平行、倒退爬行,这些都不会影响系统的正常功能。
6.永磁全向轮机器人底盘采用四轮驱动的四轴四差速机构方式,由四个直流电机分别为四个轮子提供驱动力,这样每个轮子转速的调节变化不受其它轮子的影响,很容易实现底盘的转向等运动姿态的变化。
7.永磁全向轮机器人底盘的无线控制系统与有线同轴电缆控制系统,使用户不需要搭建脚手架,永磁全向轮机器人底盘就可以到达大型金属结构物体上大多数的位置,从而实现对大型金属物体的清洁、安全检测和精确标定。
8.永磁全向轮机器人底盘采用有线、无线遥控、控制模式,在该模式下,永磁全向轮机器人底盘每移动一步都需要遥控器发出指令。
9.同时,在上述任何一种模式下,为了防止意外,遥控器随时可以控制永磁全向轮机器人底盘紧急停车。
10.为了帮助操作人员更好操作,永磁全向轮机器人底盘的前部和尾部分别安装了一个摄像头,画面可以通过无线模块传输到地面的显示器上显示出来。
技术实现要素:
11.本实用新型针对上述现有技术的不足与缺陷,为此,研制了一款四轮驱动的与金属物体非接触永磁全向轮机器人底盘,以实现对大型金属物体的清洁、安全检测和精确标定。
12.本实用新型是通过以下技术方案实现的,本实用新型包括:底盘箱、驱动电机、永磁全向轮、联轴器、底盘箱内部设置有永磁全向轮驱动板、电源模块、控制模块、扩展板、麦克纳姆轮小车遥控器。
13.所述永磁全向轮机器人底盘,设有四个永磁全向轮,四只永磁全向轮转动用于永磁全向轮机器人底盘的移动与转弯运动。
14.永磁全向轮机器人底盘的全向轮的辊轮为永磁体辊轮,永磁体辊轮外设有高分子
橡胶保护层。
15.永磁全向轮机器人底盘对接上不同机械设备与仪器应用,就是不同用途的产品。
16.永磁全向轮机器人底盘分别安装联接检测仪器与空化射流清洗机喷嘴,由检测仪器对大型金属物体的安全检测、探伤和精确标定,由空化射流清洗机完成对金属类物体进行快速的清洁工作。
17.永磁全向轮机器人底盘采用永磁全向轮、四轮独立驱动方式,四轴四差速机构.使用独特的干耦合轮型接头,无需耦合剂。爬行器能够垂直、平行、倒退爬行,这些都不会影响系统的正常功能。
18.无线控制系统与有线同轴电缆系统,使用户不需要搭建脚手架就可以到达各类钢结构上大多数的位置,实现对大型金属物体的清洁、安全检测探伤和精确标定。
19.永磁全向轮机器人底盘的永磁全向轮表面加上一层丁氰橡胶,丁氰橡胶具有良好的抗氟、耐油、耐溶剂、耐酸碱、耐老化等优点,这样改进后的丁氰橡胶刚性轮既不容易对罐壁造成损害,又因为表面的防滑橡胶增加了摩擦力而保证了轮子的承载能力,为永磁全向轮机器人底盘的安全运行提供了保证。
20.外设电脑同轴电缆联接扩展板,用于磁全向轮机器人底盘控制及信息存储。
21.外接脐带电缆电源线插头联接电源模块。
22.永磁全向轮机器人底盘控制采用南京帝淮电子科技有限公司麦克纳姆轮小车遥控器,型号:dhl
‑
dk系列
[0023] 南京帝淮麦克纳姆轮小车遥控器说明
[0024] 麦克纳姆轮小车可以向各个方向行走即可全方位移动,可以实现前行、横移、斜行、旋转及其组合等运动方式。原理基于多个轮子位于机轮周边的轮轴的中心轮上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。
[0025]
依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。
[0026]
基于麦克纳姆轮的小车如麦克纳姆轮叉车、麦克纳姆轮全方位运输平台小车等,非常适合转运空间有限、作业通道狭窄的各种工况环境,降低人力成本等方面效果显著。
[0027]
一、麦克纳姆轮小车遥控器产品简介:
[0028]
1. 每套遥控器分2部分,发射部分包含1个发射器;接收器部分含1个接收器,多套遥控器处同一场地工作不会相互干扰。
[0029]
2. 遥控系统(主控执行器)提供10路动作开关量,另有启动+急停共同对应1路开关量;12路模拟量0
‑
5v。
[0030]
3. 功能键之间逻辑关系:急停采用蘑菇头旋转式,自锁模式;三位拨杆,左中右三位,三位自锁模式,中间为零位。1号四方向模拟量比例杆前后左右机械式互锁,自复位模式,2号8方向摇杆共有8个执行方向,自复位模式。
[0031]
4. 电源指示灯及文字标注:动作执行亮绿灯,电源没电或急停按下后再按动作按钮亮红灯,按钮文字标识可按需标注定做。
[0032]
5. 安全性:遥控系统带急停蘑菇头式按钮,出现紧急情况可拍下急停按钮,可瞬间切断被控端总电源以及关闭遥控系统,确保执行安全。且遥控系统内置自侦测电路,当遥
控系统故障或继电器未能正常执行动作,则遥控器系统可自我急停,主动切断主继电器,被控端设备断电,遥控系统关机,确保作业安全。
[0033]
6. 接收器输出触点切换能力:交流250v/5a ;直流30v/5a。
[0034]
7. 防护防尘等级:ip65。
[0035]
8. 接收器工作电压:交流220v、交流380v、交流36v、直流24v、直流48v。
[0036]
9. 使用环境温度:
‑
35~+75℃。
[0037]
10. 天线,发射机天线可为内置或外置,接收机天线一般为外置。
[0038]
二、麦克纳姆轮小车遥控器发射器参数:发射器:频率范围:433mhz或315mhz、遥控距离:100米、密码保护:65336亿组、天线形式:外置式/内藏式/吸盘式、防护等级:ip65、使用电源: dc12v或24v可定制、环境温度:
‑
35℃~+75℃、
[0039]
三、麦克纳姆轮小车遥控接收器参数:频率范围:433mhz或315mhz、接收灵敏度:
‑
100dbm、密码保护:65336亿组、天线形式:外置式、防护等级:ip65、使用电源:dc12v或24v可定制、环境温度:
‑
35℃~+75℃
[0040]
本实用新型永磁全向轮机器人底盘:
[0041]
永磁全向轮机器人底盘采用四轮差动力平台,四轮差动力平台的永磁向轮的辊轮为永磁体辊轮,永磁体辊轮外设有高分子橡胶保护层。
[0042]
永磁全向轮机器人底盘是基础型的小型机器人平台,提供一个完整、多接口、高可靠性的移动机器人系统,是四轮45度全向轮轮系的机器人平台,永磁全向轮与传统轮系相比,能够实现平移、自转、平移并自转等特殊运动。
[0043]
永磁全向轮机器人底盘采用整体铝合金铸造成型工艺,使用四台大功率的直流驱动电机作为驱动,支持can总线及rs232接口。
[0044]
开发包向用户提供完整的设备通信协议以及基于stm32f407的示例与演示程序源码,使用户能够对永磁全向轮底盘快速上手。
[0045]
永磁全向轮机器人底盘特性:
[0046]
全方向自由移动、四轮独立悬挂、铝合金整体成型底盘、工业级全向轮、4台直流驱动电机、永磁麦克纳姆轮驱动轮、额定负载能力100kg、最大移动速度1.35m/s、最大自转速度160
°
/s、最小转弯半径0m。
[0047]
永磁全向轮机器人底盘是四主动轮差动轮系统的永磁全向轮底盘,使用永磁式麦克纳姆轮,配置强劲的驱动系统,能够适应各种应用环境,并能高性能地实现各种运动。
[0048]
完整的设备通信协议以及基于stm32f407的示例与演示程序源码,使用户能够对永磁全向轮底盘快速上手。
[0049]
本实用新型外设备空化射流清洗机为青岛炬荣工程科技有限公司的炬40kw高压清洗机水下空化射流清洗机机器性能参数:品牌:炬荣、型号:jr
‑
cvps40、工作压力:0
‑
20mpa,压力:20mpa、理论流量:106升/分、配套动力:40kw电机55马力汽油机、机器转速:1450转/分、配套泵头:不锈钢泵头、包装尺寸:180*165*168cm、重量:净重/毛重550/682kg 高压泵头的性能参数:泵头的压力:24mpa、工作压力: 20mpa、流量:106升/分。
[0050]
永磁全向轮机器人底盘设置了用于联接检测仪器卡子,用于检测仪器与空化射流清洗机喷嘴联接固定。
[0051]
检测仪器卡子联接检测仪器时,检测仪器卡子设置有螺丝孔,先将螺丝穿过检测
仪器卡子上的螺丝孔,在将螺丝对准底盘车内丝栽丝螺孔拧紧螺丝,完成检测仪器卡子与底盘车联接固定。
[0052]
检测仪器与检测仪器卡子联接时,先将检测仪器放入检测仪器卡子固定圈内夹紧,在将固定锣丝两头锣帽的拧紧,从而达到将检测探伤仪器与永磁全向轮底盘车联接固定。
[0053]
空化射流清洗机喷嘴与检测仪器卡子联接时,先将空化射流清洗机喷嘴放入检测仪器卡子固定圈内夹紧,在将固定锣丝两头锣帽的拧紧,完成检测仪器及空化射流清洗机喷嘴与底盘的联接固定。
[0054]
永磁全向轮机器人底盘分别安装联接检测仪器与空化射流清洗机喷嘴,由检测仪器对大型金属物体的安全检测、探伤和精确标定,由空化射流清洗机完成对金属类物体进行快速的清洁工作。
[0055]
永磁全向轮机器人底盘为密封防水车体,可下潜20米。
[0056]
外设设备:空化射流清洗机。
[0057]
外设置控制电脑。
[0058]
与现有技术相比,本实用新型永磁全向轮机器人底盘具有如下效果:
[0059]
本实用新型永磁全向轮机器人底盘,吸附体与金属体非接触的永磁全向轮机器人底盘,可以搭载其它仪器用于金属类物体进行快速的检定、清洁、安全的检测。
[0060]
永磁全向轮机器人底盘接上不同机械设备与仪器应用就是不同用途的产品。用户可以通过串联或并联的方式进行组合,实现具备不同载重、适应多元化场景的永磁全向轮机器人底盘。
[0061]
永磁全向轮机器人底盘为密封防水车体,可下潜20米。
附图说明
[0062]
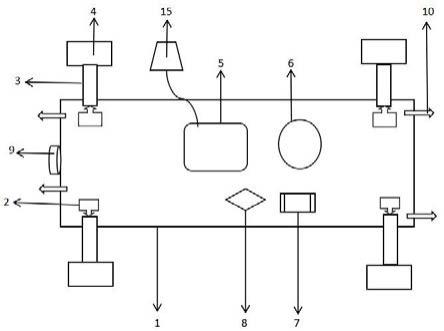
图1是整体结构图。
[0063]
图2是局部结构图。
[0064]
图3是局部结构图。
[0065]
图4是局部结构图。
[0066]
图5是局部结构图。
[0067]
图6是局部结构图。
[0068]
图7是局部结构图。
[0069]
图中:底盘箱(1)、永磁全向轮驱动电机(2)、联轴器(3)、永磁全向轮(4)、电源模块(5)、永磁麦克纳姆轮l293d4驱动板(6)、328扩展板(7)、永磁麦克纳姆轮小车遥控器接收器(8)、检测仪器卡子(9)、监控摄像机(10)、第一固定螺丝(11)、第二固定螺丝(12)、永磁体辊轮(13)、麦克纳姆轮小车遥控器(14)、外接脐带电缆电源线插头(15)、底盘螺丝孔(16)。.
具体实施方式
[0070]
下面结合附图对本实用新型永磁全向轮机器人底盘的技术方案实施详细说明:本实用新型磁全向轮机器人底盘技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型永磁全向轮机器人底盘的保护范围不限于下述的实施例。
[0071]
如图所示永磁全向轮机器人底盘其特征在于包括:底盘箱(1)、永磁全向轮驱动电机(2)、联轴器(3)、全向永磁轮(4)、电源模块(5)、永磁麦克纳姆轮l293d4驱动板(6)、328扩展板(7)、麦克纳姆轮小车遥控器接收器(8)、检测仪器卡子(9)、监控摄像机(10)、第一固定锣丝(11)、第二固定锣丝(12)、永磁体辊轮(13)、麦克纳姆轮小车遥控器(14)、外接脐带电缆电源插头(15)、底盘螺丝孔(16),底盘箱(1)安装固定永磁全向轮驱动电机(2)、永磁全向轮驱动电机(2)联接联轴器(3)、联轴器(3)联接永磁全向轮(4),底盘箱(1)安装固定电源模块(5)、永磁麦克纳姆轮l293d4电机驱动板(6)、328扩展板(7)、麦克纳姆轮小车遥控器接收器(8)、监控摄像机(10),电源模块(5)线路联接永磁全向麦克纳姆轮l293d4路电机驱动板(6)、麦克纳姆轮小车遥控器接收器(8)、监控摄像机(10),永磁全向麦克纳姆轮l293d4驱动板(6)线路联接永磁全向轮驱动电机(2),永磁麦克纳姆轮l293d4驱动板(6)线路联接328扩展板(7)、328扩展板(7)线路联麦克纳姆轮小车遥控器接收器(8)、麦克纳姆轮小车遥控器接收器(8)无线联接麦克纳姆轮小车遥控器(14),328扩展板(7)线路联接监控摄像机(10),328扩展板(7)线路联接外设电脑,外接脐带电缆电源线插头(15)线路联接电源模块(5),底盘(1)安装设置检测仪器卡子(9),第一固定螺丝(11)穿过检测仪器卡子(9)的螺丝孔,对准底盘箱(1)的底盘螺丝孔(16),拧紧第一固定螺丝(11)完成检测仪器卡子(9)同底盘(1)的联接固定,将检测仪器及空化射流清洗机喷嘴放入检测仪器卡子(9)固定圈内夹紧,将第二固定螺丝(12)两头螺帽的拧紧,从而达到将检测仪、及空化射流清洗机喷嘴联接固定在底盘箱(1)上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1