夹爪装置的制作方法
1.本技术涉及机械技术领域,特别是涉及一种夹爪装置。
背景技术:
2.夹爪常用来夹持转移机械工件。一般地,夹爪包括壳体、连杆和夹爪臂。连杆穿设于壳体,且能够相对于壳体滑动。夹爪臂与连杆活动连接,且能够在连杆的带动下运动而实现夹持作用。由于连杆与壳体相对滑动,使得难以实现壳体的密闭性,难以保证壳体内部的部件与外界环境的隔离,对壳体内部的部件的防护效果较差。
技术实现要素:
3.鉴于此,有必要提供一种对壳体内部的部件的防护效果较好的夹爪装置。
4.为解决上述技术问题,本技术提供了一种夹爪装置,包括:
5.壳体;及
6.多个夹爪单元,每个所述夹爪单元包括设置在所述壳体外部的连杆组件和收容于所述壳体内的转动组件,所述连杆组件包括夹爪臂、第一连杆和与所述第一连杆间隔设置的第二连杆,所述第一连杆和所述第二连杆均转动连接所述夹爪臂和所述壳体,所述第二连杆转动带动所述夹爪臂运动,所述夹爪臂运动带动所述第一连杆转动,从而使每个所述夹爪单元的所述夹爪臂相互靠近或相互远离,所述转动组件包括与所述第二连杆转动连接的第一转动件和与所述第一转动件转动连接的第二转动件,所述第二转动件转动带动所述第一转动件转动,所述第一转动件转动带动所述第二连杆转动。
7.上述夹爪装置包括壳体和多个夹爪单元,每个夹爪单元的连杆组件包括夹爪臂、第一连杆和与第一连杆间隔设置的第二连杆,夹爪臂与壳体转动连接,第一连杆和第二连杆均转动连接夹爪臂和壳体,每个夹爪单元的转动组件包括与第二连杆转动连接的第一转动件和与第一转动件转动连接的第二转动件,第二转动件能够转动,以带动第一转动件转动,而带动第二连杆转动,使夹爪臂运动,然后带动第一连杆转动,而使各个夹爪单元的夹爪臂相互靠近或者相互远离,从而实现夹爪装置的夹持功能,并且,将连杆组件设置在壳体的外部,且通过第一连杆和第二连杆而与壳体转动连接,将转动组件收容于壳体的内部,且通过第一转动件而与第二连杆转动连接,使得能够在第一连杆和第二连杆均与壳体相对转动的情况下实现夹爪装置的夹持功能,有利于实现壳体的密闭性,以保证壳体内部的部件与外界环境的相对隔离,对壳体内部的部件的防护效果较好。
8.在其中一个实施例中,所述壳体具有相对的第一端和第二端,每个所述夹爪单元中,所述第一连杆和所述第二连杆沿所述第一端靠近所述第二端的方向依次间隔排列。
9.在其中一个实施例中,以所述第一端靠近所述第二端的方向为中心轴,多个所述夹爪单元环绕所述中心轴设置。
10.在其中一个实施例中,每个所述夹爪单元还包括转轴,所述转轴转动地穿设所述第一转动件、所述壳体和所述第二连杆,以转动连接所述壳体和所述第二连杆,且转动连接
所述第二连杆和所述第一转动件。
11.在其中一个实施例中,每个所述夹爪单元中,所述第二连杆的一端与所述夹爪臂转动连接,另一端与所述壳体及所述第一转动件均铰接。
12.在其中一个实施例中,每个所述夹爪单元还包括密封件,所述密封件夹持于所述转轴和所述壳体之间。
13.在其中一个实施例中,所述转轴与所述第一转动件键连接,所述转轴与所述第二连杆键连接。
14.在其中一个实施例中,所述第二连杆的转动方向与所述第一转动件的转动方向相同,所述第二转动件的转动方向与所述第一转动件的转动方向相反。
15.在其中一个实施例中,还包括驱动单元,所述驱动单元能够驱动每个所述夹爪单元的所述第二转动件转动。
16.在其中一个实施例中,所述驱动单元包括传动件,所述传动件与每个所述夹爪单元的所述第二转动件转动连接,所述传动件能够向靠近或者远离所述第二连杆的方向运动,以带动每个所述夹爪单元的所述第二转动件转动。
附图说明
17.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
18.图1为第一实施方式的夹爪装置的结构示意图;
19.图2为图1所示的夹爪装置的另一状态的结构示意图;
20.图3为图1所示的夹爪装置的局部分解图;
21.图4为图1所示的夹爪装置沿
ⅳ-ⅳ
线的截面示意图;
22.图5为图2所示的夹爪装置的另一状态的结构示意图;
23.图6为第二实施方式的夹爪装置的结构示意图;
24.图7为图6所示的夹爪装置的局部分解图;
25.图8为图6所示的夹爪装置沿i-i线的截面示意图。
具体实施方式
26.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。
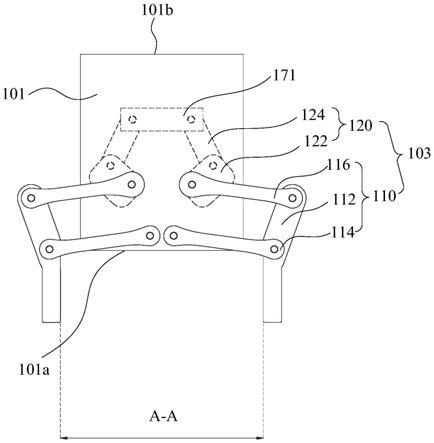
27.如图1所示,第一实施方式的夹爪装置100的壳体101具有较好的密闭性,能够保证壳体101内部的部件与外界环境的相对隔离,对壳体101内部的部件的防护效果较好。
28.请参阅图2,具体地,该夹爪装置100包括壳体101和多个夹爪单元103。每个夹爪单元103包括设置在壳体101外部的连杆组件110和收容于壳体101内的转动组件120。连杆组件110包括夹爪臂112、第一连杆114和与第一连杆114间隔的第二连杆116。第一连杆114和第二连杆116均转动连接夹爪臂112和壳体101。第二连杆116能够转动,以带动夹爪臂112运动而带动第一连杆114转动,然后使各个夹爪单元103的夹爪臂112相互靠近或者相互远离。转动组件120包括与第二连杆116转动连接的第一转动件122和与第一转动件122转动连接
的第二转动件124。第二转动件124能够转动,以带动第一转动件122转动,而带动第一连杆114转动。
29.上述夹爪装置100中,第二转动件124能够转动,以带动第一转动件122转动,而带动第二连杆116转动,然后带动第一连杆114转动,以带动夹爪臂112运动而带动第一连杆114转动,然后使各个夹爪单元103的夹爪臂112相互靠近或者相互远离,从而实现夹爪装置100的夹持功能,并且,将连杆组件110设置在壳体101的外部,且通过第一连杆114和第二连杆116而与壳体101转动连接,将转动组件120收容于壳体101的内部,且通过第一转动件122而与第二连杆116转动连接,使得能够在第一连杆114和第二连杆116均与壳体101相对转动的情况下实现夹爪装置100的夹持功能,有利于提高壳体101的密闭性,以保证壳体101内部的部件与外界环境的相对隔离,对壳体101内部的部件的防护效果较好。
30.壳体101具有相对的第一端101a和第二端101b。进一步地,壳体101的形状大致为条形。壳体101自第一端101a向第二端101b延伸。
31.请参阅图3,在图示实施例中,壳体101的形状大致为长方体形。壳体101具有第一壳部101c和第二壳部101d。第二壳部101d能够盖设于第一壳部101c上,以与第一壳部101c配合形成壳体101。需要说明的是,第一壳部101c和第二壳部101d可以为一体成型结构,可以为可拆卸地连接。
32.在其中一个实施例中,以第一端101a靠近第二端101b的方向为中心轴,多个夹爪单元103环绕中心轴设置。进一步地,多个夹爪单元103环绕中心轴间隔设置。在图示实施例中,夹爪单元103有两个。两个夹爪单元103沿中心轴对称设置。
33.夹爪臂112用于夹持工件。进一步地,夹爪臂112具有第一支臂112a和第二支臂112b。第一支臂112a的一端与第二支臂112b的一端连接。第一支臂112a和第二支臂112b呈相交设置,以使夹爪臂112呈弧形。通过使夹爪臂112呈弧形,有利于夹爪臂112在夹持工件的过程中发生干涉,保证夹爪装置100的正常使用。在图示实施例中,两个夹爪臂112的第二支臂112b大致平行。
34.每个夹爪单元103中,第一连杆114和第二连杆116沿第一端101a靠近第二端101b的方向依次间隔排列。第一连杆114靠近第一端101a设置。此种设置使得夹爪臂112、第一连杆114、第二连杆116和壳体101配合形成连杆机构。
35.进一步地,每个夹爪单元103中,第一连杆114的一端与壳体101铰接,另一端与夹爪臂112转动连接。第二连杆116的一端与壳体101铰接,另一端与夹爪臂112转动连接。更进一步地,第一连杆114与夹爪臂112的转动连接方式为铰接。第二连杆116与夹爪臂112的转动连接方式为铰接。
36.在图示实施例中,相邻两个第一连杆114的靠近壳体101的一端间隔设置。第一连杆114的两端分别具有第一避位缺口114a和第二避位缺口114b。第一支臂112a的靠近第二支臂112b的一端部分收容于第一避位缺口114a内,且与第一连杆114铰接。壳体101部分收容于第二避位缺口114b内,且与第一连杆114铰接。第二连杆116的两端分别设有第一避位槽116a和第二避位糟116b。第一支臂112a的远离第二支臂112b的一端部分收容第一避位槽116a内,且与第二连杆116铰接。壳体101的远离第一连杆114的一端部分收容于第二避位槽内,且与第二连杆116铰接。每个夹爪单元103中,第一连杆114和第二连杆116大致平行。
37.请参阅图4,第一转动件122与第二连杆116铰接。进一步地,每个夹爪单元103还包
括转轴130。转轴130转动地穿设第一转动件122、壳体101和第二连杆116,以转动连接壳体101和第二连杆116,且转动连接第二连杆116和第一转动件122。更进一步地,第二连杆116的转动方向与第一转动件122的转动方向相同。具体地,每个夹爪单元103还包括轴承140。轴承140套设于转轴130,且夹持于转轴130和壳体101之间。转轴130与第一转动件122键连接,转轴130与第二连杆116键连接。
38.在图示实施例中,第一转动件122的形状大致为条形。转轴130转动地穿设第一转动件122的一端、壳体101和第二连杆116的远离夹爪臂112的一端。每个夹爪单元103还包括第一键150a和第二键150b。第一键150a键连接第二连杆116和转轴130。第一键150a键连接第一转动件122和转轴130。
39.进一步地,每个夹爪单元103还包括密封件160。密封件160夹持于转轴130和壳体101之间。通过在转轴130和壳体101之间密封件160,能够保证壳体101的密闭性,以较好地隔离壳体101内部的部件与外界环境,以提高对壳体101内部的部件的防护效果。在图示实施例中,密封件160为密封圈。密封件160套设于转轴130,且夹持于转轴130和壳体101之间。需要说明的是,密封件160不限于为密封圈,也可以为本领城中其他的密封件,例如可以为密封胶等。
40.请再次参阅图3,第二转动件124的转动方向与第一转动件122的转动方向相反。进一步地,第二转动件124与第一转动件122铰接。在图示实施例中,第二转动件124的形状大致为条形。第二转动件124的一端与第一转动件122的远离第二连杆116的一端铰接。
41.夹爪装置100还包括驱动单元(图未标)。驱动单元能够驱动每个夹爪单元103的第二转动件124转动。进一步地,驱动单元包括传动件171。传动件171与每个夹爪单元103的第二转动件124转动连接。传动件171能够向靠近或者远离第二连杆116的方向运动,以带动每个夹爪单元103的第二转动件124转动。在图示实施例中,传动件171为条形。传动件171的两端分别与两个第二转动件124的远离第一转动件122的一端铰接。
42.进一步地,驱动单元还包括设置在传动件171上的驱动器(图未示)。驱动器能够驱动传动件171向靠近或者远离第二连杆116的方向运动。
43.上述夹爪装置100的操作过程如下:
44.请再次参阅图2,第一连杆114的延伸方向和第一连杆114的延伸方向均与壳体101的延伸方向大致垂直。此时,夹爪装置100处于第一夹持范围a-a。
45.开启驱动器,以驱动传动件171向靠近第二连杆116的方向运动,以推动每个夹爪单元103的第二转动件124朝靠近第二端101b的方向转动,以带动每个第一转动件122朝靠近第一端101a的方向转动,而带动每个第二连杆116和每个第一连杆114均朝靠近第一端101a的方向转动,以推动每个夹爪臂112运动,而使各个夹爪单元103的夹爪臂112相互靠近。此时,请参阅图5,夹爪装置100处于第二夹持范围b-b。
46.开启驱动器,以驱动传动件171向远离第二连杆116的方向运动,以拉动每个夹爪单元103的第二转动件124朝远离第二端101b的方向转动,以带动每个第一转动件122朝远离第一端101a的方向转动,而带动每个第二连杆116和每个第一连杆114均朝远离第一端101a的方向转动,以拉动每个夹爪臂112运动,而使各个夹爪单元103的夹爪臂112相互远离。此时,请再次参阅图2,夹爪装置100恢复至第一夹持范围a-a。
47.上述夹爪装置100至少具有如下优点:
48.上述夹爪装置100包括壳体101和多个夹爪单元103,每个夹爪单元103的连杆组件110包括夹爪臂112、第一连杆114和与第一连杆114间隔设置的第二连杆116,夹爪臂112与壳体101转动连接,第一连杆114和第二连杆116均转动连接夹爪臂112和壳体101,每个夹爪单元103的转动组件120包括与第二连杆116转动连接的第一转动件122和与第一转动件122转动连接的第二转动件124,第二转动件124能够转动,以带动夹爪臂112运动而带动第一连杆114转动,然后使各个夹爪单元103的夹爪臂112相互靠近或者相互远离,从而实现夹爪装置100的夹持功能,并且,将连杆组件110设置在壳体101的外部,且通过第一连杆114和第二连杆116而与壳体101转动连接,将转动组件120收容于壳体101的内部,且通过第一转动件122而与第二连杆116转动连接,使得能够在第一连杆114和第二连杆116均与壳体101相对转动的情况下实现夹爪装置100的夹持功能,有利于实现壳体101的密闭性,以保证壳体101内部的部件与外界环境的相对隔离,对壳体101内部的部件的防护效果较好。
49.现有的夹爪装置因其结构的局限性,使得需要通过引入柔性防护罩等方式来实现壳体101的密闭性。而上述夹爪装置100中,夹爪单元103与壳体101的连接处均未发生位置移动,使得容易通过密封件160等方式控制夹爪单元103和壳体101的连接处的密封性,以更容易实现壳体101的密闭性,无需引入柔性防护罩即可实现壳体101的密闭性,结构简单,成本低。
50.再者,上述夹爪装置100通过设置连杆组件110和转动组件120,使得夹爪装置100具有较大的夹持范围,以使夹爪装置100在满足夹持作用的情况下,还具有较好密闭性。
51.进一步地,由于本研究的夹爪装置100的壳体101具有较好地密闭性,能够更好地保护壳体101内部的部件,使得夹爪装置100的维护更方便,延长夹爪装置100的使用寿命。
52.可以理解,相邻两个第一连杆114的靠近壳体101的一端不限于间隔设置,在其他实施例中,相邻两个第一连杆114的靠近壳体101的一端也可以通过同一个连接轴与壳体101转动连接。
53.可以理解,第一连杆114和第二连杆116不限于沿第一端101a靠近第二端101b的方向间隔设置,第一连杆114和第二连杆116也可以沿第二端101b靠近第一端101a的方向间隔设置。换而言之,第二连杆116也可以设置在第一连杆114的靠近第一端101a的一侧。
54.可以理解,壳体101的形状不限于为长方体,也可以为其他形状,例如圆柱体形。可以理解,壳体101的形状不限于为条形,也可以为球形。可以理解,夹爪单元103的数量不限。夹爪单元103的数量不限于为两个,也可以为三个或者四个等,可以根据需要进行设置。
55.请参阅图6,第二实施方式的夹爪装置200的结构与第一实施方式的夹爪装置100的结构大致相同,不同之处在于,壳体201的形状大致为圆柱体形。夹爪单元203有三个。相邻两个夹爪单元203呈120
°
角设置。
56.请一并参阅图7和图8,具体地,壳体201具有凸起部201c。凸起部201c位于壳体201的第一端201a。凸起部201c具有三个分支臂201d。相邻两个分支臂201d呈120
°
相交设置,以使凸起部201c呈y字形。三个夹爪单元203的第一连杆214分别与三个分支臂201d铰接。三个夹爪单元203的第二连杆216分别与三个分支臂201d铰接。每个夹爪单元203的转轴230转动地穿设第二连杆216、壳体201和第一转动件222。传动件271呈圆形设置。以传动件271的延伸方向为轴,三个第二转动件224环绕传动件271设置。三个第二转动件224呈120
°
角设置。
57.上述夹爪装置200中,壳体201具有较好的密闭性,以保证壳体201内部的部件与外
界环境的相对隔离,对壳体201内部的部件的防护效果较好。进一步地,上述夹爪装置200具有三个夹爪单元203,相邻两个夹爪单元203呈120
°
角设置,使得夹爪装置200具有较大的夹持范围,并且使夹爪装置200在夹持工件时夹持地更加稳定。
58.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1