一种可翻滚越障的载物机器人的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种可翻滚越障的载物机器人。
背景技术:
2.机器人是自动执行工作的机器装置,主要由机械身体、记忆或程序功能和核心零件等组成。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类的工作,例如生产业、建筑业,或是危险的工作,机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物。包括家务型、操作型、程控型、数控型、搜救类、平台型和学习控制型等几大类。目前,机器人在军事、科研、教育、生活等方面已获得广泛的研究和应用。
3.现有的机器人在运输货物时,越障能力较差,导致在运输过程中可能发生磕碰导致货物遗落,并对机器人造成损坏的问题,因此我们提出了一种可翻滚越障的载物机器人用于解决上述问题。
技术实现要素:
4.本实用新型的目的是为了解决现有的机器人在运输货物时,越障能力较差,导致在运输过程中可能发生磕碰导致货物遗落,并对机器人造成损坏的缺点,而提出的一种可翻滚越障的载物机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种可翻滚越障的载物机器人,包括顶板,所述顶板的底部转动安装有四个螺纹杆的顶端,顶板的底部固定安装有第一电机,第一电机的输出轴上与螺纹杆的外侧分别固定安装有第一齿轮与第二齿轮,第一齿轮与第二齿轮相啮合,四个螺纹杆的外均固定安装有链轮,四个链轮上传动连接有同一个链条,四个螺纹杆的外侧均螺纹安装有支撑柱,四个支撑柱的底端固定安装有同一个底板,底板的底部两侧均固定安装有固定板,两个固定板相互靠近的一侧转动安装有两个第一转轴,两个第一转轴的外侧均固定安装有两个滚轮与第一皮带轮,两个第一皮带轮上传动连接有同一个第一皮带,两个固定板中位于后侧的固定板的一侧固定安装有第二电机,第二电机的输出轴与两个第一转轴中位于左侧的第一转轴固定连接,顶板的底部两侧均固定安装有连接板,两个连接板相互靠近的一侧转动安装有两个第二转轴,两个第二转轴的两端分别延伸至两个连接板外并固定安装有圆盘,四个圆盘的外侧均固定安装有三个支撑腿,两个连接板中位于前侧的连接板的后侧固定安装有第三电机,第三电机的输出轴与两个第二转轴中位于右侧的第二转轴的外侧分别固定安装有第三齿轮与第四齿轮,第三齿轮与第四齿轮相啮合,两个第二转轴的外侧均固定安装有第二皮带轮,两个第二皮带轮上传动连接有同一个第二皮带。
7.优选的,所述顶板的顶部开设有凹槽,凹槽的两侧内壁上均滑动安装有滑杆,两个滑杆相互远离的一端均延伸至顶板外并固定安装有挡板,两个滑杆相互靠近的一端均延伸至凹槽内并固定安装有夹板,两个滑杆的外侧均活动套设有弹簧,弹簧的两端分别与凹槽
和夹板固定连接,便于对货物的夹持固定。
8.优选的,所述凹槽的两侧内壁上均固定安装有滑套,两个滑杆分别滑动连接在相对应的滑套内,便于滑动连接滑杆。
9.优选的,所述支撑柱的内侧开设有螺纹孔,螺纹杆通过螺纹孔螺纹连接在支撑柱的内侧,便于将螺纹杆与支撑柱螺纹连接。
10.优选的,四个支撑柱的外侧固定安装有同一个支撑板,两个连接板相互靠近的一侧均开设有滑槽,支撑板滑动连接在两个滑槽内,便于该装置的升降移动。
11.优选的,所述固定板的内侧固定安装有轴承的外圈,第一转轴与轴承的内圈固定套接,便于转动安装第一转轴。
12.本实用新型中,所述的一种可翻滚越障的载物机器人,通过拉动两个滑杆相互远离移动,带动搞两个夹板相互远离移动,通过弹簧的弹性形变,使得弹簧收缩,然后将需要运送的货物放置在凹槽内,随后放开两个滑杆,通过弹簧的弹性形变,使得两个夹板复位,并且将货物夹住,随后可以通过启动第二电机带动第一转轴转动,然后即可通过两个第一皮带轮与第一皮带的传动连接,即可带动两个第一转轴转动,从而即可带动四个滚轮转动,从而即可带动该装置移动,从而便于对货物的输送;
13.本实用新型中,所述的一种可翻滚越障的载物机器人,通过启动第一电机,通过第一齿轮与第二齿轮的啮合传动,即可带动螺纹杆转动,然后通过四个链轮与链条的传动连接,即可带动四个螺纹杆同步转动,随后通过螺纹杆与支撑柱的螺纹连接,即可带动该装置向下移动,从而当位于下方的八个支撑腿与地面接触后,即可关闭第一电机,然后启动第三电机,通过第三齿轮与第四齿轮的啮合传动,并且通过两个第二皮带轮与第二皮带的啮合传动,即可带动两个第二转轴转动,然后即可通过第二转轴两端的圆盘与圆盘外侧的三个支撑腿,即可使得该装置越过障碍物;
14.本实用新型结构设计合理,便于对货物的输送,且在遇到障碍物时,可以轻松越过障碍物,提高了其越障能力。
附图说明
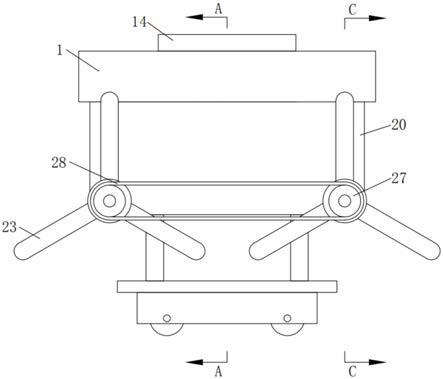
15.图1为本实用新型提出的一种可翻滚越障的载物机器人的结构示意图;
16.图2为本实用新型提出的一种可翻滚越障的载物机器人的a
‑
a截面的结构示意图;
17.图3为本实用新型提出的一种可翻滚越障的载物机器人的b部分的结构示意图;
18.图4为本实用新型提出的一种可翻滚越障的载物机器人的c
‑
c截面的结构示意图。
19.图中:1、顶板;2、凹槽;3、滑杆;4、夹板;5、弹簧;6、螺纹杆;7、第一电机;8、第一齿轮;9、第二齿轮;10、链轮;11、链条;12、支撑柱;13、底板;14、固定板;15、第一转轴;16、滚轮;17、第一皮带轮;18、第一皮带;19、第二电机;20、连接板;21、第二转轴;22、圆盘;23、支撑腿;24、第三电机;25、第三齿轮;26、第四齿轮;27、第二皮带轮;28、第二皮带。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
21.参照图1
‑
4,一种可翻滚越障的载物机器人,包括顶板1,顶板1的底部转动安装有四个螺纹杆6的顶端,顶板1的底部固定安装有第一电机7,第一电机7的输出轴上与螺纹杆6的外侧分别固定安装有第一齿轮8与第二齿轮9,第一齿轮8与第二齿轮9相啮合,四个螺纹杆6的外均固定安装有链轮10,四个链轮10上传动连接有同一个链条11,四个螺纹杆6的外侧均螺纹安装有支撑柱12,四个支撑柱12的底端固定安装有同一个底板13,底板13的底部两侧均固定安装有固定板14,两个固定板14相互靠近的一侧转动安装有两个第一转轴15,两个第一转轴15的外侧均固定安装有两个滚轮16与第一皮带轮17,两个第一皮带轮17上传动连接有同一个第一皮带18,两个固定板14中位于后侧的固定板14的一侧固定安装有第二电机19,第二电机19的输出轴与两个第一转轴15中位于左侧的第一转轴15固定连接,顶板1的底部两侧均固定安装有连接板20,两个连接板20相互靠近的一侧转动安装有两个第二转轴21,两个第二转轴21的两端分别延伸至两个连接板20外并固定安装有圆盘22,四个圆盘22的外侧均固定安装有三个支撑腿23,两个连接板20中位于前侧的连接板20的后侧固定安装有第三电机24,第三电机24的输出轴与两个第二转轴21中位于右侧的第二转轴21的外侧分别固定安装有第三齿轮25与第四齿轮26,第三齿轮25与第四齿轮26相啮合,两个第二转轴21的外侧均固定安装有第二皮带轮27,两个第二皮带轮27上传动连接有同一个第二皮带28。
22.顶板1的顶部开设有凹槽2,凹槽2的两侧内壁上均滑动安装有滑杆3,两个滑杆3相互远离的一端均延伸至顶板1外并固定安装有挡板,两个滑杆3相互靠近的一端均延伸至凹槽2内并固定安装有夹板4,两个滑杆3的外侧均活动套设有弹簧5,弹簧5的两端分别与凹槽2和夹板4固定连接,便于对货物的夹持固定,凹槽2的两侧内壁上均固定安装有滑套,两个滑杆3分别滑动连接在相对应的滑套内,便于滑动连接滑杆3,支撑柱12的内侧开设有螺纹孔,螺纹杆6通过螺纹孔螺纹连接在支撑柱12的内侧,便于将螺纹杆6与支撑柱12螺纹连接,四个支撑柱12的外侧固定安装有同一个支撑板,两个连接板20相互靠近的一侧均开设有滑槽,支撑板滑动连接在两个滑槽内,便于该装置的升降移动,固定板14的内侧固定安装有轴承的外圈,第一转轴15与轴承的内圈固定套接,便于转动安装第一转轴15。
23.本实用新型中,在使用时,可以通过拉动两个滑杆3相互远离移动,带动搞两个夹板4相互远离移动,通过弹簧5的弹性形变,使得弹簧5收缩,然后将需要运送的货物放置在凹槽2内,随后放开两个滑杆3,通过弹簧5的弹性形变,使得两个夹板4复位,并且将货物夹住,随后可以通过启动第二电机19带动第一转轴15转动,然后即可通过两个第一皮带轮17与第一皮带18的传动连接,即可带动两个第一转轴15转动,从而即可带动四个滚轮16转动,从而即可带动该装置移动,从而便于对货物的输送,当遇到障碍物时,即可关闭第二电机19,然后启动第一电机7,通过第一齿轮8与第二齿轮9的啮合传动,即可带动螺纹杆6转动,然后通过四个链轮10与链条11的传动连接,即可带动四个螺纹杆6同步转动,随后通过螺纹杆6与支撑柱12的螺纹连接,即可带动该装置向下移动,从而当位于下方的八个支撑腿23与地面接触后,即可关闭第一电机7,然后启动第三电机24,通过第三齿轮25与第四齿轮26的啮合传动,并且通过两个第二皮带轮27与第二皮带28的啮合传动,即可带动两个第二转轴21转动,然后即可通过第二转轴21两端的圆盘22与圆盘22外侧的三个支撑腿23,即可使得该装置越过障碍物。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1