辅助头顶作业的穿戴式外肢体机器人的制作方法
1.本发明涉及外肢体机器人技术领域,具体是辅助头顶作业的穿戴式外肢体机器人。
背景技术:
2.近年来,随着机器人技术的不断发展,我们对于机器人的认知也越来越多,根据各种各样的应用场景也设计出了不同种类的机器人。我们可以根据周围环境来选择不同的机器人来最大化的配合我们,达到更好的效果。外肢体机器人可以通过增加人类的肢体数量使我们在需要多人共同协作但又不允许多人同时存在的情况下独立地应对复杂的生产任务,增强人执行任务的能力,提高人的生产效率。外肢体机器人使得机器人与人的互动更加密切,那两条机械臂就仿佛人自己的手臂一般,可以通过自己的某些行为特征来控制机械臂配合自己运动,实现更好的人机交互。
3.外肢体机器人是指可以穿戴在身上并且可以协助人体完成某些特定任务的机器人,它兼顾了可穿戴机器人和协作机器人的一些特点,可以穿在人体身上但又独立于人体,与人体来共同完成某一任务的机器人。外肢体机器人兼具机器人的耐疲劳性和人体的灵活、精准性,能够极大程度发挥人机协作的优势。例如,在飞机装配安装天花板的这种头顶作业过程中,虽然某些任务是可以两个人来一起完成,但是这样会存在时间和资金的成本高并且效率低等问题。而且,舱内安装天花板的空间较小,在类似这种狭窄密闭的环境下,只能允许一个人进入,而所要完成的任务却是一个人完成不了的。因此,具有辅助安装天花板功能的外肢体机器人就可以派上用场。
4.经对现有技术文献的检所发现:
5.中国专利(申请号2015101308616):腰部可穿戴功能辅助机械臂。该专利主要提供了一种位于腰部两侧的七自由度绳驱机械双臂,在一定程度上克服了传统关节电机驱动型机械臂负载自重比低的问题,但是其整体结构质量过重,对人体负荷较大,穿戴舒适性未能获得明显改善,而且安装在腰间并不能够起到辅助安装天花板的功能。
6.中国专利(申请号2019106119360):一种人体运动辅助两用式外肢体机器人。该专利主要提供了一种既可以充当“第三条腿”辅助行走,又可以作为“手臂”完成抓取动作的装置,结构紧凑,且功能集成,可以提供很多帮助。不足的是,该装置没有明确的控制方式,没有人体物理信号来用于人机协同。
技术实现要素:
7.针对以上缺点,本发明提供了辅助头顶作业的穿戴式外肢体机器人,采用了轻便的绳驱机械臂结构,并在选型和设计等方面充分考虑,降低了整体的质量,有效降低人体负荷,避免疲劳损伤。
8.为实现上述目标功能,本发明采用如下技术方案:
9.一种辅助头顶作业的穿戴式外肢体机器人,包括:肩部穿戴辅具、安装在肩部穿戴
辅具上的绳驱机械臂、电机组模块、控制模块、电源模块和传感检测模块;
10.所述的绳驱机械臂包括:机械臂本体和末端执行装置;
11.所述电机组模块包括:伺服电机、伺服电机驱动器和联轴器,通过套索与绳驱机械臂连接;
12.所述传感检测模块包括:肩部惯导、编码器、压力传感器、电子皮肤、穿戴式惯导信号采集模块和肌电信号采集手环;
13.控制模块通过与传感检测模块和电机组模块相连,控制机械臂的运动。
14.进一步的,末端执行装置为平板机构或机械手;所述肩部穿戴辅具包括:电机组基座、电源基座、控制模块基座、绳驱机械臂固定基座、套索线管座与肩部穿戴辅具的背带;其中绳驱机械臂固定基座与绳驱机械臂连接;控制模块安装在控制模块基座中,通过预留接口与电机组模块、传感检测模块连接,实现对绳驱机械臂的驱动和控制。
15.进一步的,所述绳驱机械臂包括基座、与基座铰接的大臂、与大臂铰接的小臂;基座与绳驱机械臂固定基座通过第一旋转关节连接,第一旋转关节由伺服电机驱动器直接驱动;基座与大臂之间通过第二旋转关节连接;大臂与小臂之间通过第三旋转关节连接;第二旋转关节与第三旋转关节均通过套索牵引钢丝绳驱动。
16.进一步的,传感检测模块通过不同传感器的配置对机械臂关节转动的角度、关节处的角速度和角加速度以及末端接触力进行测量与感知;传感检测模块配合控制系统模块检测和感知人体的姿态以及肢体运动,实现最终的人机交互。
17.进一步的,所述的压力传感器安装于末端执行装置上,在作业过程中,当末端机构接触到物体时,压力传感器检测到所受力的大小;绳驱机械臂通过压力传感器上所采集到的信息来进行相对应的调整;如果压力传感器检测到的力小于预设的阈值,则继续转动机械臂来加大末端给物体所施加的力;如果压力传感器检测到的力大于预设的阈值,则反向转动电机来减小末端给物体所施加的力;如果压力传感器检测到的力位于预设的阈值之内,则保持当前状态。
18.进一步的,所述的肩部惯导安装在机械臂人体肩部处;肩部惯导用于采集人体轻微移动的信息来实现机械臂相对应的调整以便保持末端位姿。
19.进一步的,使用电子皮肤进行安全监测;电子皮肤附着于机械臂大臂和小臂的臂身处,当机械臂速度较大时,接近传感器安全阈值便会增大;当机械臂速度较小时,接近传感器安全阈值便会减小;当检测到安全阈值范围内有物体或者障碍存在时,即有物体存在于许用安全距离以内时,机械臂紧急停止运动或者在传感器引导下重新自主规划路线,进行避障操作。
20.进一步的,头戴式惯导信号采集模块安装于使用者的头部处,用以检测使用者的头部运动姿态,通过算法消除头部微小幅度自然运动,采集头部的大幅度左右摇动和俯仰摇动,估计穿戴者的运动意图以及外肢体理想运动方位,达到操作者通过头部运动间接对机械臂本体和末端执行装置进行持续运动控制的功能。
21.进一步的,肌电信号采集手环佩戴于使用者双手手腕处用以采集使用者的手部肌电信号;当肌电手环采集到手部肌电信号后,通过计算机数据处理使用者的手部信息,完成动作识别;通过控制模块将识别到的动作所对应的机器人运动命令发送至驱动模块,实现对机械臂本体和末端执行装置的运动控制,完成人机交互。
22.与现有技术相比,发明具有如下有益效果:
23.1.本发明中的辅助头顶作业的穿戴式外肢体机器人,适用于头顶作业,例如在飞机装配中安装天花板的情景,应用环境更具有针对性,有着较高的适用性。
24.2.本发明中肩部采用惯导来采集人体数据,可以对因人体晃动而导致机械臂的移动进行动态的补偿。
25.3.本发明中采取了接近传感器,当距离人体的距离小于安全阈值时便会停止运动或者进行避障运动,提高了外肢体机器人的安全性。
26.4.本发明中采用了头部惯导模块,操作直观且控制方式也很符合人体运动的特征,肌电控制也很简单且可靠。
27.5.本发明中从结构设计和电机选型等方面降低了整体的质量,并实现了驱动后置,减轻了人的穿戴负担,提高了工作效率。
附图说明
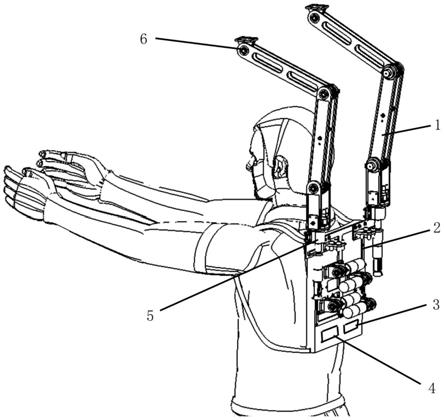
28.图1为本发明穿戴式外肢体机器人穿戴在人体上的结构示意图。
29.图2为本发明穿戴式外肢体机器人穿戴在人体上另一个角度的结构示意图。
30.图3为本发明中的三自由度机械臂结构示意图。
31.图4为本发明中的肩部穿戴辅具结构示意图。
32.图5为本发明中的电机组模块结构示意图。
33.其中:安装在肩部穿戴辅具上的三自由度绳驱机械臂1、肩部穿戴辅具2、电源模块3、控制模块4、电机组模块5、传感检测模块6、机械臂本体101、末端执行装置102、电机组基座201、电源基座202、控制模块基座203、绳驱机械臂的固定基座204、套索线管座205、伺服电机501、伺服电机驱动器502、联轴器503、惯导601、编码器602、压力传感器603、电子皮肤604、穿戴式惯导信号采集模块605和肌电信号采集手环606。
具体实施方式
34.下面对本发明的实施例作详细说明:
35.请结合图1所示,辅助头顶作业的穿戴式外肢体机器人,包括:安装在肩部穿戴辅具上的两个绳驱机械臂1、肩部穿戴辅具2、电源模块3、控制模块4、电机组模块5和传感检测模块6。
36.如图3所示,所述安装在肩部穿戴辅具上的三自由度绳驱机械臂1包括:机械臂本体101和末端执行装置102。机械臂本体包括基座、与基座铰接的大臂、与大臂铰接的小臂;基座与绳驱机械臂固定基座通过第一旋转关节304连接,第一旋转关节304由伺服电机驱动器直接驱动;基座与大臂之间通过第二旋转关节305连接;大臂与小臂之间通过第三旋转关节306连接;第二旋转关节305与第三旋转关节306均通过套索牵引钢丝绳驱动。末端执行装置102为平板机构或机械手,可根据不同的应用场景进行相应的替换。
37.如图4所示,所述肩部穿戴辅具2包括:电机组基座201、电源基座202、控制模块基座203、绳驱机械臂的固定基座204、套索线管座205与肩部穿戴辅具的背带。其中绳驱机械臂的固定基座204与绳驱机械臂连接,使二者可以实现物理连接。其中控制模块4安装在控制模块基座中,通过预留接口与电机组模块5、传感检测模块6连接,实现对机械双臂的驱动
和控制。
38.所述的传感检测模块6包括:肩部惯导601、编码器602、压力传感器603、电子皮肤604、穿戴式惯导信号采集模块605和肌电信号采集手环606。传感检测模块6通过不同传感器的配置可对机械臂关节转动的角度、关节处的角速度和角加速度以及末端接触力进行测量与感知。同时,传感检测模块6还可以配合控制系统模块检测和感知人体的姿态以及肢体运动,实现最终的人机交互。
39.所述的压力传感器603安装于平板机构的末端,在安装天花板的过程中,当末端机构接触到天花板时,压力传感器603会检测到所受力的大小。绳驱机械臂通过压力传感器603所采集到的信息来进行相对应的调整;如果压力传感器603检测到的力小于预设的阈值,则继续转动机械臂来加大末端给物体所施加的力;如果压力传感器603检测到的力大于预设的阈值,则反向转动电机来减小末端给物体所施加的力;如果压力传感器603检测到的力位于预设的阈值之内,则保持当前状态。
40.所述的惯导601安装在机械臂靠近人体肩部处。在工作中,人体的状态可能会有着轻微的改变,惯导通过采集转动的角度和偏移的量来衡量人体状态的变化,然后根据相应各坐标系之间的关系反映到末端执行机构上,使得末端执行机构做出相对应的补偿,起到了外肢体机器人跟随人体轻微调整的功能以便保持末端位姿。
41.所述的电子皮肤604。电子皮肤604是接近传感器的阵列,将其附着于机械臂大臂和小臂的臂身处,与人体及周围环境进行距离和速度感知。它紧贴在臂身处,几乎无重量,可以根据检测到的速度来动态的调整安全阈值的大小。当机械臂速度较大时,接近传感器安全阈值便会增大;当机械臂速度较小时,接近传感器安全阈值便会减小。当检测到安全阈值范围内有物体或者障碍存在时,就会停止机械臂的运动或者进行避障操作,以保证人机交互的安全性。
42.所述的穿戴式惯导信号采集模块605。穿戴式惯导信号采集模块605安装于使用者的头部处,能够检测使用者的头部运动姿态。通过算法消除头部微小幅度自然运动,采集头部的大幅度左右摇动和俯仰摇动,帮助操作者对机械臂本体101和末端执行装置102进行连续运动控制。
43.所述的肌电信号采集手环606。肌电信号采集手环606由使用者佩戴于双手手腕处,负责采集使用者的手部肌电信号。当肌电手环采集到手部肌电信号后,通过计算机数据处理使用者的手部信息,完成动作识别。通过控制模块4将识别到的动作所对应的机器人运动命令发送至驱动模块,实现对机械臂本体101和末端执行装置102的运动控制,完成人机交互。
44.本发明具体实现的方法和途径很多,以上所述仅是本发明的优选实施方式。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改性,这些都是属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1