一种快换定位夹持方法及其工装与流程
1.本发明涉及工装技术领域,更具体的说是一种快换定位夹持方法及其工装。
背景技术:
2.工件在进行部件的拆卸或者安装时,都需要先对工件进行定位,便于进行螺栓的拆卸或部件的拆装,但是对工件进行前后左右四个方向上的定位时,就会因为四个同一平面上的定位件阻挡工件的移动,从而使工件无法通过传送带等运输机构自动进行放置或者取下,往往需要工作人员手动进行工件的更换,费时费力的同时还需要工作人员和装置近距离接触有安全隐患。
技术实现要素:
3.本发明的目的是提供一种快换定位夹持方法及其工装,能够连续自动的进行工件的定位和更换。
4.本发明的目的通过以下技术方案来实现:
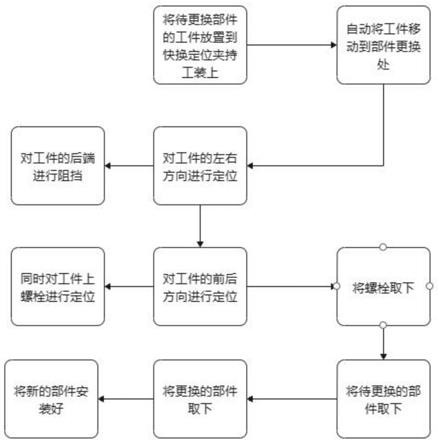
5.一种快换定位夹持方法,该方法包括以下步骤
6.步骤一:将工件放置到快换定位夹持工装上,将工件自动运输到带定位位置;
7.步骤二:对工件的前后左右进行定位,进而对工件上的螺栓位置进行定位;
8.步骤三:将待更换部件上的螺栓取下后将待更换部件取下;
9.步骤四:将待更换部件收集,同时将新的部件安装回原处。
10.一种快换定位夹持工装,包括支撑板、传送带、阻挡板、固定杆、滑轨、驱动杆、移动架、移动块、转动板、伸缩板和夹紧部,传送带转动连接在支撑板上,两个固定杆均固定连接在阻挡板上,两个滑轨均固定连接在支撑板上,两个滑轨均为弧线轨道和直线轨道组合,阻挡板滑动连接在两个滑轨之间,两个驱动杆均滑动连接在支撑板上,阻挡板纵向滑动连接在两个驱动杆之间,两个固定杆分别纵向滑动连接在两个驱动杆上,移动架纵向滑动连接在支撑板上,移动架和支撑板之间设有多个弹簧,移动块滑动连接在移动架上,转动板铰接在移动块上,转动板只能向后转动,伸缩板通过伸缩杆安装在转动板上使得伸缩板能够纵向移动,伸缩板和转动板之间设有弹簧ⅰ。
11.螺纹杆、夹紧框、螺纹环、连接杆ⅰ、带轮轴和夹紧辊,两个夹紧框分别固定连接在两个螺纹杆上,两个螺纹杆均滑动连接在支撑板上,两个螺纹杆的移动方向相反向距离相同,两个螺纹环均转动连接在支撑板上,两个螺纹环分别和两个螺纹杆之间螺纹传动,两个螺纹环均和带轮轴之间皮带传动,带轮轴转动连接在支撑板的下端,两个连接杆ⅰ分别转动连接在两个夹紧框上,两个连接杆ⅰ分别转动连接在两个驱动杆上,两个夹紧框上均匀转动连接有多个夹紧辊。
12.一种快换定位夹持工装包括连接杆ⅱ和升降杆,连接杆ⅱ的下端转动连接在移动架上,连接杆ⅱ的上端转动连接在升降杆上,升降杆纵向滑动连接在支撑板上,升降杆纵向滑动连接在移动架上。
13.一种快换定位夹持工装包括调节架、滑块、转动筒、旋转杆、盖帽、吸盘、辅助板、运输板和运输框,两个调节架均通过螺栓可拆卸安装在移动架上,移动架上设有多个螺纹孔,两个滑块分别滑动连接在两个调节架上,两个转动筒分别转动连接在两个滑块的下端,两个旋转杆分别滑动连接在两个转动筒内,两个旋转杆和两个转动筒之间均设有弹簧ⅲ,两个盖帽分别固定连接在两个旋转杆的下端,两个盖帽均为正六边形,吸盘固定连接在吸盘的下端,辅助板固定连接在移动架上,辅助板上设置有向下倾斜的斜板,运输板滑动连接在支撑板上,运输框滑动连接在运输板上,运输框和运输板之间设有弹簧ⅳ,运输框滑动连接在支撑板上,运输框上设置有分隔杆,盖帽上设有磁铁。
附图说明
14.下面结合附图和具体实施方法对本发明做进一步详细的说明。
15.图1是本发明的一种快换定位夹持方法的流程图;
16.图2是本发明支撑板概要图;
17.图3是本发明阻挡板概要图;
18.图4是本发明夹紧框概要图;
19.图5是本发明夹紧辊概要图;
20.图6是本发明螺纹环概要图;
21.图7是本发明升降杆概要图;
22.图8是本发明伸缩板概要图;
23.图9是本发明调节架概要图;
24.图10是本发明转动筒概要图;
25.图11是本发明运输板概要图;
26.图12是本发明总体概要图.
27.图中;
28.支撑板1;传送带101;阻挡板11;固定杆12;滑轨13;驱动杆14;
29.移动架21;移动块22;转动板23;伸缩板24;连接杆ⅱ25;升降杆26;
30.螺纹杆31;夹紧框32;螺纹环33;连接杆ⅰ34;带轮轴35;夹紧辊36;
31.调节架41;滑块42;转动筒43;旋转杆44;盖帽45;吸盘46;辅助板47;运输板48;运输框49。
具体实施方式
32.下面结合附图对本发明作进一步详细说明。
33.如图1所示;
34.一种快换定位夹持方法,该方法包括以下步骤
35.步骤一:将工件放置到快换定位夹持工装上,将工件自动运输到带定位位置;
36.步骤二:对工件的前后左右进行定位,进而对工件上的螺栓位置进行定位;
37.步骤三:将待更换部件上的螺栓取下后将待更换部件取下;
38.步骤四:将待更换部件收集,同时将新的部件安装回原处。
39.如图2-4所示;
40.所述一种快换定位夹持工装包括支撑板1、传送带101、阻挡板11、固定杆12、滑轨13、驱动杆14、移动架21、移动块22、转动板23、伸缩板24和夹紧部,传送带101转动连接在支撑板1上,两个固定杆12均固定连接在阻挡板11上,两个滑轨13均固定连接在支撑板1上,两个滑轨13均为弧线轨道和直线轨道组合,阻挡板11滑动连接在两个滑轨13之间,两个驱动杆14均滑动连接在支撑板1上,阻挡板11纵向滑动连接在两个驱动杆14之间,两个固定杆12分别纵向滑动连接在两个驱动杆14上,移动架21纵向滑动连接在支撑板1上,移动架21和支撑板1之间设有多个弹簧,移动块22滑动连接在移动架21上,转动板23铰接在移动块22上,转动板23只能向后转动,伸缩板24通过伸缩杆安装在转动板23上使得伸缩板24能够纵向移动,伸缩板24和转动板23之间设有弹簧ⅰ;
41.本装置能够自动连续的对工件进行定位,通过将工件放置在传送带101上,传送带101对工件进行运输,使得工件移动到阻挡板11和伸缩板24之间,工件和先和伸缩板24接触,带动伸缩板24和转动板23转动,不影响工件的移动,在工件通过后,伸缩板24和转动板23反转复位,通过夹紧部对工件进行夹紧,同时使得工件进行左右方向上的移动,对工件进行初步的定位,同时通过夹紧部驱动两个驱动杆14向中间移动,两个驱动杆14向中间移动带动阻挡板11向中间移动,阻挡板11向中间移动同时向下移动,使得阻挡板11移动到工件的后端,同时阻挡板11和两个驱动杆14移动也会带动两个固定杆12移动,而两个固定杆12只能纵向移动,使得阻挡板11只能纵向移动,进而避免阻挡板11在移动过程中发生转动,随后通过移动块22移动带动转动板23移动,转动板23移动带动伸缩板24移动,伸缩板24移动后和工件接触从而推动工件移动,最后使得工件和阻挡板11接触,完成对工件的定位,在完成对工件的操作之后,阻挡板11反向移动同时向上移动进行复位,这时通过传送带101带动工件移动,使得工件能够从阻挡板11的下方通过,无需手动进行工件的放置和拾取,减少工作人员和装置的接触,减少工作人员受伤的可能,同时节省人力物力,提高工作效率。
42.如图4-6所示;
43.夹紧部包括螺纹杆31、夹紧框32、螺纹环33、连接杆ⅰ34、带轮轴35和夹紧辊36,两个夹紧框32分别固定连接在两个螺纹杆31上,两个螺纹杆31均滑动连接在支撑板1上,两个螺纹杆31的移动方向相反向距离相同,两个螺纹环33均转动连接在支撑板1上,两个螺纹环33分别和两个螺纹杆31之间螺纹传动,两个螺纹环33均和带轮轴35之间皮带传动,带轮轴35转动连接在支撑板1的下端,两个连接杆ⅰ34分别转动连接在两个夹紧框32上,两个连接杆ⅰ34分别转动连接在两个驱动杆14上,两个夹紧框32上均匀转动连接有多个夹紧辊36;
44.带轮轴35通过减速电机ⅰ驱动使得带轮轴35能够转动;
45.通过夹紧部对工件进行左右方向的定位,通过带轮轴35转动带动两个螺纹环33转动,两个螺纹环33转动带动两个螺纹杆31向中间移动,两个螺纹杆31向中间移动带动两个夹紧框32向中间移动,两个夹紧框32向中间移动后和工件接触,从而带动工件进行左右方向上的移动,对工件的左右方向进行定位,便于后续对工件进行前后方向上的定位,同时通过两个夹紧框32向中间移动带动两个连接杆ⅰ34转动,两个连接杆ⅰ34转动带动两个驱动杆14移动,使得两个夹紧框32能够驱动阻挡板11移动;
46.进一步的,在完成对工件的左右方向上的定位后,还需要对工件进行前后方向上的定位,所以工件还需要进行前后移动,通过两个夹紧框32上的多个夹紧辊36和工件接触,进而减少两个夹紧框32和工件之间的摩擦力,使得工件在两个夹紧框32之间的移动更加流
畅,减少摩擦力还能减少对工件造成的磨损同时减少噪音的产生,进一步还能提升装置的使用寿命。
47.如图7-8所示;
48.一种快换定位夹持工装还包括连接杆ⅱ25和升降杆26,连接杆ⅱ25的下端转动连接在移动架21上,连接杆ⅱ25的上端转动连接在升降杆26上,升降杆26纵向滑动连接在支撑板1上,升降杆26纵向滑动连接在移动架21上;
49.升降杆26通过驱动组件驱动使得升降杆26能够纵向移动,该驱动组件有两个丝杠和减速电机组成,两个丝杠均转动连接在支撑板1上,两个丝杠之间皮带传动,减速电机固定连接在支撑板1上,其中一个丝杠固定连接在减速电机的输出轴上,两个丝杠均和升降杆26螺纹传动;
50.升降杆26向下移动,移动架21受到多个弹簧ⅱ的作用力无法向下移动,这时,升降杆26向下移动先带动移动块22移动,从而驱动伸缩板24移动对工件进行定位,在伸缩板24带动工件移动和阻挡板11接触,完成工件的定位之后,升降杆26向下移动就会带动移动架21向下移动,便于移动架21上的装置对工件进行操作,同时移动架21向下移动也会使转动板23向下移动,而伸缩板24无法向下移动,转动板23向下移动就会压缩两个伸缩杆同时压缩两个弹簧ⅰ。
51.如图9-12所示;
52.一种快换定位夹持工装还包括调节架41、滑块42、转动筒43、旋转杆44、盖帽45、吸盘46、辅助板47、运输板48和运输框49,两个调节架41均通过螺栓可拆卸安装在移动架21上,移动架21上设有多个螺纹孔,两个滑块42分别滑动连接在两个调节架41上,两个转动筒43分别转动连接在两个滑块42的下端,两个旋转杆44分别滑动连接在两个转动筒43内,两个旋转杆44和两个转动筒43之间均设有弹簧ⅲ,两个盖帽45分别固定连接在两个旋转杆44的下端,两个盖帽45均为正六边形,吸盘46固定连接在吸盘46的下端,辅助板47固定连接在移动架21上,辅助板47上设置有向下倾斜的斜板,运输板48滑动连接在支撑板1上,运输框49滑动连接在运输板48上,运输框49和运输板48之间设有弹簧ⅳ,运输框49滑动连接在支撑板1上,运输框49上设置有分隔杆,盖帽45上设有磁铁;
53.两个转动筒43分别通过两个减速电机ⅲ驱动使得两个转动筒43能够转动,两个减速电机ⅲ分别固定连接在两个滑块42上,两个转动筒43分别固定连接在两个减速电机ⅲ的输出轴上;
54.运输框49通过驱动组件ⅱ驱动使得运输框49能够横向移动驱动组件ⅱ,该驱动组件有两个丝杠ⅱ和减速电机ⅳ组成,两个丝杠ⅱ均转动连接在支撑板1上,两个丝杠ⅱ之间皮带传动,减速电机ⅳ固定连接在支撑板1上,其中一个丝杠ⅱ固定连接在减速电机ⅳ的输出轴上,两个丝杠均和运输框49螺纹传动;
55.本装置在完成对工件的定位后还能快速将工件上螺栓取下,便于后续对工件上端的部件进行更换,免去人力进行螺栓的拆卸和安装,提高作效率,减少工作人员的工作量,提前根据工件上螺栓的位置调节多个调节架41的位置和多个滑块42的位置,进而改变多个盖帽45的位置,使得在工件定位后,多个盖帽45能够直接对准多个螺栓,通过移动架21向下移动带动多个调节架41向下移动,调节架41向下移动带动滑块42向下移动,滑块42向下移动带动转动筒43向下移动,转动筒43向下移动带动旋转杆44向下移动,旋转杆44向下移动
带动盖帽45向下移动,盖帽45向下移动和螺栓接触,转动筒43转动带动旋转杆44转动,旋转杆44转动带动盖帽45转动,盖帽45在转动过程中套在螺栓上,使得盖帽45转动带动螺栓转动,进而将螺栓取出,螺栓取出过程中向上移动,盖帽45也能在转动过程中带动旋转杆44向上移动压缩弹簧ⅲ;
56.进一步的,在完成螺栓的取下后,吸盘46工作便能吸住工件上端的部件,从而对工件上端的部件进行更换;
57.进一步的,吸盘46带动部件向上移动使得部件脱离工件,将待更换的部件放置在运输框49上阻挡杆的左端,通过运输框49移动带动运输板48移动,运输板48移动一段距离后和辅助板47接触,这时吸盘46失去吸力使得部件落在运输板48上,运输框49继续移动因运输板48被固定,使得运输框49相对运输板48移动,这时运输框49上的阻挡杆就会推动换下的部件移动,使得换下的部件沿着辅助板47和辅助板47上的斜板脱落便于进行集中收集,而运输框49内的部件也会随着运输框49移动到吸盘46下端,从而完成新部件的更换,便捷快速无需进行重复的定位和螺栓的看管。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1