基于自适应动态规划的移动机器人视觉伺服跟踪控制方法
1.本发明涉及智能控制以及移动机器人控制领域,具体涉及基于自适应动态规划的移动机器人视觉伺服跟踪控制方法。
背景技术:
2.随着移动机器人控制技术的发展,移动机器人如今已被广泛应用于工业生产、国防军事以及生活服务等众多方面。视觉传感器近年来逐渐变得价格经济易于获取,加上其本身具有获取环境信息丰富、外部感知能力强和适用范围广等特点,因而其被广泛装备移动机器人以及其他智能体系统。由于视觉传感器的作用,移动机器人的灵活性和智能性得到极大提高,可以适应更加复杂环境,基于视觉的机器人的定位、环境感知与控制技术也得到了很大的发展。因此基于视觉的移动机器人轨迹跟踪吸引了大量学者的关注与研究。
3.经典的视觉伺服控制主要分为基于图像、基于位置、与混合视觉伺服控制。基于图像的视觉伺服控制是通过在二维图像平面定义误差信号进行控制,不需要利用移动机器人三维位姿信息,且其对系统扰动具有鲁棒性但是很难控制移动机器人的偏转位姿。基于位置的视觉伺服控制需要在三维欧式空间定义误差信号,虽然需要进行三维重构,但这样直接对三维空间的误差进行控制可以保证其收敛性。考虑到移动机器人的视觉伺服轨迹跟踪控制问题的系统模型是一个时变仿射非线性系统。自适应动态规划是解决仿射非线性系统跟踪控制问题一种有效的方法。求解基于自适应动态规划的移动机器人视觉伺服轨迹跟踪的最优控制并不容易,因为其需要求得密顿-雅可比-贝尔曼方程的解。对于时不变非线性系统来说,其密顿-雅可比-贝尔曼方程是一个时不变的偏微分方程并且无法求得其解析解,目前大部分求解方法都是设计合适的神经网络结构来近似未知项。与上述一般非线性系统不同的是,由于移动机器人系统模型固有的时变特性,最优控制问题中的hjb方程含有两项偏微分项并值函数是关于状态与时间的函数且,这使得问题更加复杂。对时变非线性系统的最优控制仍然与时不变系统存在不同之处,同时带来许多挑战。
技术实现要素:
4.本发明提供了基于自适应动态规划的移动机器人视觉伺服跟踪控制方法,用于解决现有的移动机器人控制效果差,且控制成本高的技术问题。
5.为解决上述技术问题,本发明提出的技术方案为:
6.一种基于自适应动态规划的移动机器人视觉伺服跟踪控制方法,包括以下步骤:
7.通过移动机器人上的摄像机拍摄共面特征点的当前图像、期望图像以及参考图像;基于当前图像、期望图像以及参考图像,并利用单应性技术计算移动机器人当前的位姿信息与期望的位姿信息;基于计算得到的移动机器人当前的位姿信息与期望的位姿信息,并结合机器人运动学获得跟踪误差模型;
8.将跟踪误差模型的最优控制问题转化为求解哈密顿-雅可比-贝尔曼方程;利用移动机器人的实际状态信息,使用自适应在线学习算法求解哈密顿-雅可比-贝尔曼方程,得
到最优值函数,以最优值函数对应的最优控制输入控制移动机器人。
9.优选的,通过移动机器人上的摄像机拍摄共面特征点的当前图像、期望图像以及参考图像;基于当前图像、期望图像以及参考图像,并利用单应性技术计算移动机器人当前的位姿信息与期望的位姿信息;包括以下步骤:
10.设置移动机器人与装载于移动机器人上的摄像机的坐标系相重合,选择坐标系空间中四个共面特征点作为目标点,由摄像机目标点的当前图像、期望图像以及参考图像;基于摄像机模型将当前图像、期望图像以及参考图像的像素坐标进行欧式重构,并对欧式重构后的当前图像、期望图像以及参考图像的像素坐标进行归一化;
11.利用归一化后的当前图像、期望图像以及参考图像的像素坐标计算出移动机器人当前位置、期望位置分别相对参考位置的单应性矩阵,基于单应性技术得到移动机器人当前位姿与期望位姿。
12.优选的,归一化公式如下:
13.mi=k-1
pi14.其中,k为摄像机标定矩阵,pi为齐次像素坐标。
15.优选的,基于计算得到的移动机器人当前的位姿信息与期望的位姿信息,并结合机器人运动学获得跟踪误差模型,包括以下步骤:
16.计算移动机器人在当前摄像机坐标系中的位姿误差e(t),基于移动机器人运动学模型得到跟踪误差模型其中,f(e(t),t)为跟踪误差模型中关于状态e(t)是非线性的部分,g(e(t))为控制矩阵,u(e(t),t)为控制输入。
17.优选的,哈密顿-雅可比-贝尔曼方程为:
[0018][0019]
其中,表示对关于时间t求偏导,v
*
(e,t)为待求得最优值函数,f(e,t)为跟踪误差模型中关于状态e(t)是非线性的部分;q(e)为正定函数,g(e)为控制矩阵;表示对关于e(t)求偏导,r为对称正定矩阵。
[0020]
优选的,使用自适应在线学习算法求解哈密顿-雅可比-贝尔曼方程,得到最优值函数,包括以下步骤:
[0021]
基于当前实际系统的状态信息求解如下方程,计算v(e,t):
[0022][0023]
其中,δt为采样时间间隔,l(e(τ),u(e(τ)))表示效用函数;
[0024]
2)使用如下方法计算控制输入信号u(e,t):
[0025][0026]
3)在线不断学习,重复执行前两步使得自适应在线学习算法收敛。
[0027]
优选的,自适应在线学习算法为自适应神经网络算法,在每次迭代过程中,采用如下公式更新自适应神经网络算法的网络参数:
[0028]
[0029]
其中,w(t)为神经网络权值,φ(e(t))为神经网络的激活函数,l(e(t),u(e(t)))表示效用函数,α>0为神经网络权值的学习速率;
[0030]
采用如下公式计算控制输入信号u(e(t),t):
[0031][0032]
其中,r为对称正定矩阵,g(e(t))为控制矩阵。
[0033]
本发明具有以下有益效果:
[0034]
1、本发明中的基于自适应动态规划的移动机器人视觉伺服跟踪控制方法,不仅能够实现移动机器人利用视觉信息完成轨迹跟踪任务和保证系统稳定性,还能实现期望的最优性能指标,降低控制成本的同时还能提高移动机器人跟踪效果,改善控制器性能。
[0035]
2、与现有控制方法相比,本发明中的基于自适应动态规划的移动机器人视觉伺服跟踪控制方法,能够通过自适应在线学习的方式实时调整移动机器人速度以应对环境的变化,对于速度不断变化的轨迹也有很好的跟踪效果。
[0036]
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照附图,对本发明作进一步详细的说明。
附图说明
[0037]
构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0038]
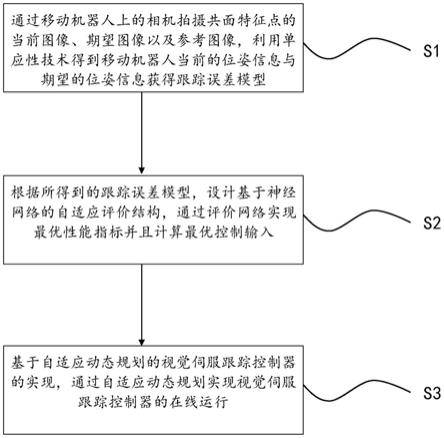
图1为本发明优选实施例中的基于自适应动态规划的移动机器人视觉伺服跟踪控制方法的流程图。
[0039]
图2为本发明优选实施例中的基于自适应动态规划的移动机器人视觉伺服跟踪控制方法的跟踪误差状态轨迹图。
[0040]
图3为本发明优选实施例中的基于自适应动态规划的移动机器人视觉伺服跟踪控制方法的移动机器人期望轨迹与实际运动轨迹曲线。
具体实施方式
[0041]
以下结合附图对本发明的实施例进行详细说明,但是本发明可以由权利要求限定和覆盖的多种不同方式实施。
[0042]
实施例一:
[0043]
如图1所示,本发明公开了一种基于自适应动态规划的移动机器人视觉伺服跟踪控制方法,包括以下步骤:
[0044]
通过移动机器人上的摄像机拍摄共面特征点的当前图像、期望图像以及参考图像;基于所述当前图像、期望图像以及参考图像,并利用单应性技术计算移动机器人当前的位姿信息与期望的位姿信息;基于计算得到的移动机器人当前的位姿信息与期望的位姿信息,并结合机器人运动学获得跟踪误差模型;
[0045]
将跟踪误差模型的最优控制问题转化为求解哈密顿-雅可比-贝尔曼方程;利用移动机器人的实际状态信息,使用自适应在线学习算法求解哈密顿-雅可比-贝尔曼方程,得到最优值函数,以最优值函数对应的最优控制输入控制所述移动机器人。
[0046]
本发明中的基于自适应动态规划的移动机器人视觉伺服跟踪控制方法,不仅能够实现移动机器人利用视觉信息完成轨迹跟踪任务和保证系统稳定性,还能实现期望的最优性能指标,降低控制成本的同时还能提高移动机器人跟踪效果,改善控制器性能。
[0047]
实施例二:
[0048]
实施例二是实施例的拓展实施例,其与实施例一的不同之处在于,对于基于自适应动态规划的移动机器人视觉伺服跟踪控制方法的具体步骤进行了细化:
[0049]
在本实施例中,如图1所示,公开了一种基于自适应动态规划的移动机器人视觉伺服跟踪控制方法;包括:
[0050]
步骤s1:通过移动机器人上的摄像机拍摄共面特征点的当前图像、期望图像以及参考图像,利用单应性技术得到移动机器人当前的位姿信息与期望的位姿信息(即平移量与旋转角度),结合机器人运动学获得跟踪误差模型:
[0051]
步骤s11:设置移动机器人与装载于其上的摄像机的坐标系相重合,选择空间中四个共面特征点为目标点,由摄像机拍摄的特征点图像获取可测得的像素坐标,并根据针孔摄像机模型进行欧式重构,归一化的三维坐标由mi=k-1
pi计算得到,其中k为摄像机标定矩阵,pi为齐次像素坐标;
[0052]
步骤s12:利用移动机器人当前的、期望的和参考的归一化三维坐标计算出移动机器人当前位置、期望位置分别相对参考位置的单应性矩阵,基于单应性技术得到移动机器人当前位姿与期望位姿;
[0053]
步骤s13:通过坐标系变换,将期望位姿信息转换到当前摄像机坐标系中描述,然后计算移动机器人位姿误差e(t),基于移动机器人运动学模型得到跟踪误差模型
[0054]
具体而言,步骤s1包括以下内容:
[0055]
将当前的摄像机坐标系记为fc,fc的原点为摄像机光心,x轴方向与移动机器人轮轴平行,z轴方向为摄像机光轴方向,y轴垂直于移动机器人运动平面xz,以fd和f
*
分别表示期望轨迹的摄像机坐标系与固定参考坐标系;选取四个特征点,其在摄像机fc下可测得的齐次像素坐标为由下式可计算出特征点在fc中的归一化三维坐标:
[0056]mic
=k-1
p
ic
[0057]
其中,k为摄像机标定矩阵,特征点在fd和f
*
中的归一化三维坐标分别为和由其单应性关系可以计算出单应性矩阵hc,hd,使用直接线性变换算法将hc分解得到对应的平移与旋转量[x,z,θ]
t
,hd分解得到[xd,zd,θd]
t
,位姿误差定义为:
[0058][0059]
其中t为坐标系fc与fd之间的变换矩阵,移动机器人运动学模型表示为:
[0060][0061]
其中v,ω分别表示移动机器人线速度与角速度,然后对误差e(t)求关于时间的导数,结合移动机器人运动学模型,得到跟踪误差模型:
[0062]
步骤s2:根据所得到的跟踪误差模型,设计基于神经网络的自适应评价结构,通过评价网络实现最优性能指标并且计算最优控制输入:
[0063]
步骤s21:将跟踪误差模型的最优控制问题转化为求解哈密顿-雅可比-贝尔曼方程;
[0064]
步骤s22:使用评价神经网络逼近值函数并计算最优控制输入,设计基于神经网络的自适应评价结构。
[0065]
步骤s3:基于自适应动态规划的视觉伺服跟踪控制器的实现,通过自适应动态规划实现视觉伺服跟踪控制器的在线运行:
[0066]
步骤s31:利用误差模型状态e(t)和跟踪误差模型状态方程通过如下方法进行学习更新神经网络的权值:
[0067][0068]
其中,w(t)为神经网络权值,φ(e(t))为神经网络的激活函数,符号表示对关于e(t)求偏导,l(e(t),u(e(t)))表示效用函数,α>0为神经网络权值的学习速率;
[0069]
步骤s32:使用如下方法实时计算控制输入信号:
[0070][0071]
其中,r为对称正定矩阵,g(e(t))为控制矩阵。
[0072]
具体而言,将跟踪误差模型的最优控制问题转化为求解如下形式的哈密顿-雅可比-贝尔曼方程:
[0073][0074]
其中,表示对关于时间t求偏导,v
*
(e,t)为待求得最优值函数,q(e)为正定函数,
[0075]
利用实际系统的状态信息,使用自适应在线学习算法求解哈密顿-雅可比-贝尔曼方程得到最优值函数v
*
(e,t)。
[0076]
其中,自适应在线学习算法包括:
[0077]
1)基于当前实际系统的状态信息求解如下方程,计算v(e,t):
[0078]
其中,τ为参数t的替换。
[0079]
2)使用如下方法计算控制输入信号:
[0080][0081]
3)在线不断学习,重复执行前两步使得自适应在线学习算法收敛。
[0082]
为了实现上述自适应在线学习算法,设计基于神经网络的自适应评价结构,使用评价神经网络逼近值函数并计算最优控制输入,使用公式(1)更新评价神经网络的权值,并且使用公式(2)在线实时计算控制输入信号,作用于移动机器人视觉伺服轨迹跟踪过程。图2展示了本发明移动机器人视觉伺服轨迹跟踪控制的系统状态仿真图,图3展示了本发明移
动机器人视觉伺服轨迹跟踪控制的期望轨迹与移动机器人实际运动轨迹曲线图,由此可以看出,跟踪误差的收敛速度快,控制效果好。
[0083]
综上所述,本发明中的基于自适应动态规划的移动机器人视觉伺服跟踪控制方法,不仅能够实现移动机器人利用视觉信息完成轨迹跟踪任务和保证系统稳定性,还能实现期望的最优性能指标,降低控制成本的同时还能提高移动机器人跟踪效果,改善控制器性能。
[0084]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1