物流机器人的货仓的制作方法
1.本发明属于物流机器人领域,尤其涉及一种物流机器人的货仓。
背景技术:
2.随着电子商务的日益发展,与之配套的物流产业也在不断发展创新,物流 效率一直是各个电商巨头的痛点。为了提高仓库运营效率,降低物流成本,电 商巨头们纷纷研发物流配送机器人,助推企业仓储物流系统升级优化。现有物 流机器人均包括有货仓,物流机器人通过货仓收纳需要运输的货物。但是现有 的货仓与货物的接触面为硬质表面,极易造成无规则堆积的货物挤压而对货物 造成损伤。
技术实现要素:
3.本发明的目的在于提供一种物流机器人的货仓,旨在解决现有技术中货仓 内堆积的货物相互挤压而造成货物损坏。
4.本发明是这样实现的:
5.一种物流机器人的货仓,包括具有承载台的箱体,所述承载台位于所述箱 体的底部,用于承载货物;所述承载台包括嵌设于所述箱体底部的方形支架、 连接于所述方形支架上的至少两个弹性支撑件,和连接于所述弹性支撑件的至 少一环形支撑件;各所述弹性支撑件交叉设置,且所述弹性支撑件的两端分别 连接于所述方形支架的对角和/或对边上,所述环形支撑件铺设于所述弹性支架 上。
6.进一步地,所述弹性支撑件包括至少两个第一弯曲部和位于两个所述第一 弯曲部之间的第一连接部,所述第一弯曲部和所述第一连接部均具有弹性;所 述第一弯曲部围合形成有第一凹陷区,所述环形支撑件位于所述第一凹陷区并 与所述第一弯曲部固定连接。
7.进一步地,所述环形支撑件包括至少两个第二弯曲部和位于两个所述第二 弯曲部之间的第二连接部;所述第二弯曲部和所述第二连接部均具有弹性;所 述第二弯曲部围合形成有第二凹陷区,所述第一弯曲部穿设于所述第二凹陷区, 所述第二弯曲部穿设于所述第一凹陷区,且所述第一弯曲部与所述第二弯曲部 固定连接。
8.进一步地,所述环形支撑件为可弹性形变的形变弹性件;所述第一弯曲部 内设有限制所述环形支撑件脱离所述弹性支撑件的限制部,所述限制部与所述 第一弯曲部围合形成安装孔,所述环形支撑件通过穿设所述安装孔安装于所述 第一弯曲部,且所述环形支撑件能够在安装孔内滑移。
9.进一步地,所述第一凹陷区具有开口,所述第一凹陷区的开口朝向所述箱 体的顶部设置。
10.进一步地,所述方形支架的顶部设有柔性基体,所述弹性支撑件和所述环 形支撑件位于所述方形支架内;所述柔性基体覆盖于所述方形支架上,且所述 弹性支撑件和所述环形支撑件位于所述柔性基体的下方,所述柔性基体抵接于 所述弹性支撑件上。
11.进一步地,所述箱体具有容纳腔体,且所述容纳腔体位于所述承载台的下 方;所述物流机器人的货仓还包括位于所述容纳腔体的底部的摄像模块,和与 所述摄像模块通讯连接的终端;所述柔性基体采用透光材质制成。
12.进一步地,所述物流机器人的货仓还包括计时模块;所述计时模块与所述 摄像模块电性连接,所述计时模块内设有额定时间值。
13.进一步地,所述承载台的下方还设有多个均匀设置的发光体,所述发光体 位于所述容纳腔体的底部,所述摄像模块位于多个所述发光体组成的阵列的中 心位置。
14.进一步地,所述容纳腔体的周向壁上设有激光发射单元,以及与所述激光 发射单元对称设置的激光接收单元,所述激光接收单元用于接收所述激光发射 单元所发出的光线;所述激光接收单元与所述终端通讯连接。
15.本发明的有益效果在于:通过将弹性支撑件的两端分别连接于方形支架的 对角上,以便于环形支撑件平铺于弹性支撑件上,以形成用于支撑货物并具有 弹性的承载面,进而使得箱体的承载台为具有弹性的承载台,以有效减少多个 货物无规则叠放时导致货物损坏的情况发生,即货物无规则堆放时能够通过具 有弹性的承载台形成弹性避让。
附图说明
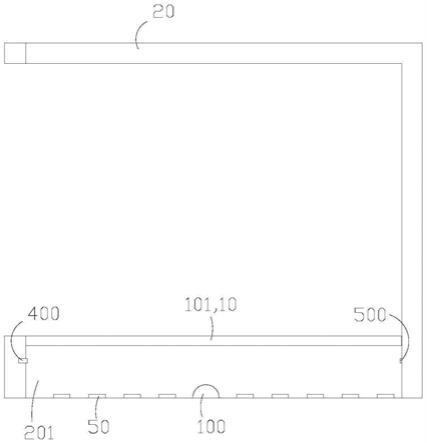
16.图1是本发明实施例提供的物流机器人的货仓的示意图;
17.图2是本发明实施例提供的物流机器人的货仓的承载台的示意图;
18.图3是本发明实施例一的图2中a-a处的剖面示意图;
19.图4是本发明实施例一的图2中b-b处的剖面示意图;
20.图5是本发明实施例二的图2中a-a处的剖面示意图;
21.图6是本发明实施例二的图2中b-b处的剖面示意图;
22.图7是本发明实施例提供的物流机器人的货仓的的摄像模块、终端、计时 模块、激光发射单元和激光接收单元的结构示意图。
23.附图标记:
24.10、承载台;101、方形支架;102、弹性支撑件;112、第一弯曲部;122、 第一连接部;132、第一凹陷区;103、环形支撑件;113、第二弯曲部;123、 第二连接部;133、第二凹陷区;
25.20、箱体;201、容纳腔体;
26.30、限制部;301、安装孔;
27.40、柔性基体;
28.50、发光体;
29.100、摄像模块;
30.200、终端;
31.300、计时模块;
32.400、激光发射单元;
33.500、激光接收单元。
具体实施方式
34.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实 施例,
对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅 仅用以解释本发明,并不用于限定本发明。
35.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可 以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为“连接 于”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
36.还需要说明的是,本实施例中的左、右、上、下等方位用语,仅是互为相 对概念或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。
37.实施例一
38.如图1至图4所示,为本发明实施例提供的一种物流机器人的货仓,包括 具有承载台10的箱体20,所述承载台10位于所述箱体20的底部,用于承载 货物;所述承载台10包括嵌设于所述箱体20底部的方形支架101、连接于方 形支架101上的至少两个弹性支撑件102,和设于所述至少两个弹性支撑件102 上的至少一个环形支撑件103,其中,方形支架101也可以是圆形支架,或者 其他规则形状的支架,便于安装和拆卸即可。本实施例中方形支架101为正方 形支架,弹性支撑件102可以是三个、四个、或五个,本实施例采用四个弹性 支撑件102,四个弹性支架分别设置在方形支架101的对角,以及对边的中心 之间的位置上,以使承载台10的承载力更加均衡;两个所述弹性支撑件102 交叉设置,且所述弹性支撑件102的两端分别连接于所述方形支架101的对角 上,所述环形支撑件103平铺于所述弹性支架件上,通过将弹性支撑件102的 两端分别连接于方形支架101的对角上,以便于环形支撑件103平铺于弹性支 撑件102上,以形成用于支撑货物并具有弹性的承载面,进而使得箱体20的承 载台10为具有弹性的承载台10,以有效减少多个货物无规则叠放时导致货物 损坏的情况发生,即货物无规则堆放时能够通过具有弹性的承载台10形成弹性 避让。
39.参见图3和图4,所述弹性支撑件102包括至少两个第一弯曲部112和位 于两个所述第一弯曲部112之间的第一连接部122,所述第一弯曲部112和所 述第一连接部122均具有弹性;所述第一弯曲部112上具有第一凹陷区132, 所述环形支撑件103位于所述第一凹陷区132并与所述第一弯曲部112固定连 接,通过设置第一凹陷区132,以便于所述环形支撑件103安装于所述第一弯 曲部112上,另通过第一弯曲部112和第一连接部122的同时具有弹性的设定, 以便于货物无规则堆积时挤压弹性支撑件102而形变。
40.参见图3和图4,所述环形支撑件103包括至少两个第二弯曲部113和位 于两个所述第二弯曲部113之间第二连接部123;所述第二弯曲部113和所述 第二连接部123均具有弹性;所述第二弯曲部113上具有第二凹陷区133,当 所述环形支撑件103与所述弹性支撑件102连接时,所述第一弯曲部112位于 所述第二凹陷区133内,所述第二弯曲部113位于所述第一凹陷区132内,且 所述第一弯曲部112与所述第二弯曲部113固定连接。通过第一弯曲部112与 第二弯曲部113的连接,以便于承载台10受到无规则的货物挤压时,弹性支撑 件102和环形支撑件103的弹性张开的能力增强,并且通过第一凹陷区132和 第二凹陷区133的设置,使得第一弯曲部112和第二弯曲部113连接后难以脱 离,同时也限制了弹性支撑件102和环形支撑件103的位置。
41.其中,参见图3,所述第一凹陷区132具有开口,所述第一凹陷区132的 开口朝向所述箱体20的顶部设置,以使得安装于第一凹陷区132的环形支撑件103在受到货物挤压时也难以脱离弹性支撑件102,进而有效地确保弹性支撑件 102和环形支撑件103弹性支撑货物
的稳定性。
42.参见图3和图4,所述方形支架101的顶部设有柔性基体40,所述弹性支 撑件102和所述环形支撑件103位于所述方形支架101内,其中,柔性基体40 可以是具有弹性的布、皮制件或海绵等;所述柔性基体40覆盖于所述方形支架 101上,且所述弹性支撑件102和所述环形支撑件103位于所述柔性基体40的 下方,所述柔性基体40抵接于所述弹性支撑件102上,以通过将柔性基体40 设置在承载台10上,以有效的减少货物因堆放在货仓内而受到损坏,另通过将 柔性基体40设置在弹性支撑件102和环形支撑件103上,以使得货物无规则堆 放时,货物能够通过挤压柔性基体40而使弹性支撑件102和环形支撑件103 发生形变而提供给货物更多的承载空间。
43.参见图1、图4和图7,所述箱体20具有容纳腔体201,且所述容纳腔体 201位于所述承载台的下方;所述物流机器人的货仓还包括位于所述容纳腔体 201的底部的摄像模块100,和与所述摄像模块100通讯连接的终端300;所述 柔性基体40为能够透光的材质件;所述摄像模块100通过采集所述柔性基体 40的图像信息,并将图像信息发送至所述终端300,所述终端300根据所述图 像信息与原所述柔性基体40的图像信息进行比较,以判断所述柔性基体40的 损耗情况.通过摄像模块100实时监测柔性基体40的使用损坏,以便于用户能 够即时的更换损坏的柔性基体40,而增加对弹性支撑件102和环形支撑件103 的保护和提升两者的使用寿命。
44.所述物流机器人的货仓还包括计时模块200;所述计时模块与所述摄像模 块100电性连接,所述计时模块内设有额定时间值;当所述额定时间值倒数完 之后,所述摄像模块100采集所述柔性基体40的图像信息,通过设置计时模块 200,以限制摄像模块100在计时模块200设定的额定时间值倒数完成之后拍摄, 使得额定时间每倒数一次,摄像模块100拍摄一次,以达到不仅减少摄像模块 100长时间的启动而增加损耗的目的,而且还能持续的监测柔性基体40的使用 情况。
45.参见图1、图3和图7,所述承载台的下方还设有多个均匀设置的发光体 50,所述发光体50位于所述容纳腔体201的底部上,所述摄像模块100位于多 个所述发光体50组成的阵列的中心位置上,通过将摄像模块100设定在多个发 光体50的中心位置,以便于发光体50均匀照射至柔性基体40上的光,更好的 将柔性基体40的透光处曝露,以便于摄像模块100采集柔性基体40的透光处。
46.参见图1、图3和图7,所述容纳腔体201的周向壁上设有激光发射单元 400,以及与激光发射单元400对称设置的激光接收单元500,所述激光发射单 元400的光线照射至所述激光接收单元500上;所述激光接收单元500与所述 终端300通讯连接;当所述弹性支撑件102和所述环形支撑件103在货物的挤 压下,切断所述激光发射单元400的照射至所述激光接收单元500的光线,所 述激光接收单元500未接收所述激光发射单元400的光线时产生警报信号,并 将所述警报信号发送至所述终端300。通过激光发射单元400的光线照射至所 述激光接收单元500上,以监测物流机器人的货仓内的货物堆积是否超标,当 激光接收单元500未接收到光线时,则货仓内的货物超标,终端300接收到激 光接收单元500所产生的警报信号,并发送给用户,以提醒用户货物超标的信 息;当然,检测货物超标也是对弹性支撑件102和环形支撑件103的保护,以 减少两者因货物堆积超标而过渡形变。
47.实施例二
48.参见图5和图6,所述环形支撑件103为可弹性形变的形变弹性件,即环 形支撑件103可以是橡胶圈,也可以是硅胶圈,还可以是首尾相接的弹簧;所 述第一弯曲部112内设有限制所述环形支撑件103脱离所述弹性支撑件102的 限制部30,所述限制部30与所述第一弯曲部112围合形成安装孔301,所述环 形支撑件103通过穿设所述安装孔301安装于所述第一弯曲部112上,且因环 形支撑件103仅穿过安装孔103设置,因此所述环形支撑件103能够在安装孔 301内滑移,通过限制部30与第一弯曲部112围合形成安装孔301,使得环形 支撑件103通过安装孔301固定于弹性支撑件102上,并能够在安装孔301内 滑移,进而使得环形支撑件103随弹性支撑件102发生形变时,环形支撑件103 不仅能够发生形变还能够移动,以便于货物作用在环形支撑件103上的力随环 形支撑件103的移动而转移至弹性支撑件102上,进而减少环形支撑件103的 损耗。
49.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发 明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明 的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1