一种具有组装拆卸功能的教育用简易机器人的制作方法
1.本实用新型涉及机器人技术领域,具体为一种具有组装拆卸功能的教育用简易机器人。
背景技术:
2.机器人教育是指通过组装、搭建、运行机器人,激发学生学习兴趣、培养学生综合能力;技术融合了机械原理、电子传感器、计算机软硬件及人工智能等众多先进技术,为学生能力、素质的培养承载着新的使命;
3.然而目前大部分的机器人教育,不能对机器人进行组装拆卸,从而不能让学生对机器人有更直观的感受,机器人造价较高,由于资金缺乏,阻碍了机器人教育的发展,因此我们提出了一种具有组装拆卸功能的教育用简易机器人。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本实用新型公开了一种具有组装拆卸功能的教育用简易机器人,以解决上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本实用新型通过以下技术方案予以实现:一种具有组装拆卸功能的教育用简易机器人。
8.机器身体,所述机器身体的上表面插接有固定块,且固定块的上表面安装有机器头,所述机器身体的两侧均插接有第一连接块,且第一连接块远离机器身体的一侧连接有机器手臂,所述机器身体的下表面插接有两个第二连接块,且两个第二连接块远离机器身体的一端连接有机器腿;
9.限位机构,所述第一连接块和第二连接块靠近机器身体的一侧均安装有限位杆,且限位杆插接在机器身体内,所述限位机构安装在限位杆内;
10.卡接机构,所述机器身体的一侧开设有圆孔,且卡机机构通过圆孔安装在机器身体的内部。
11.优选的,限位机构包括两个限位槽,两个所述限位槽开设的限位杆的外表面,且限位槽内壁安装有第一弹性件,所述第一弹性件远离限位槽的一端安装有限位块。
12.优选的,卡机机构包括连接杆,所述连接杆插接在机器身体的一侧,且连接杆贯穿机器身体的内侧壁,所述连接杆的一端安装有移动板,且连接杆的外表面套接有第二弹性件,所述第二弹性件的两端分别安装在机器身体的内侧壁上和移动板的一侧。
13.优选的,卡接机构还包括多个第一卡块和多个第二卡块,多个所述第一卡块和多个第二卡块安装在移动板远离移动杆的一侧,且第一卡块和第二卡块的一侧与限位杆的一侧相贴合。
14.本实用新型公开了一种具有组装拆卸功能的教育用简易机器人,其具备的有益效
果如下:
15.1、该一种具有组装拆卸功能的教育用简易机器人,通过设置的第一连接块、第二连接块、限位杆、固定块、限位槽、第一弹性件和限位块的配合,使机器人的四肢和头脑店铺可以拆卸组装。
16.2、该一种具有组装拆卸功能的教育用简易机器人,通过设置的第一卡块、第二卡块、连接杆、第二弹性件和移动板的配合,使拉动连接杆的时候机器人的四肢和头脑同时拆卸。
附图说明
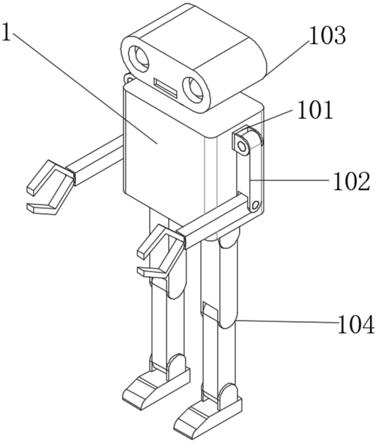
17.图1为本实用新型结构示意图;
18.图2为本实用新型机器身体内部结构示意图;
19.图3为本实用新型a处结构放大示意图;
20.图4为本实用新型连接杆结构示意图;
21.图中:1、机器身体;101、第一连接块;102、机器手臂;103、机器头; 104、机器腿;105、固定块;106、移动板;107、第二连接块;108、第一卡块;109、第二卡块;2、限位杆;201、限位槽;202、第一弹性件;203、限位块;204、连接杆;205、第二弹性件。
具体实施方式
22.在本发明的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
23.本发明使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制。
24.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
25.本实用新型实施例公开一种具有组装拆卸功能的教育用简易机器人,如图1-4所示,包括
26.参照附图1和附图2,机器身体1,机器身体1的上表面活动插接有固定块105,且固定块105的上表面固定连接有机器头103,机器身体1的两侧均活动插接有第一连接块101,且第一连接块101远离机器身体1的一侧转动连接有机器手臂102,机器身体1的下表面活动插接有两个第二连接块107,且两个第二连接块107远离机器身体1的一端转动连接有机器腿104;
27.限位机构,第一连接块101和第二连接块107靠近机器身体1的一侧均固定连接有限位杆2,且限位杆2活动插接在机器身体1内,限位机构安装在限位杆2内;
28.卡接机构,机器身体1的一侧开设有圆孔,且卡机机构通过圆孔安装在机器身体1的内部。
29.参照附图3,限位机构包括两个限位槽201,两个限位槽201开设的限位杆2的外表面,且限位槽201内壁固定连接有第一弹性件202,第一弹性件 202远离限位槽201的一端固定连接有限位块203。
30.参照附图4,卡机机构包括连接杆204,连接杆204插接在机器身体1的一侧,且连接杆204贯穿机器身体1的内侧壁,连接杆204的一端固定连接有移动板106,且连接杆204的外表面套接有第二弹性件205,第二弹性件205 的两端分别固定连接在机器身体1的内侧壁上和移动板106的一侧;
31.卡接机构还包括多个第一卡块108和多个第二卡块109,多个第一卡块 108和多个第二卡块109固定连接在移动板106远离移动杆的一侧,且第一卡块108和第二卡块109的一侧与限位杆2的一侧相贴合。
32.工作原理:当一种具有组装拆卸功能的教育用简易机器人使用时,当拆卸机器人的时候,首先拉动连接杆204,连接杆204移动带动移动板106移动并压缩第二弹性件205,移动板106移动带动第一卡块108和第二卡块109移动,从而使第一卡块108、第二卡块109与限位杆2不接触,从而可以将四肢和脑袋同时拆卸下来;
33.安装的时候只需要将限位杆2对准机器身体1上的圆孔插入,限位杆2 与第一卡块108、第二卡块109接触,从而使限位块203向下移动并压缩第一弹性件202,当第一弹性件202反弹的时候带动限位块203向外移动,从而使限位块203的一侧与第一卡块108和第二卡块109的一侧相贴合,则安装完毕,还可以随意组装。
34.综上所述,与现有技术相比,具备以下有益效果:
35.1、通过设置的第一连接块101、第二连接块107、限位杆2、固定块105、限位槽201、第一弹性件202和限位块203的配合,使机器人的四肢和头脑店铺可以拆卸组装。
36.2、通过设置的第一卡块108、第二卡块109、连接杆204、第二弹性件 205和移动板106的配合,使拉动连接杆204的时候机器人的四肢和头脑同时拆卸。
37.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
38.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1