旋转关节组件及机械臂的制作方法
1.本实用新型涉及机械臂领域,特别是涉及一种旋转关节组件及机械臂。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用。
3.机械臂的各关节之间的缝隙需要进行动密封处理,导致机械臂的装配过程较为复杂。
技术实现要素:
4.本实用新型实施例旨在提供一种旋转关节组件及具有此旋转关节组件的机械臂,以解决现有技术中关节之间进行密封处理所导致关节的装配过程较为复杂的技术问题。
5.本实用新型实施例解决其技术问题采用以下技术方案:提供一种旋转关节组件,包括:
6.电机,包括定子和转子;
7.第一关节,收容所述电机,并固定连接所述定子;
8.第二关节,所述第二关节的末端套设于所述第一关节的末端的外周,并固定连接所述转子,所述第二关节的末端的内侧壁与所述第一关节的末端的外侧壁之间具有安装间隙;
9.第一密封环,套设于所述第一关节的末端和所述第二关节的末端之间;及
10.第二密封环,套设于所述第一密封环和所述第二关节的末端之间,所述第一密封环和所述第二密封环填充于所述安装间隙。
11.在一些实施例中,所述第一关节的末端呈台阶结构;
12.所述第一密封环套设于所述台阶结构的尺寸较小的一段,所述第二密封环的端部抵接在所述台阶结构的尺寸较大的一段的端面。
13.在一些实施例中,在所述第一关节的末端上沿其周向开设有限位槽,所述第一密封环部分收容于所述限位槽内,以固定于所述第一关节的末端。
14.在一些实施例中,在所述第二密封环的内环面上沿其周向开设有定位槽;
15.所述定位槽用于部分收容所述第一密封环,以将所述第一密封环定位于所述第二密封环。
16.在一些实施例中,所述第二密封环的宽度大于所述第一密封环的宽度;
17.在朝向所述转子的轴向投影中,所述第二密封环的投影覆盖所述第一密封环。
18.在一些实施例中,所述第二关节包括关节主体和转接件;
19.所述关节主体固定连接于所述转接件,所述第二关节的末端设置于所述转接件。
20.在一些实施例中,所述转接件套设于所述关节主体的外周,并通过径向螺栓固定连接所述关节主体。
21.在一些实施例中,所述第二关节还包括护套;
22.所述护套套设于所述转接件的外周,并覆盖所述径向螺栓。
23.在一些实施例中,在所述转接件上沿其周向开设有收容槽;
24.所述护套收容于所述收容槽内。
25.本实用新型实施例解决其技术问题还采用以下技术方案:提供一种机械臂,包括至少一组如上所述的旋转关节组件。
26.与现有技术相比,在本实用新型实施例提供的旋转关节组件及具有此旋转关节组件的机械臂中,第二关节的末端在套设于第一关节的末端的外周的过程中,带动第二密封环朝向第一密封环移动,直至第二密封环套设于第一密封环的外周,第二密封环能够自动地套设于第一密封环的外周,装配过程较为简单。
附图说明
27.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
28.图1是本实用新型其中一实施例提供的一种机械臂的结构示意图;
29.图2是图1所示的机械臂的旋转关节组件的拆解示意图;
30.图3是图2所示的旋转关节组件的剖面示意图;
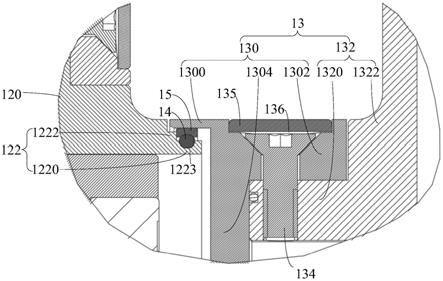
31.图4是图3所示的a处的局部放大图;
32.图5是图2所示的旋转关节组件的第一关节的剖面示意图;
33.图6是图2所示的旋转关节组件的第二密封环的剖面示意图。
具体实施方式
34.为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。需要说明的是,当元件被表述“连接”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“左”、“右”、“上端”、“下端”、“顶部”以及“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、等仅用于描述目的,而不能理解为指示或暗示相对重要性。
35.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本实用新型。
36.请参阅图1,本实用新型其中一实施例提供一种机械臂100,包括至少一组旋转关节组件10。
37.请参阅图2和图3,在本实施例中,以其中一组旋转关节组件10为例进行说明,该旋转关节组件10包括电机11、第一关节12、第二关节13、第一密封环14以及第二密封环15。电机11包括定子110和转子112。第一关节12收容电机11,并固定连接电机11的定子110。第二关节13的末端套设于第一关节12的末端的外周,并固定连接电机11的转子112。第二关节13
的末端的内侧壁与第一关节12的末端的外侧壁之间具有安装间隙。第一密封环14套设于第一关节12的末端和第二关节13的末端之间。第二密封环15套设于第一密封环14和第二关节13的末端之间。第一密封环14和第二密封环15填充于安装间隙,以将安装间隙密封。在电机11工作时,电机11带动第一关节12相对于第二关节13转动,在此过程中,第一关节12通过摩擦力带动第一密封环14一并转动,第二关节13通过摩擦力使第二密封环15保持固定,以使第一密封环14和第二密封环15相对转动,从而实现对第一关节12和第二关节13的动密封处理。
38.第二关节13的末端在套设于第一关节12的末端的外周的过程中,能够通过摩擦力带动第二密封环15朝向第一密封环14移动,直至第二密封环15套设于第一密封环14的外周,第二密封环15能够自动地套设于第一密封环14的外周,装配过程较为简单。
39.第一关节12包括第一腔体120和第一套接部122。第一套接部122设置于第一腔体120的一侧,并连通第一腔体120。
40.第一腔体120用于收容电机11。在第一腔体120的腔壁上凸设有电机固定板,用于固定连接电机11的定子110。
41.第一套接部122为第一关节12的末端。
42.请结合图4和图5进行参阅,第一套接部122呈台阶结构,包括尺寸较小的第一段1220和尺寸较大的第二段1222。第二段1222连接于第一腔体120和第一段1220之间。第一密封环14套设于第一段1220的外周,第二段1222的端面抵靠第二密封环15的端部。
43.第二关节13的末端在套设于第一套接部122的外周的过程中,带动第二密封环15朝向第一密封环14移动,直至第二密封环15的端部抵靠于第二段1222的端面。此时,第二密封环15停止移动,第二密封环15的位置与第一密封环14的位置相对应,使得第二密封环15套设于第一密封环14的外周。
44.在第一段1220上沿其周向开设有限位槽1223。第一密封环14部分收容于限位槽1223内,以固定于第一段1220,能够在第二密封环15套设于第一密封环14的外周的过程中,第一密封环14不会被第二密封环15推开。
45.第二关节13包括转接件130和关节主体132。转接件130固定连接关节主体132。
46.转接件130包括第二套接部1300、第三套接部1302以及转子连接部1304。第二套接部1300设置于第三套接部1302的一侧,并连通于第三套接部1302,转子连接部1304凸设于第二套接部1300和第三套接部1302的交接处的内壁。第二套接部1300为第二关节13的末端,也即,第二关节13的末端设置于转接件130。
47.第三套接部1302用于套设于关节主体132的外周。
48.转子连接部1304用于固定连接电机11的转子112。
49.关节主体132包括第四套接部1320和第二腔体1322。第四套接部1320设置于第二腔体1322的一侧,并与第二腔体1322相连通。
50.第四套接部套1320套设于第三套接部1302的内周,并通过径向螺栓134固定连接第三套接部1302,以实现转接件130固定连接关节主体132。在第三套接部1302上开设有沉头孔,径向螺栓134的头部收容于沉头孔内,以避免径向螺栓134的头部突出第三套接部1302的外表面,美观、利于密封,密封的具体方式如后述的护套135。
51.第二腔体1322用于容纳第二关节13的电机。
52.在一些实施例中,第二关节13还包括护套135。护套135大致呈环状,如图2所示。护套135套设于第三套接部1302的外周,并覆盖径向螺栓134。护套135可由具有弹性的橡胶材质制得,用于遮蔽、密封径向螺栓134和第三套接部1302之间的间隙。
53.在一些实施例中,在第三套接部1302上沿其周向开设有收容槽136。护套135收容于收容槽136内,以避免护套135突出于第三套接部1302的外表面,美观、护套135不容易被意外碰撞至脱落。
54.第一密封环14的截面呈圆形、椭圆形或者跑道形,可由弹性材质制得,如橡胶。第一密封环14在套设于第一关节12的末端和第二密封环15之间时,第一密封环14存在一定的压缩,以在第一关节12的末端和第二密封环15之间提供足够的密封压力。
55.第二密封环15可由软质低摩擦系数的材料制得,例如,聚四氟乙烯(poly tetra fluoroethylene,ptfe)。第二密封环15一方面材质比较软,可以在第二关节13的末端和第一密封环15之间形成较好的密封效果,另一方面材质和第一密封环15之间的摩擦系数比较小,不仅耐磨,而且在第一关节12相对于第二关节13转动时所产生的摩擦阻力也比较小,有助于减小摩擦力对关节力感知的影响,从而提高对负载力感知的精度。
56.第二密封环15的宽度大于第一密封环14的宽度。在朝向电机11的转子112的轴向投影中,第二密封环15的投影能够完全覆盖住第一密封环14,确保了密封的效果。
57.请结合图6进行参阅,在一些实施例中,在第二密封环15的内环面上沿其周向开设有定位槽150。定位槽150用于部分收容所述第一密封环14,以将第一密封环14定位于所述第二密封环15。
58.在装配时,具体如下:
59.将电机11装配于第一关节12。将电机11收容于第一腔体120内,电机11的定子110可通过螺钉固定连接电机连接板。电机11的转子112从第一腔体120延伸至第一套接部122处。
60.将第二关节13装配于第一关节12。一方面,将第一密封环14套设于第一段1220的外周,并部分收容于限位槽1223内,另一方面,将第二密封环15套设于第二套接部1300的内周。待第一密封环14套设于第一段1220的外周,并且第二密封环15套设于第二套接部1300的内周时,将第二套接部1300套设于第一套接部122的外周,在此过程中,第二密封环15在第二套接部1300的摩擦力带动下,朝向第一密封环14移动,直至第二密封环15的端部抵靠于第二段1222的端面,此时,第二密封环15停止移动,并套设于第一密封环14的外周。需要注意的是,在第二套接部1300套接于第一套接部122的外周时,第二套接部1300可以未完全套接于第一套接部122的外周。待第二套接部1300完全套接于第一套接部122的外周时,转子连接部1304接触电机11的转子112,可通过轴向螺栓将转子连接部1304固定连接于电机11的转子112,以实现转接件130与电机11的转子112的固定连接。
61.与现有技术相比,在本实用新型实施例提供的旋转关节组件及具有此旋转关节组件的机械臂中,第二关节的末端在套设于第一关节的末端的外周的过程中,带动第二密封环朝向第一密封环移动,直至第二密封环套设于第一密封环的外周,第二密封环自动地套设于第一密封环的外周,装配过程较为简单。
62.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,
步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参阅前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1