一种可旋转的自适应螺丝锁付总成及其锁付控制方法与流程
1.本发明涉及螺丝锁付装置技术领域,尤其涉及一种可旋转的自适应螺丝锁付总成及其锁付控制方法。
背景技术:
2.智能螺丝刀,又称为电动螺丝刀,由电子、电机、机械三大部分组成,是一种装有调节和限制扭矩的机构。在工业生产中,智能螺丝刀主要用于产品螺丝的装配及拆卸,由于其精度高、效率快、可极大降低劳动成本,而成为组装行业必不可缺的电动工具之一。
3.智能螺丝刀根据使用的原理的不同可分为固定式智能螺丝刀和手持式智能螺丝刀。其中,固定式智能螺丝刀的成本较手持式智能螺丝刀要低很多,其成本约为手持式智能螺丝刀的一半,但由于固定式螺丝刀无法手持作业而导致现有的螺丝拧紧装置依旧存在成本过高、使用不方便等问题,有鉴于此,发明人进行了新的发明。
技术实现要素:
4.本发明的目的在于针对现有技术的不足,提供一种可旋转的自适应螺丝锁付总成及其锁付控制方法,其具有低成本、使用便捷的特点。
5.为实现上述目的,本发明是一种可旋转的自适应螺丝锁付总成,包括支架,所述支架连接有手持锁付装置,所述手持锁付装置包括动力连接装置、轴传动装置、手持机构,手持机构与动力连接装置活动连接,且手持机构可相对动力连接装置旋转角度;所述轴传动装置设置于手持机构内侧且可相对于手持机构旋转,动力连接装置设置有可连接外部动力装置的端口,轴传动装置的上端延伸至动力连接装置进行传动。
6.进一步的,所述动力连接装置与手持机构通过第一轴承活动连接。
7.优选的,所述第一轴承为复合轴承,所述复合轴承包括第一滚针轴承和第一滚珠轴承。
8.进一步的,所述轴传动装置通过第二轴承与手持机构连接。
9.优选的,所述第二轴承为复合轴承,所述复合轴承包括第二滚针轴承、连接件和第二滚珠轴承,所述连接件上端与第二滚针轴承连接,连接件下端套接第二滚珠轴承。
10.进一步的,所述手持锁付装置还包括有控制电路,所述控制电路包括第一柔性电路板、第二柔性电路板和连接导线,所述连接导线连通第一柔性电路板和第二柔性电路板。
11.进一步的,所述手持机构设置有控制按钮,所述控制按钮与第一柔性电路板电性连接。
12.优选的,所述手持机构下端连接有用于辅助锁付的显示装置,所述显示装置与第二柔性电路板电性连接。
13.更进一步的,所述支架包括固定轴座,固定轴座包括下底座、固定轴和上底座,所述下底座和上底座分别设置于固定轴两端,所述固定轴活动连接有可上下运动的第一延伸臂且第一延伸臂可绕固定轴旋转角度,所述第一延伸臂外端设置有可与动力连接装置固定
连接的安装部,所述上底座还设置有用于第一延伸臂复位的平衡器,所述固定轴座还设置有用于获取第一延伸臂位置的第一编码器。
14.本发明还包括一种锁付控制方法,包括如下步骤:
15.(1)获取坐标:分别获取锁付对象上各需要锁付螺丝点的坐标 a1,a2,a3
…
an;
16.(2)设定锁付序列:将获取的座标参数按锁付工艺要求进行排列并输入控制中心;
17.(3)锁付加工:操作螺丝锁付总成进行锁付作业;当锁付顺序与设定的锁付序列相同,则螺丝锁付总成依次全部完成;当锁付顺序与设定的锁付序列不同,则当前锁付总成为暂停状态,锁付作业中止;
18.(4)恢复锁付:如当前锁付作业中止,螺丝锁付总成给出中止信号进行提示,重新确定正确锁付序列后,则控制中心自动解除暂停状态。
19.有益效果:与现有技术相比,本发明是一种可旋转的自适应螺丝锁付总成及其锁付控制方法,包括支架,所述支架连接有手持锁付装置,所述手持锁付装包括动力连接装置、轴传动装置、手持机构,手持机构与动力连接装置活动连接,且手持机构可相对动力连接装置旋转角度;所述轴传动装置设置于手持机构内侧且可相对于手持机构旋转,动力连接装置设置有可连接外部动力装置的端口,轴传动装置的上端延伸至动力连接装置进行传动;本发明具有如下优点:1.本装置可代替手持式智能螺丝批,极大降低生产成本;2.手柄部分可随作业需求任意旋转角度,适应锁付环境,使用更为便捷、省力;3.支架设置有编码器实时记录手柄位置,提高锁付精度以及防止螺丝锁付顺序出错,有效提高锁付质量。
附图说明
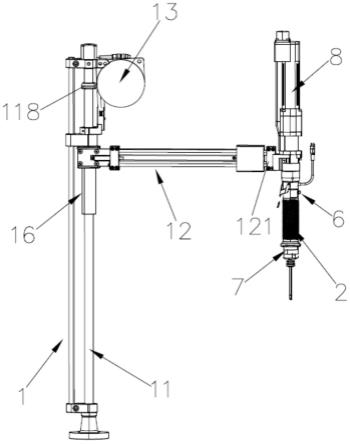
20.图1为本发明的立体示意图。
21.图2为本发明的手持锁付装置结构示意图。
22.图3为本发明的手持锁付装置俯视结构示意图。
23.图4为本发明的手持锁付装置剖面结构示意图。
24.图5为本发明的轴传动装置结构示意图。
25.图6为本发明的第一轴承结构示意图。
26.图7为本发明的手持机构结构示意图。
27.图8为本发明的控制按钮结构示意图。
28.图9为本发明的控制电路结构示意图。
29.图10为本发明的第二轴承结构示意图。
30.图11为本发明的第二延伸臂一实施例结构示意图。
31.图12为本发明的第二延伸臂另一实施例结构示意图。
32.图13为本发明的固定轴座结构示意图。
33.附图标记包括:
34.支架
‑‑
1,固定轴座
‑‑
11,下底座
‑‑
111,固定轴
‑‑
112,上底座
‑‑
113,辅助轴
‑‑
114,连接块
‑‑
115,活动块
‑‑
116,第二直线轴承
‑‑
117,限位块
‑‑
118,第一延伸臂
‑‑
12,安装部
‑‑
121,平衡器
‑‑
13,第一编码器
‑‑
14,第二延伸臂
‑‑
15,第二编码器
‑‑
151,磁铁
‑‑
152,活动组件
‑‑
16,第一直线轴承
‑‑
161,中空管
‑‑
162,手持锁付装置
‑‑
2,动力连接装置
‑‑
21,端口
‑‑
211,轴传动装置
‑‑
22,锁付头
‑‑
221,手持机构
‑‑
23,手握部
‑‑
231,延伸部
‑‑
232,橡胶圈
‑‑
233,第一轴承
‑‑
3,第一滚针轴承
‑‑
31,第一滚珠轴承
‑‑
32,第二轴承
‑‑
4,第二滚针轴承
‑‑
41,连接件
‑‑
42,第二滚珠轴承
‑‑
43,控制电路
‑‑
5,第一柔性电路板
‑‑
51,霍尔元件
‑‑
511,第二柔性电路板
‑‑
52,连接导线
‑‑
53,输出线
‑‑
54,控制按钮
‑‑
6,正向驱动按钮
‑‑
61,把手
‑‑
611,按钮
‑‑
612,按钮座
‑‑
613,复位弹簧
‑‑
614,磁铁
‑‑
615,安装孔
‑‑
616,反向驱动按钮
‑‑
62,显示装置
‑‑
7,照明指示灯
ꢀ‑‑
71,状态显示灯
‑‑
72,外部动力装置
‑‑
8。
具体实施方式
35.下面结合附图1至13对本发明进行详细的说明。
36.本发明是一种可旋转的自适应螺丝锁付总成,包括支架1,所述支架1连接有手持锁付装置2,所述手持锁付装置2包括动力连接装置21、轴传动装置22、手持机构23,手持机构23与动力连接装置 21活动连接,且手持机构23可相对动力连接装置21旋转角度;所述轴传动装置22设置于手持机构23内侧且可相对于手持机构23旋转,动力连接装置21设置有可连接外部动力装置8的端口211,轴传动装置22的上端延伸至动力连接装置21进行传动。使用时,将外部动力装置8与动力连接装置21的端口211进行连接,然后人手握住手持机构23在支架1的配合下移动至指定位置,最后外部动力装置8驱动轴传动装置22旋转进行锁付作业。本技术方案中,动力连接装置21的端口211可外接不同形式的外部动力装置8,只需跟换不同的连接件42即可,外接的外部动力装置8不受限制。
37.本发明相比于传统的锁付装置具有如下优势:其一:本装置连接外部动力装置8后可代替手持式智能螺丝批,极大降低企业的生产成本;其二:本发明的手持机构23可相对动力连接装置21旋转角度。使用时,由于动力连接装置21是与支架1固定连接的,操作手持锁付装置2运动锁付时,手持机构23可相对动力连接装置21旋转角度,操作的员工不需要时刻变换手势以适应作业需求,使用更为便捷、省力;其三:本发明的手持锁付装置2整体结构紧凑,无需占用大量面积。
38.本技术方案中,所述动力连接装置21与手持机构23通过第一轴承3活动连接。利用第一轴承3将动力连接装置21与手持机构23隔开,使得手持机构23可相对动力连接装置21旋转角度而不影响动力连接装置21,结构简洁、紧凑。
39.作为优选的,所述第一轴承3为复合轴承,所述复合轴承包括第一滚针轴承31和第一滚珠轴承32。如图6所示,所述手持机构23 包括一体设置的手握部231和延伸部232,延伸部232延伸进动力连接装置21并与动力连接装置21活动连接,第一轴承3便是套接于延伸部232,并且第一轴承3为复合轴承,第一轴承3包括第一滚珠轴承32,第一滚珠轴承32设置有端面抵接手握部231,固定手持机构 23并将手持机构23与动力连接装置21隔开,使手持机构23可相对动力连接装置21旋转角度。但由于第一滚珠轴承32与手持机构23 的接触面积有限,为进一步固定及提高手持机构23的稳定性,第一滚珠轴承32复合有第一滚针轴承31,增大轴承与手持机构23的接触面积,提高稳定性。另一方面,手握部231是人手握住使用的主要部件,为提高使用的舒适度及增大手与手握部231的摩擦力,手握部 231外部还套接有橡胶圈233。
40.本发明中,所述轴传动装置22通过第二轴承4与手持机构23连接。由于轴传动装置22是主要的锁付零部件,需要与外部动力装置 8连接并进行旋转运动,因此轴传动装置22需要利用第二轴承4与手持机构23隔开,并使轴传动装置22能在手持机构23中独立旋转运
动。另外,轴传动装置22下端用于锁付的锁付头221可以是与轴传动装置22一体设置也可为组装设置,锁付头221可为四方形或六边形等形式。
41.作为优选的,所述第二轴承4为复合轴承,所述复合轴承包括第二滚针轴承41、连接件42和第二滚珠轴承43,所述连接件42上端与第二滚针轴承41连接,连接件42下端套接第二滚珠轴承43。见附图4,与第一轴承3类似,为了提高轴传动装置22旋转的稳定性,第二轴承4复合了第二滚针轴承41和第二滚珠轴承43,不同的是第二轴承4还包括了连接件42,连接件42部分与手持机构23内壁相抵接,起固定第二滚针轴承41和第二滚珠轴承43的位置的作用,另一方面,连接件42也能限定轴传动装置22的位置,提高轴传动装置 22的稳定性。
42.进一步的,所述手持锁付装置2还包括有控制电路5,所述控制电路5包括第一柔性电路板51、第二柔性电路板52和连接导线53,所述连接导线53连通第一柔性电路板51和第二柔性电路板52。所述手持机构23还设置有连接外部控制设备的输出线54,输出线54 与控制电路5电性连接便于外部控制设备设定锁付顺序。
43.作为一实施例,所述手持机构23设置有控制按钮6,所述控制按钮6与第一柔性电路板51电性连接。所述控制按钮6包括正向驱动按钮61和反向驱动按钮62,正向驱动按钮61用于锁付螺丝,反向驱动按钮62则用于拆卸螺丝。本技术方案中,第一柔性电路板51 贴合于第二轴承4的连接件42上,并且第一柔性电路板51上设置有多个霍尔元件511,所述正向驱动按钮61包括把手611、按钮612、按钮座613、复位弹簧614和磁铁615,按钮座613固定设置于手持机构23并且按钮座613设置有连通手持机构23内部的安装孔616,所述按钮612可活动设置于安装孔616上,按钮612前端设置有磁铁 615,按钮612与磁铁615之间套接有复位弹簧614,按钮612可驱动磁铁615与第一柔性电路板51电性连接。需要启动手持锁付装置 2时,将把手611向下按压直到按住按钮612,连接于按钮612前端的磁铁615在按钮612的驱动下靠近第一柔性电路板51上的霍尔元件511,通过电磁感应原理,将启动信号传递至霍尔元件511,进而控制设备启动使用,反向驱动按钮62与正向驱动按钮61结构相同。本发明的控制按钮6相比于机械按钮使用寿命更长,并且设置有把手 611,具有放大控制按钮6的作用,便于人手控制。
44.作为优先的,所述手持机构23下端连接有用于辅助锁付的显示装置7,所述显示装置7与第二柔性电路板52电性连接。所述显示装置7包括多个照明指示灯71和多个状态显示灯72,所述照明指示灯71朝下设置,手持锁付装置2启动时,照明指示灯71同时启动,帮助人眼观察锁付情况。所述状态指示灯72则是用不同颜色显示锁付状态,例如红色代表锁付中、绿色代表锁付完成等情况,并且状态指示灯72是侧面显示光源,便于工人看到指示灯颜色,帮助工人判断锁付情况,有效提高锁付质量。本技术方案中发明人一共在底部设置了三个状态指示灯72,颜色所代表的意思也可由使用者自行定义。为配合显示装置7的使用,第二柔性电路板52相应设置有led灯等元件。
45.本技术方案中,所述支架1包括固定轴座11,固定轴座11包括下底座111、固定轴112和上底座113,所述下底座111和上底座113 分别设置于固定轴112两端,所述固定轴112活动连接有可上下运动的第一延伸臂12且第一延伸臂12可绕固定轴112旋转角度,所述第一延伸臂12外端设置有可与动力连接装置21固定连接的安装部121,所述上底座113还设置有用于第一延伸臂12复位的平衡器13,所述固定轴座11还设置有用于获取第一延伸臂12位置的第一编码器14。使用时,将连接有外部动力装置8的手持锁付装置2固定设置于第一延
伸臂12的安装部121上,人手握住手持锁付装置2以第一延伸臂 12为半径,上下、旋转运动进行打螺丝,支架1与手持锁付装置2 配合灵活度高且能直接替代传统的手持式智能螺丝刀,极大降低生产成本。另一方面,第一延伸臂12设置有第一编码器14获取位置,使用者可事先设定螺丝锁付顺序,使用时,第一编码器14根据设定好的锁付顺序定位第一延伸臂12位置,只有当第一延伸臂12位置正确时,螺丝刀才能启动使用,驱使工人严格按照产品的组装顺序加工产品,利于提高产品的品质;上底座113还设置有平衡器13,可用于平衡螺丝刀的重量,工人只需轻轻用力,便可带动第一延伸臂12运动,有效节省人力,同时,电动螺丝刀在工作时扭矩可通过第一延伸臂12传递至固定轴座11,并由固定轴座11吸收大部分反作用力,有效解决由于电动螺丝刀使用时扭矩较大,容易损伤工人手腕以及人手握不稳等问题,提高锁付稳定性。
46.作为优选的,所述第一延伸臂12包括有活动连接的第二延伸臂 15。在第一延伸臂12的基础上,增设第二延伸臂15,扩大螺丝刀作业范围,使得设备适用范围更广,当然,根据实际需求也可继续增设多个延伸臂。按照上述技术方案,设置于第一延伸臂12外端的安装部121也相应挪动至第二延伸臂15外端。同样的,第二延伸臂15设置有用于获取第二延伸臂15位置的第二编码器151。第二编码器151 的作用与第一编码器14的作用相同,两个编码器相互配合,定位手持锁付装置2进而限定打螺丝顺序,使得设备防错性能好。
47.作为一实施例,所述第二延伸臂5可为直线型伸缩臂,当作业范围超出第一延伸臂12的长度时,第二延伸臂15作为加长臂从第一延伸臂12中拉出增长半径,不用时向前推入第一延伸臂12中,满足生产需求,所述第二编码器151相应为直线型编码器。
48.作为另一实施例,所述第二延伸臂15也可为折叠臂,同样当作业范围超出第一延伸臂12的长度时,折叠形的延伸臂可作为第一延伸臂12的加长臂增长作业半径,同时折叠臂又能以第一延伸臂12外端为圆心,重新定义出一个不同圆形半径的作业范围,相比于直线型的伸缩臂实施例,此实施例的适用范围更广。由于折叠臂是沿第一延伸臂12旋转运动,因此,此实施例中,所述第二编码器151相应为旋转编码器。
49.作为优选的,所述第一延伸臂12设置有用于吸附第二延伸臂15 的磁铁152。延伸臂一般为金属材料制作,当不使用锁付支架1时,为将延伸臂收好,不占用位置,发明人在第一延伸臂12设置有用于吸附第二延伸臂15的磁铁152,当第二延伸臂15为直线型伸缩臂时,见附图12,磁铁152设置于第一延伸臂12的外端位置;当第二延伸臂15为折叠臂时,磁铁152设置于第一延伸臂12侧面。
50.本发明中,所述第一延伸臂12通过活动组件16与固定轴 112活动连接。进一步的,所述活动组件16包括第一直线轴承161 和中空管162,所述第一直线轴承161与固定轴112活动连接,所述中空管162固定套接于第一直线轴承161,所述第一延伸臂12的连接端与中空管162固定连接。本技术方案通过在中空管162内部设置直线轴承的方式驱使第一延伸臂12可沿固定轴112上下运动,且第一延伸臂12可沿固定轴112转动,稳定性好。
51.本技术方案中,所述平衡器13固定设置于上底座113,且与活动组件7连接。平衡器13为能驱动第一延伸臂12复位,除一端固定设置于上底座113外,另一端则需要与第一延伸臂12连接,为简化结构,将平衡器13一端与中空管162固定连接。
52.如图13所示,所述固定轴座11还设置有辅助轴114,所述辅助轴114上端与上底座113固定连接,下端通过连接块115与固定轴112 固定连接,辅助轴114中部设置有活动块
116,所述活动块116通过第二直线轴承117与辅助轴114连接,活动块116另一端固定连接中空管162。固定轴112作为支撑第一延伸臂12运动的零部件,当第一延伸臂12运动速度过快或者连接的电动激光头过重时,为进一步提高锁付支架1的稳定性,发明人在固定轴座11上还设置有辅助轴 114,辅助轴114与固定轴112平行设置,并通过设置活动块116辅助固定轴112,提高设备稳定性。
53.作为优选的,所述固定轴112设置有用于限定中空管162位置的限位块118。锁付支架1使用时,根据使用需要,中空管162不停上下运动,为避免中空管162碰撞平衡器13,损坏设备,在固定轴112 相应的位置设置有限位块118,限位块118的位置可调,可根据实际需要调整其位置。
54.本发明还包括一种锁付控制方法,包括如下步骤:
55.(1)获取坐标:分别获取锁付对象上各需要锁付螺丝点的坐标 a1,a2,a3
…
an;
56.(2)设定锁付序列:将获取的座标参数按锁付工艺要求进行排列并输入控制中心;
57.(3)锁付加工:操作螺丝锁付总成进行锁付作业;当锁付顺序与设定的锁付序列相同,则螺丝锁付总成依次全部完成;当锁付顺序与设定的锁付序列不同,则当前锁付总成为暂停状态,锁付作业中止;
58.(4)恢复锁付:如当前锁付作业中止,螺丝锁付总成给出中止信号进行提示,重新确定正确锁付序列后,则控制中心自动解除暂停状态。
59.此锁付控制方法不仅能严格限制操作人员按照预定的锁付顺序去锁付螺丝,规范作业,而且能有效提高产品的质量,提高良品率。
60.以上内容仅为本发明的较佳实施例,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1