一种穿戴式肩部助力外骨骼的制作方法
1.本实用新型涉及外骨骼技术领域,具体说是一种穿戴式肩部助力外骨骼。
背景技术:
2.随着社会发展,社会开始逐渐步入老龄化,在一些如建筑、装修等行业自动化程度不高,需要大量体力劳动参与的场景里,又或者需要长时间保持托举姿势作业的场景里,中老年劳动者比例仍然占较高水平。这些劳动者由于年龄较大,体力有限,参与的工作体力又消耗较大,容易出现体力透支等现象,长时间工作后影响身体健康,轻则降低工作效率,严重则威胁生命安全。
3.机械外骨骼是一种在体外的辅助人体助力的设备。目前,外骨骼逐渐从医疗康复领域往工业领域发展。外骨骼根据功能分类可分为肩部助力外骨骼、腰部助力外骨骼以及负重外骨骼等。根据动力源分类可分为动力外骨骼和无源外骨骼,动力外骨骼通过设计电机或气缸等可实现较大的助力,但体积较大,舒适性较差,在上述场景不适用;无源外骨骼使用储能元件如弹簧、弹力带等元件实现助力。由于人体身体构造的原因,在抬升手臂时,不管手臂处于任何位置都是费力的,当手臂抬起尤其在手臂上有工具或者重物时,长时间后肩部肌肉容易出现疲劳。
技术实现要素:
4.针对上述问题,本实用新型提供一种无需外部动力驱动、穿戴方便、通过简单机械结构实现对人体手臂提供恒定向上的支撑力的穿戴式肩部助力外骨骼。
5.本实用新型解决上述技术问题所采用的技术方案为:一种穿戴式肩部助力外骨骼,包括穿戴组件、助力组件和手臂支撑组件,所述穿戴组件包含设有腰部固定板的腰带,所述助力组件包括拉簧、拉绳和支撑杆,所述支撑杆一端活动连接固定于腰部固定板上的底座,所述支撑杆另一端与转接块支点转动相连,所述拉簧的一端通过第一调节器连接于支撑杆上的支座,拉簧远离支座的另一端通过拉绳连接于调节块,所述调节块通过设于转接块一端的第二调节器的调节滑动于转接块内滑槽一,所述转接块将助力组件产生的助力传递给另一端连接的手臂支撑组件。
6.作为优选,所述手臂支撑组件包括连杆一、连杆二和手臂箍套,所述连杆一首端与转接块相连,所述连杆二滑动连接于连杆一上的滑槽二并通过旋钮把手进行固定,所述连杆二远离连杆一的一端通过快装件与手臂箍套相连,所述手臂箍套用于包裹使用者的手臂。
7.作为优选,所述快装件包括卡座和卡爪,所述卡座底部设有用于卡爪滑动的凹槽,所述凹槽内设有嵌入卡爪上卡槽一的挡块,所述卡槽一内还设有抵接挡块与卡爪一端的弹簧,所述卡爪插入卡座的另一端与穿过卡座顶部的插销上的卡槽二契合相抵接,所述卡爪的滑动方向与插销的插入方向相互垂直,所述插销远离卡爪的一端与手臂箍套相连,且所述插销与卡座保持相对运动。
8.作为优选,所述转接块包括拼接的两个镜像零件,所述滑槽一设有两个,且两个滑槽一呈对称设置设于两个镜像零件相对一侧。
9.作为优选,所述穿戴组件还包含有两个肩带,所述肩带的首端和尾端分别连接于腰带的前部和后部,所述肩带和腰带上均设有至少一组卡扣。
10.作为优选,所述滑槽一与转接块支点的连线和手臂支撑组件平移至转接块支点处与转接块支点的连线成夹角设置,且所述转接块上沿滑槽一方向设有助力刻度。
11.作为优选,所述腰带后部设有供底座滑动的滑槽二,所述底座通过紧固件固定于滑槽二内。
12.作为优选,所述支撑杆一端通过球头关节与底座活动连接,所述支撑杆另一端与转接块支点铰接。
13.作为优选,所述支撑杆为伸缩杆,所述拉绳为钢丝绳,所述第一调节器和第二调节器均为调节螺栓。
14.作为优选,所述助力组件和手臂支撑组件均均设为两组,且均以脊椎为中线对称设于两侧。
15.与现有技术相比,本实用新型具有以下有益效果:
16.1、本实用新型利用拉簧作为储能元件为人体手臂提供恒定支撑力,不需要任何动力源,通过简单的机械结构实现对人体手臂提供恒定向上的支撑力,同时结构采用仿生学,本方案可满足人体手臂在任何范围内都能自由活动不产生束缚感且不影响助力效果,实现外骨骼灵活、舒适以及实用性;
17.2、本实用新型通过连杆一和滑动的连杆二组成可伸缩的连杆,再通过旋钮把手的固定可根据手臂大臂长度任意调节,保证使用过程中的舒适性和实用性,从而更好的对拉簧拉力进行传递。
18.3、本实用新型穿戴组件通过多组卡扣进行连接,可根据不同人体体型进行调节,满足不同身高体型穿戴,分别对使用者腰部、肩部及胸部进行贴合,并通过与支撑杆相连的底座在滑槽二上的滑动,使助力组件进一步贴合使用者,有利于稳定提供助力;
19.4、本实用新型第一调节器可调节拉簧初始拉力,第二调节器通过调节块在滑槽一的滑动调节拉簧端力臂距离,并通过助力刻度的设置,可以精准进行助力大小的调节,从而为对应手臂提供不同大小的助力。
附图说明
20.图1为本实用新型的穿戴示意图;
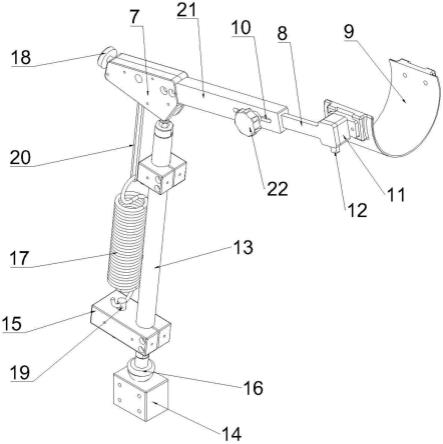
21.图2为本实用新型的结构示意图;
22.图3为本实用新型转接块内部结构示意图;
23.图4为本实用新型快装件爆炸示意图;
24.图5为本实用新型快装件与插销连接主视图;
25.图6为图5沿c-c剖视图;
26.图7为拉簧提供助力示意图。
具体实施方式
27.下面将结合图1-7详细说明本实用新型,在此本实用新型的示意性实施例以及说明用来解释本实用新型,但并不作为对本实用新型的限定。
28.一种穿戴式肩部助力外骨骼,其包括穿戴组件、均以脊椎为中线对称设于两侧的两组助力组件5和两组手臂支撑组件3,所述穿戴组件包含设有腰部固定板6的腰带2,所述助力组件包括拉簧17、拉绳20和支撑杆13,所述支撑杆一端通过球头关节16活动连接固定于腰部固定板上的底座14,所述支撑杆另一端与转接块支点26铰接,具体的支撑杆为可以调节高度的伸缩杆,所述拉簧的一端通过第一调节器19连接于支撑杆上的支座15,通过第一调节器可以调节拉簧初始拉力,拉簧远离支座的另一端通过拉绳连接于调节块25,本方案中的拉绳采用钢丝绳,所述调节块通过设于转接块7一端的第二调节器18的调节滑动于转接块内滑槽一24,所述滑槽一与转接块支点的连线和手臂支撑组件平移至转接块支点处与转接块支点的连线成夹角设置,夹角设计的目的是使手臂完全放下时,拉簧拉力力臂为0,且所述转接块上沿滑槽一方向设有助力刻度,第一调节器和第二调节器均为调节螺栓,本方案利用杠杆原理f1*l1=f2*l2,以支撑杆为轴,在无任何动力源的情况下利用拉簧作为储能元件为人体手臂提供恒定支撑力,转接块将助力组件产生的助力传递给另一端连接的手臂支撑组件,支撑手臂臂长固定,第二调节器通过调节块在滑槽一的滑动调节拉簧端力臂距离,并通过助力刻度的设置,可以精准进行助力大小的调节,从而为对应手臂提供不同大小的助力。
29.手臂支撑组件包括连杆一21、连杆二8和手臂箍套9,所述连杆一首端与转接块相连,所述连杆二滑动连接于连杆一上的滑槽二10并通过旋钮把手22进行固定,通过连杆二在连杆一上滑槽二内的滑动可以将两者组成一个伸缩连杆,再通过旋钮把手的固定可根据手臂大臂长度任意调节,保证使用过程中的舒适性和实用性,连杆二远离连杆一的一端通过快装件与手臂箍套相连,所述手臂箍套用于包裹使用者1的手臂4,手臂箍套是由塑制品、海绵垫等材料组合而成,外围再通过磁性卡扣将使用者的手臂包裹住,快装件包括卡座11和卡爪12,所述卡座底部设有用于卡爪滑动的凹槽29,所述凹槽内设有嵌入卡爪上卡槽一33的挡块30,所述卡槽一内还设有抵接挡块与卡爪一端的弹簧28,所述卡爪插入卡座的另一端与穿过卡座顶部的插销31上的卡槽二32契合相抵接,所述卡槽二沿插销的插入端圆周开设,且所述插销与卡座保持相对运动,所述卡爪的滑动方向与插销的插入方向相互垂直,在弹簧的作用下可使卡爪保持在初始位,也就是卡爪与挡块相抵接,通过手指按压可使卡爪在凹槽内滑动,松开即回到初始位,插销与卡座上均设有相互匹配的斜面便于导向插入衔接,当插销安装到位后,通过卡槽二卡紧卡爪,防止插销脱出,所述插销远离卡爪的一端与手臂箍套相连,为方便使用者穿戴设备,使用者先将手臂箍套固定在大臂上,再通过配套使用的插销和快装件与手臂支撑组件连接。
30.转接块包括拼接的两个镜像零件23,所述滑槽一设有两个,且两个滑槽一呈对称设置设于两个镜像零件相对一侧。
31.穿戴组件还包含有两个肩带27,所述肩带的首端和尾端分别连接于腰带的前部和后部,所述肩带和腰带上均设有至少一组卡扣,腰带后部设有供底座滑动的滑槽二,所述底座通过紧固件固定于滑槽二内,穿戴组件通过多组卡扣进行连接,可根据不同人体体型进行调节,满足不同身高体型穿戴,分别对使用者腰部、肩部及胸部进行贴合,并通过与支撑
杆相连的底座在滑槽二上的滑动,使助力组件进一步贴合使用者,有利于稳定提供助力。
32.人体手臂重量大概4kg左右,不同体型手臂重量会有所变化,设备利用杠杆原理f1*l1=f2*l2,以支撑杆为支点,一端安装在手臂上,另一端连接拉簧,拉簧所产生的拉力给手臂提供支撑力,由于手臂运动到不同位置所对应的力臂和拉簧的力臂都发生改变,当手臂自然下垂时,手臂与支撑杆夹角大概成20
°
夹角,通过结构设计,使得拉簧拉力和拉簧长度达到最大,但此时拉簧拉力方向与支撑杆轴线基本在同一条线,力臂为0,此时对手臂基本不产生支撑力,产生的效果就是当不需要工作的时候,手臂可自然放下,但随着手臂逐渐抬起,夹角逐渐增大,拉簧力臂和手臂力臂也随之增大,但手臂力臂增大速度远大于拉簧力臂,所以当手臂在下面摆动时,所需要的拉簧力比较大,随着夹角增大对手臂的助力也逐渐增大,但此时拉簧的形变不足以产生支撑手臂的力,所以手臂感受到的力比较小。当夹角达到40
°
,基本可以产生足够支撑手臂的支撑力,也就是说可以达到设定的支撑力,相当于手臂在20
°
至40
°
之间活动,产生的支撑力不足以支撑手臂的重量,所以感觉支撑力比较弱,因而基本不会产生束缚感,当夹角达到45
°
时,助力效果逐渐明显,当手臂在40
°
至170
°
时,虽然拉簧的拉力逐渐减小,但由于力臂随着变化,拉簧对手臂的支撑力基本恒定,整个过程中拉簧提供助力的大小如图7所示,其中x轴代表手臂与支撑杆夹角,y轴代表手臂支撑力。
33.在实施过程中,根据使用者体型的手臂长度,通过连杆二的滑动调节匹配的连杆一和连杆二的长度,并通过旋钮把手固定,接着通过手臂箍套固定于使用者的手臂,再利用第一调节器调节拉簧初始拉力,利用第二调节器带动调节块在滑槽一的滑动调节拉簧端力臂距离,并通过助力刻度的设置,可以精准进行助力大小的调节,从而设定支撑力,为对应手臂提供不同大小的助力,再穿戴好穿戴组件,并通过多组卡扣调整至贴合使用者的位置,最后通过底座在滑槽二的滑动,将与底座相连的助力组件固定在腰带后部腰部固定板匹配的位置,再根据工作者的需求抬升手臂支撑组件,从而利用拉簧作为储能元件为人体手臂提供恒定向上的支撑力。
34.以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理;同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1