一种全自动冲床装置的制作方法
1.本实用新型涉及一种全自动冲床装置,特别涉及一种与压铸装置搭配使用以达到全自动生产目的的全自动冲床装置。
背景技术:
2.冲床就是一台冲压式压力机。在国民生产中,冲压工艺由于比传统机械加工来说有节约材料和能源,效率高,对操作者技术要求不高及通过各种模具应用可以做出机械加工所无法达到的产品这些优点,因而它的用途越来越广泛。
3.冲压生产主要是针对板材的。通过模具,能做出落料,冲孔,成型,拉深,修整,精冲,整形,铆接及挤压件等等,广泛应用于各个领域。适用于各种塑料性材料或者铝铁锌等材料的压力成型加工,冲裁加工,材料的校直、弯曲、轴承的装配工艺。
4.因此,特别需要一种全自动冲床装置,以解决上述现有存在的问题。
技术实现要素:
5.本实用新型的目的在于提供一种全自动冲床装置,针对现有技术的不足,在人员日渐紧张的情况下减少人工操作,同时也会大幅度的减少出错率,加工速度快,加压平稳,可实现无级调速,操作简便。
6.本实用新型所解决的技术问题可以采用以下技术方案来实现:
7.一种全自动冲床装置,其特征在于,它包括冲床本体、取件装置和控制装置,所述取件装置和控制装置分别设置在所述冲床本体的两侧,所述控制装置通过电气连接分别与所述取件装置和所述冲床本体互相连接,所述冲床本体包括支座、驱动导柱、主驱动缸和顶料缸,所述驱动导柱分别垂直固定在所述支座的四端,所述驱动导柱的顶部从上至下依次设置有主驱动缸和顶料缸,在所述支座的顶部设置有工作台,所述工作台上设置有冲切模具。
8.在本实用新型的一个实施例中,所述冲切模具的上半部固定在所述顶料缸的底部,所述冲切模具的下半部固定在所述工作台的顶部。
9.在本实用新型的一个实施例中,所述顶料缸通过导柱套固定在所述驱动导柱上。
10.在本实用新型的一个实施例中,所述驱动导柱的侧面设置有位移限位传感器,所述位移限位传感器通过电气连接与所述控制装置相连接。
11.在本实用新型的一个实施例中,所述控制装置包括plc控制器和人机界面,所述人机界面与所述plc控制器相连接,所述plc控制器的控制端分别与主驱动缸、顶料缸和位移限位传感器相连接。
12.在本实用新型的一个实施例中,在所述冲床本体的工作区域的两侧分别设置有对照式光电感应器,所述光电感应器与所述控制装置的plc控制器的控制端相连接,所述光电感应器的保护高度为600mm。
13.在本实用新型的一个实施例中,在所述支座上设置有双手压制按钮,所述双手压
制按钮与所述控制装置的plc控制器的控制端相连接。
14.在本实用新型的一个实施例中,所述取件装置包括接料滑板和取件支架,所述接料滑板的底部设置有滑动驱动机构,所述接料滑板与所述取件支架之间通过旋转驱动机构互相连接固定,所述滑动驱动机构的控制端与所述控制装置的plc控制器的控制端相连接,所述旋转驱动机构的控制端与所述控制装置的plc控制器的控制端相连接。
15.本实用新型的全自动冲床装置,与现有技术相比,通过冲床本体完成冲切模具的成型加工,取件装置在成型加工完成之后,伸入冲床本体进行取件,整个过程由控制装置控制,达到全自动生产的目的,在人员日渐紧张的情况下,减少人工操作,同时也会大幅度的减少出错率,加工速度快,加压平稳,可实现无级调速,操作简便,实现本实用新型的目的。
16.本实用新型的特点可参阅本案图式及以下较好实施方式的详细说明而获得清楚地了解。
附图说明
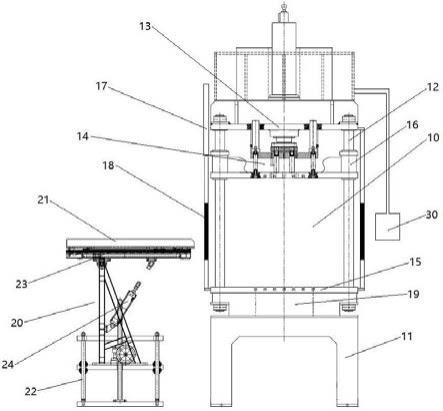
17.图1为本实用新型的全自动冲床装置的结构示意图。
具体实施方式
18.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本实用新型。
实施例
19.如图1所示,本实用新型的全自动冲床装置,它包括冲床本体10、取件装置20和控制装置30,取件装置20和控制装置30分别设置在冲床本体10的两侧,控制装置30通过电气连接分别与取件装置20和冲床本体10互相连接,冲床本体10包括支座11、驱动导柱12、主驱动缸13和顶料缸14,驱动导柱12分别垂直固定在支座11的四端,驱动导柱12的顶部从上至下依次设置有主驱动缸13和顶料缸14,在支座11的顶部设置有工作台15,工作台15上设置有冲切模具(图中未示)。
20.在本实施例中,冲切模具(图中未示)的上半部固定在顶料缸14的底部,冲切模具(图中未示)的下半部固定在工作台15的顶部。
21.在本实施例中,顶料缸14通过导柱套16固定在驱动导柱12上。
22.在本实施例中,主驱动缸13和顶料缸14为油缸或气缸。
23.在本实施例中,驱动导柱12的侧面设置有位移限位传感器17,位移限位传感器17通过电气连接与控制装置30相连接。
24.在本实施例中,控制装置30包括plc控制器和人机界面,所述人机界面与所述plc控制器相连接,所述plc控制器的控制端分别与主驱动缸13、顶料缸14和位移限位传感器17相连接。
25.在本实施例中,在冲床本体10的工作区域的两侧分别设置有对照式光电感应器18,光电感应器18与控制装置30的plc控制器的控制端相连接,光电感应器18的保护高度为600mm。
26.在本实施例中,在支座11上设置有双手压制按钮19,双手压制按钮19与控制装置
30的plc控制器的控制端相连接。
27.在本实施例中,取件装置20包括接料滑板21和取件支架22,接料滑板21的底部设置有滑动驱动机构23,接料滑板21与取件支架22之间通过旋转驱动机构24互相连接固定,滑动驱动机构23的控制端与控制装置30的plc控制器的控制端相连接,旋转驱动机构24的控制端与控制装置30的plc控制器的控制端相连接。
28.在本实施例中,滑动驱动机构23为一滑轨驱动机构,旋转驱动机构24为一气缸旋转驱动机构。
29.本实用新型的全自动冲床装置的工作流程如下:
30.1、将冲切模具装至工作台15上,通过控制装置30的人机界面调整参数后按双手压制按钮19,开始工作;
31.2、支座11使冲床本体10固定不动,主驱动缸13沿着驱动导柱12快速向下,顶料缸14通过导柱套16沿着驱动导柱12快速向下,准备开始冲切;
32.3、主驱动缸13向下接近位置时,位移限位传感器17向控制装置30发送信号;
33.4、主驱动缸13缓慢向下,位移限位传感器17控制主驱动缸13到什么位置开始冲切,冲切要多深,冲切完成后主驱动缸13回程到什么位置;
34.5、冲切产品后,位移限位传感器17向控制装置30发送信号,保证冲切模具不会过度冲切;
35.6、主驱动缸13和顶料缸14进行保压延时;
36.7、主驱动缸13泄压,回程碰到位移限位传感器17向控制装置30发送信号后到上限原点位置;
37.8、冲切完成后的产品会留在冲切模具(图中未示)的上半部上,接料滑板21通过滑动驱动机构23伸入冲床本体10的工作区域进行接料;
38.9、顶料缸14将冲切完成后的产品,退回;
39.10、冲切完成后的产品落至接料滑板21上,然后接料滑板21通过滑动驱动机构23退出冲床本体10的工作区域;
40.11、旋转驱动机构24控制接料滑板21倾斜30度将冲切完成后的产品滑出接料滑板21,拾取产品,完成整个过程。
41.本实用新型的全自动冲床装置采用双手压制按钮19,只有当两个按钮同时按下0.3s设备才可以工作;操作者正面作业区域的两侧安装对照式光电感应器18,保护高度600mm,能在作业者肢体误入设备作业空间时,停止前动作以防人体伤害。
42.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内,本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1