电芯焊接生产线的制作方法
[0001]
本实用新型涉及锂电池生产设备,具体地说是一种电芯焊接生产线。
背景技术:
[0002]
生产锂电池时,先将多个圆柱形电芯组装成电芯模组,然后在电芯模组上焊接载流片。在此过程中需要使用焊接治具来辅助焊接,焊接治具包括上盖与下盖。焊接载流片前,先将电芯装入下盖(行业内称之为入壳),然后再将上盖组装到电芯上(行业内称之为合盖),使电芯与焊接治具组成一个整体。由于电芯模组上有两个相对面上都需要焊接载流片,因此,在焊接完一面的载流片后,需要将焊接治具翻转后焊接电芯模组另一面的载流片。在两面的载流片都焊接结束后,再将焊接治具拆解开。
[0003]
现有技术中,焊接治具的合盖与拆解以及翻转通常采用人工,不利于自动化生产,效率较低。
技术实现要素:
[0004]
本实用新型针对现有的电芯焊接效率低的问题,提供一种高效的电芯焊接生产线。
[0005]
本实用新型中的电芯焊接生产线的技术方案如下:一种电芯焊接生产线,包括输送线、入壳装置、治具合盖装置、第一焊接装置、治具翻转装置、第二焊接装置和治具开盖装置,输送线将电芯分别输送至入壳工位、合盖工位、第一焊接工位、翻转工位、第二焊接工位和开盖工位;其中:入壳装置在入壳工位将电芯组装在具有第一载流片的治具下盖中,第一载流片与电芯的第一端部对应;治具合盖装置被配置为在合盖工位将具有第二载流片的治具上盖装配在治具下盖上,第二载流片与电芯的第二端部对应,第一载流片、电芯和第二载流片形成待焊接的电芯模组;第一焊接装置在第一焊接工位将电芯模组中的第二载流片焊接至电芯的第二端部;治具翻转装置被配置为在翻转工位翻转电芯模组;第二焊接装置在第二焊接工位将电芯模组中的第一载流片焊接至电芯的第一端部;治具开盖装置在开盖工位将治具上盖从治具下盖分离,以使治具上盖被循环使用。
[0006]
通过输送线输送工件,通过治具合盖装置来实现焊接治具的组装,通过治具翻转装置来翻转焊接治具,通过焊接装置来焊接电芯模组的载流片,通过治具开盖装置来实现焊接治具的拆卸,从而实现电芯模组的自动化叠装与焊接载流片,提高了电芯焊接的生产效率。
[0007]
进一步地,治具合盖装置与治具开盖装置分别包括第一顶升机构、夹爪机构及第一升降机构;第一顶升机构被配置为将从上道工位传送来的带有电芯的下盖托起并固定,下盖内叠放有电芯;夹爪机构安装在第一升降机构上,并且位于第一顶升机构的上方;夹爪机构被配置为夹取上盖;第一升降机构安装于第一顶升机构的一侧,用于带动夹爪机构接近第一顶升机构并将上盖装配在下盖上,或者带动夹爪机构远离第一顶升机构并将上盖从下盖上拆下。
[0008]
治具合盖装置和治具开盖装置通过第一顶升机构托起并固定下盖,通过夹爪机构夹持上盖,通过第一升降机构带动夹爪机构朝向第一顶升机构移动来合盖,通过第一升降机构带动夹爪机构远离顶升机构移动来开盖,从而实现焊接治具的开合,提高了开合盖的效率。
[0009]
进一步地,夹爪机构包括第一安装基板、夹板及夹板驱动器,两个夹板驱动器相对安装在第一安装基板上,每个夹板驱动器的活动部件上分别安装有一个夹板;两个夹板相对布置,在各自的夹板驱动器的带动下靠近或者远离;夹爪机构还包括第一旋转机构,第一安装基板安装在第一旋转机构的活动部件上,第一旋转机构带动第一安装基板及夹板旋转。
[0010]
夹爪机构采用两个夹板驱动器带动两个夹板来夹紧上盖,动作可靠,结构简单;夹爪机构采用第一旋转机构,可将方向不对的上盖翻转后使用,增加了夹爪机构的适应性。
[0011]
进一步地,夹爪机构还包括第一锁紧机构,第一锁紧机构包括第一锁紧板、第一锁紧块及第一锁紧板驱动器;第一锁紧板上设置有凸起,第一锁紧块上开有与凸起相对应的凹槽,第一锁紧板驱动器带动锁紧板移动直至卡合在第一锁紧块上;第一锁紧板驱动器安装在第一安装基板上,第一锁紧板安装在第一锁紧板驱动器的活动部件上,第一锁紧块安装在夹板上;或者,第一锁紧板驱动器安装在夹板上,第一锁紧板安装在第一锁紧板驱动器的活动部件上,第一锁紧块安装在第一安装基板上。
[0012]
夹爪机构设置第一锁紧机构,在夹住上盖后,通过第一锁紧机构固定住夹板的位置,可防止夹板活动导致上盖掉落。
[0013]
进一步地,治具翻转装置包括第二顶升机构、翻转机构及第二升降机构;第二顶升机构被配置为将从上道工位传送来的带有电芯模组的焊接治具托起并固定;翻转机构安装在升降机构上,并且位于第二顶升机构的上方;翻转机构被配置为夹取焊接治具并将其翻转;第二升降机构安装于第二顶升机构的上方,用于带动翻转机构接近或者远离第二顶升机构。
[0014]
通过第二顶升机构托起并固定焊接治具,通过第二升降机构带动翻转机构靠近或者远离第二顶升机构来给翻转动作提供必要的空间,通过翻转机构夹持并翻转焊接治具,提高了翻转动作的效率。
[0015]
进一步地,翻转机构包括第二安装基板、夹板组件驱动器、第二旋转机构及夹板组件,两个夹板组件驱动器相对安装在第二安装基板上,每个夹板组件驱动器的活动部件上分别安装有一个第二旋转机构,每个第二旋转机构上分别安装有一个夹板组件;两个夹板组件相对布置,在各自的第二旋转机构的驱动下翻转,在各自的夹板组件驱动器的带动下靠近或者远离。
[0016]
翻转机构采用两个夹板组件驱动器带动两个夹板组件靠近或者远离,通过各自的旋转机构来翻转焊接治具,实现焊接治具的翻转,动作可靠,结构简单。
[0017]
进一步地,第二旋转机构包括夹板基座、相互啮合的齿轮、齿条以及齿条驱动器,齿轮及齿条驱动器分别安装在夹板基座上,夹板组件安装在齿轮的旋转轴上,齿条安装在齿条驱动器的活动部件上,齿条驱动器驱动齿条做直线运动,齿条带动齿轮旋转,齿轮带动夹板组件旋转并实现翻转。
[0018]
第二旋转机构采用齿轮与齿条相啮合的结构,占用空间小。
[0019]
进一步地,翻转机构还包括第二锁紧机构,第二锁紧机构包括第二锁紧板、锁紧凹槽及第二锁紧板驱动器;第二锁紧板驱动器安装在第二安装基板上,锁紧凹槽设置在夹板基座上,第二锁紧板驱动器带动第二锁紧板移动直至卡合在锁紧凹槽内。
[0020]
翻转机构上设置第二锁紧机构,在夹住焊接治具后,通过第二锁紧机构固定住夹板组件的位置,可防止夹板组件活动导致焊接治具掉落。
[0021]
进一步地,第一焊接装置与第二焊接装置分别包括第三顶升机构、焊接组件及固定组件;第三顶升机构被配置为将从上道工位传送来的带有电芯模组的焊接治具托起;固定组件安装于第三顶升机构的上方,被配置为将焊接治具固定;焊接组件安装于固定组件的上方,被配置为焊接电芯模组的载流片。
[0022]
焊接装置通过第三顶升机构托起焊接治具,通过固定组件固定焊接治具,通过焊接组件施焊,提高了焊接效率。
[0023]
进一步地,固定组件包括两套相对布置的夹板及夹板驱动器,两个夹板在各自的夹板驱动器的带动下相对靠近或者远离,从而夹紧或者松开焊接治具;固定组件还包括压紧组件,每个夹板上分别安装有一个压紧组件,每个压紧组件包括旋转气缸及安装在旋转气缸活动部件上的压板,旋转气缸带动压板旋转及下压,从而压住焊接治具。
[0024]
固定组件采用夹板驱动器来驱动夹板,结构简单,固定可靠;固定组件设置压紧组件,可进一步固定焊接治具,防止焊接治具活动,提高焊接质量。
[0025]
进一步地,电芯焊接生产线还包括第一检测机构和第二检测机构,第一检测机构和第二检测机构分别对第一焊接装置和第二焊接装置焊接后的电芯模组进行检测。
[0026]
通过检测机构检测电芯模组上的载流片焊接是否合格,可防止不合格品进入下道工序。
[0027]
进一步地,电芯焊接生产线还包括下料装置,下料装置被配置为将焊接完成的电芯模组搬离治具下盖,以使治具下盖被循环使用。
[0028]
通过下料装置使治具下盖循环使用,进一步提高了生产线的自动化程度与生产效率。
附图说明
[0029]
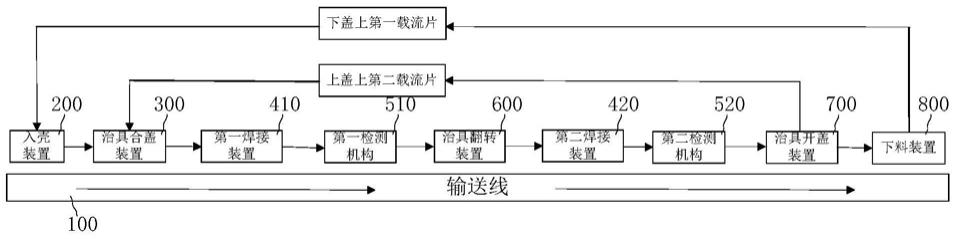
图1为本实用新型一种实施例的结构流程框图。
[0030]
图2为本实用新型中的治具合盖装置与治具开盖装置一种实施例的立体结构示意图。
[0031]
图3为图2的俯视图。
[0032]
图4为图2的左视图。
[0033]
图5为图2中的第一顶升机构的立体结构示意图。
[0034]
图6为图2中的夹爪机构的立体结构示意图。
[0035]
图7为图2中的夹爪机构去除第一旋转机构后的另一视角的立体结构示意图。
[0036]
图8为图6、图7中的第一锁紧机构的立体放大示意图。
[0037]
图9为本实用新型中的治具翻转装置一种实施例的立体结构示意图。
[0038]
图10为图9的主视图。
[0039]
图11为图9中去掉安装支架与焊接治具后的主视图。
[0040]
图12为图11的左视图。
[0041]
图13为图9中的锁紧机构与旋转机构的局部放大图。
[0042]
图14为图9中的夹板组件的立体放大示意图。
[0043]
图15为本实用新型中的第一焊接装置和第二焊接装置一种实施例的立体结构示意图。
[0044]
图16为图15的主视图。
[0045]
图17为图16的俯视图。
[0046]
图18为图15中的固定组件的立体放大示意图。
[0047]
图1~图18中,包括:
[0048]
输送线100、入壳装置200、治具合盖装置300、第一焊接装置410、治具翻转装置600、第二焊接装置420、治具开盖装置700、第一检测机构510、第二检测机构520、下料装置800;
[0049]
第一顶升机构10、第一顶板11、第一顶升驱动器12、第一夹紧组件13、第一夹紧板131、第一夹紧板驱动器132、夹爪机构20、第一安装基板21、第一夹板22、定位销221、夹板驱动器23、第一锁紧机构24、第一锁紧板241、第一锁紧块242、第一锁紧板驱动器243、凸起244、凹槽245、第一导向机构25、导轨251、滑套252、第一旋转机构26、第一升降机构30、滑轨31、升降推动器32;
[0050]
第二顶升机构40、第二顶板41、第二顶升驱动器42、第二夹紧组件43、第二夹紧板431、第二夹紧板驱动器432、翻转机构50、第二安装基板51、夹板组件52、第二夹板521、固定气缸522、夹板组件驱动器53、第二锁紧机构54、第二锁紧板541、第二锁紧板驱动器543、锁紧凹槽545、第二导向机构55、导轨551、滑套552、第二旋转机构56、夹板基座561、齿轮562、齿条563、齿条驱动器564、第二升降机构60、推动器座板61、升降推动器62、导柱组件63;
[0051]
第三顶升机构70、焊接组件80、固定组件90、第三夹板91、夹板驱动器92、压紧组件93、旋转气缸931、压板932;
[0052]
焊接治具1000。
具体实施方式
[0053]
为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
[0054]
本实用新型是一种电芯焊接生产线,用于将电芯叠装成电芯模组,并且在电芯模组的两端分别焊接上载流片。在焊接生产线运转时,需要使用焊接治具来辅助焊接。焊接治具用于承载待焊接载流片的电芯模组,焊接治具包括上盖与下盖。
[0055]
图1所示是电芯焊接生产线的一种可选的实施例,图1是该生产线的流程框图。
[0056]
如图1所示,该电芯焊接生产线至少包括输送线100、入壳装置200、治具合盖装置300、第一焊接装置410、治具翻转装置600、第二焊接装置420和治具开盖装置700,输送线100将电芯分别输送至入壳工位、合盖工位、第一焊接工位、翻转工位、第二焊接工位和开盖工位。该电芯焊接生产线还可以包括第一检测机构510、第二检测机构520及下料装置800。
[0057]
其中:入壳装置200在入壳工位将电芯组装在具有第一载流片的治具下盖中,第一载流片与电芯的第一端部对应;治具合盖装置300被配置为在合盖工位将具有第二载流片
的治具上盖装配在治具下盖上,第二载流片与电芯的第二端部对应,第一载流片、电芯和第二载流片形成待焊接的电芯模组;第一焊接装置410在第一焊接工位将电芯模组中的第二载流片焊接至电芯的第二端部;治具翻转装置600被配置为在翻转工位翻转电芯模组;第二焊接装置420在第二焊接工位将电芯模组中的第一载流片焊接至电芯的第一端部;治具开盖装置700在开盖工位将治具上盖从治具下盖分离,以使治具上盖被循环使用。从治具开盖装置700中分离出的治具上盖,装上第二载流片后,被送到治具合盖装置300循环使用,治具上盖设置有磁铁,用于固定载流片,防止治具上盖旋转时载流片掉落。
[0058]
通过输送线100输送工件,通过治具合盖装置300来实现焊接治具的组装,通过治具翻转装置600来翻转焊接治具,通过焊接装置来焊接电芯模组的载流片,通过治具开盖装置700来实现焊接治具的拆卸,从而实现电芯模组的自动化叠装与焊接载流片,提高了电芯焊接的生产效率。
[0059]
下面对该电芯焊接生产线的各个部分进行详细的说明。
[0060]
输送线100与入壳装置200可以采用现有技术中的任意一种结构,在此不再赘述。
[0061]
治具合盖装置300与治具开盖装置700可以采用同一种结构。
[0062]
图2~图4所示是治具合盖装置300与治具开盖装置700的一种可选的实施例,图2是该装置的立体图,图3是该装置的主视图,图4是该装置的左视图。
[0063]
如图2~图4所示,治具合盖装置300与治具开盖装置700分别包括第一顶升机构10、夹爪机构20及第一升降机构30。其中:第一顶升机构10被配置为将从上道工位传送来的带有电芯的下盖托起并固定,下盖内叠放有电芯;夹爪机构20安装在第一升降机构30上,并且位于第一顶升机构10的上方;夹爪机构20被配置为夹取上盖;第一升降机构30安装于第一顶升机构10的一侧,用于带动夹爪机构20接近第一顶升机构10并将上盖装配在下盖上,或者带动夹爪机构20远离第一顶升机构10并将上盖从下盖上拆下。
[0064]
治具合盖装置300和治具开盖装置700通过第一顶升机构10托起并固定下盖,通过夹爪机构20夹持上盖,通过第一升降机构30带动夹爪机构20朝向第一顶升机构10移动来合盖,通过第一升降机构30带动夹爪机构20远离第一顶升机构10移动来开盖,从而实现焊接治具的开合,提高了开合盖的效率。
[0065]
图5所示是第一顶升机构10的一种可选的实施例,图5是该机构的立体图。
[0066]
该第一顶升机构10包括第一顶板11、第一顶升驱动器12及第一夹紧组件13。第一顶板11安装在第一顶升驱动器12的活动部件上,第一夹紧组件13安装在第一顶板11的相对的两侧。
[0067]
第一顶升机构10通过第一夹紧组件13将下盖固定在第一顶板11上,可防止下盖移动,保证开合盖动作的精确性。
[0068]
可选地,第一夹紧组件13包括第一夹紧板131及第一夹紧板驱动器132,第一夹紧板131安装在第一夹紧板驱动器132的活动部件上,两个第一夹紧板驱动器132带动各自的第一夹紧板131相向移动固定下盖,两个第一夹紧板驱动器132带动各自的第一夹紧板131相背移动松开下盖。
[0069]
第一夹紧组件13采用第一夹紧板131与第一夹紧板驱动器132,结构简单,成本低。
[0070]
可选地,第一顶升驱动器12与第一夹紧板驱动器132分别采用气缸。
[0071]
图6~图7所示是夹爪机构20的一种可选的实施例,图6是该机构的立体图,图7是
去除旋转机构后的另一视角的立体图。
[0072]
如图6、图7所示,该夹爪机构20包括第一安装基板21、第一夹板22及夹板驱动器23。两个夹板驱动器23相对安装在第一安装基板21上,每个夹板驱动器23的活动部件上分别安装有一个第一夹板22;两个第一夹板22相对布置,在各自的夹板驱动器23的带动下靠近或者远离。可选地,夹板驱动器23采用气缸。
[0073]
夹爪机构20采用两个夹板驱动器23带动两个第一夹板22来夹紧上盖,动作可靠,结构简单。
[0074]
可选地,第一夹板22上安装有定位销221,焊接治具上开有与定位销221相配合的定位孔。焊接治具通过定位销221在夹爪机构20上定位,可确保焊接治具相对于夹爪机构20的相对位置。
[0075]
可选地,夹爪机构20还包括第一锁紧机构24,第一锁紧机构24包括第一锁紧板241、第一锁紧块242及第一锁紧板驱动器243。如图8所示,第一锁紧板241上设置有凸起244,第一锁紧块242上开有与凸起244相对应的凹槽245。第一锁紧板驱动器243带动第一锁紧板241移动直至卡合在第一锁紧块242上。可选地,第一锁紧板驱动器243采用气缸。
[0076]
夹爪机构20上设置第一锁紧机构24,在夹住上盖后,通过第一锁紧机构24固定住第一夹板22的位置,可防止第一夹板22活动导致上盖掉落。
[0077]
第一锁紧机构24有两种安装方式:第一种,第一锁紧板驱动器243安装在第一安装基板21上,第一锁紧板241安装在第一锁紧板驱动器243的活动部件上,第一锁紧块242安装在第一夹板22上;或者,第二种,第一锁紧板驱动器243安装在第一夹板22上,第一锁紧板241安装在第一锁紧板驱动器243的活动部件上,第一锁紧块242安装在第一安装基板21上。
[0078]
第一锁紧板驱动器243安装在第一安装基板21上,第一锁紧块242安装在第一夹板22上,可以可靠地固定,不会产生晃动;第一锁紧板驱动器243安装在第一夹板22上,可以减小第一安装基板21的长度,节约空间。
[0079]
可选地,夹爪机构20还包括第一导向机构25,第一导向机构25包括导轨251及滑套252,导轨251安装在安装基板21上,两个滑套252分别安装在两个第一夹板22上,两个滑套252分别滑动配合在导轨251上。
[0080]
夹爪机构20采用第一导向机构25,可对第一夹板22的移动起导向作用,使第一夹板22移动更平稳。
[0081]
可选地,夹爪机构20还包括第一旋转机构26,第一安装基板21安装在第一旋转机构26的活动部件上,第一旋转机构26带动第一安装基板21及第一夹板22旋转。
[0082]
夹爪机构20采用第一旋转机构26,可将方向不对的上盖翻转后使用,增加了夹爪机构20的适应性。
[0083]
第一旋转机构26可以采用现有技术中的任意一种结构,常用的,第一旋转机构26采用电机与减速器相结合的形式,将夹爪机构20的第一安装安装基板21安装在减速器的输出轴上。电机带动减速器运转,并进而带动第一安装基板21旋转。
[0084]
再参见图2~图4,可选地,第一升降机构30包括滑轨31及升降推动器32,夹爪机构20滑动安装在滑轨31上,升降推动器32带动夹爪机构20沿着滑轨31移动。可选地,升降推动器32采用气缸。
[0085]
第一升降机构30采用滑轨31与升降推动器32,结构简单,动作平稳,不会产生晃
动。
[0086]
图9~图12所示是治具翻转装置600的一种可选的实施例,图9是该装置的立体图,图10是该装置的主视图,图11是该装置去掉安装支架与焊接治具后的主视图,图12是该装置去掉安装支架与焊接治具后的左视图。
[0087]
如图9~图12所示,该治具翻转装置600,包括第二顶升机构40、翻转机构50及第二升降机构60,这三个机构安装在安装支架上。其中:第二顶升机构40被配置为将从上道工位传送来的带有电芯模组的焊接治具1000托起并固定;翻转机构50安装在第二升降机构60上,并且位于第二顶升机构40的上方;翻转机构50被配置为夹取焊接治具1000并将其翻转;第二升降机构60安装于第二顶升机构40的上方,用于带动翻转机构50接近或者远离第二顶升机构40。
[0088]
通过第二顶升机构40托起并固定焊接治具1000,通过第二升降机构60带动翻转机构50靠近或者远离第二顶升机构40来给翻转动作提供必要的空间,通过翻转机构50夹持并翻转焊接治具1000,提高了翻转动作的效率。
[0089]
第二顶升机构40的一种可选实施例,包括第二顶板41、第二顶升驱动器42及第二夹紧组件43;第二顶板41安装在第二顶升驱动器42的活动部件上,第二夹紧组件43安装在第二顶板41的一侧。可选地,第二顶升驱动器42采用气缸。
[0090]
第二顶升机构40通过第二夹紧组件43将焊接治具1000固定在第二顶板41上,可防止焊接治具1000移动,保证翻转动作的精确性。
[0091]
可选地,第二夹紧组件43包括第二夹紧板431及第二夹紧板驱动器432,第二夹紧板431安装在第二夹紧板驱动器432的活动部件上,第二夹紧板驱动器432带动第二夹紧板431动作压紧电芯模组。可选地,第二夹紧板驱动器432采用气缸。
[0092]
第二夹紧组件43采用第二夹紧板431与第二夹紧板驱动器432,结构简单,成本低。
[0093]
翻转机构50的一种可选实施例,包括第二安装基板51、夹板组件驱动器53、第二旋转机构56及夹板组件52,两个夹板组件驱动器53相对安装在第二安装基板51上,每个夹板组件驱动器53的活动部件上分别安装有一个第二旋转机构56,每个第二旋转机构56上分别安装有一个夹板组件52;两个夹板组件52相对布置,在各自的第二旋转机构56的驱动下翻转,在各自的夹板组件驱动器53的带动下靠近或者远离。可选地,夹板组件驱动器53采用气缸。
[0094]
翻转机构50采用两个夹板组件驱动器53带动两个夹板组件52靠近或者远离,通过各自的第二旋转机构56来翻转焊接治具1000,实现焊接治具1000的翻转,动作可靠,结构简单。
[0095]
图13所示是第二旋转机构56的一种可选的实施例,该第二旋转机构56包括夹板基座561、相互啮合的齿轮562、齿条563以及齿条驱动器564,齿轮562及齿条驱动器564分别安装在夹板基座561上,夹板组件52安装在齿轮562的旋转轴上,齿条563安装在齿条驱动器564的活动部件上,齿条驱动器564驱动齿条563做直线运动,齿条563带动齿轮562旋转,齿轮562带动夹板组件52旋转并实现翻转。可选地,齿条驱动器564采用气缸。
[0096]
第二旋转机构56采用齿轮562与齿条563相啮合的结构,占用空间小。
[0097]
可选地,翻转机构50还包括第二锁紧机构54。如图5所示,第二锁紧机构54包括第二锁紧板541、锁紧凹槽545及第二锁紧板驱动器543;第二锁紧板驱动器543安装在第二安
装基板51上,锁紧凹槽545设置在夹板基座561上,第二锁紧板驱动器543带动第二锁紧板541移动直至卡合在锁紧凹槽545内。可选地,第二锁紧板驱动器543采用气缸。
[0098]
翻转机构50上设置第二锁紧机构54,在夹住焊接治具1000后,通过第二锁紧机构54固定住夹板组件52的位置,可防止夹板组件52活动导致焊接治具1000掉落。
[0099]
参见图9~图12,可选地,翻转机构50还包括第二导向机构55,第二导向机构55包括导轨551及滑套552,导轨551安装在第二安装基板51上,两个滑套552分别安装在两个夹板基座561上,两个滑套552分别滑动配合在导轨551上。
[0100]
翻转机构50采用第二导向机构55,可对夹板组件52的移动起导向作用,使夹板组件52移动更平稳。
[0101]
图14所示是夹板组件52的一种可选实施例,该夹板组件52包括第二夹板521及安装在第二夹板521上的至少两对固定气缸522,固定气缸522用于固定焊接治具1000。
[0102]
夹板组件52采用固定气缸522来固定焊接治具1000,结构简单,固定可靠。
[0103]
再参见图9~图12,可选地,第二升降机构60包括升降推动器62及推动器座板61,升降推动器62固定安装推动器座板61上,翻转机构50固定安装在升降推动器62的活动部件上,升降推动器62带动翻转机构50升降。可选地,升降推动器62采用气缸。
[0104]
第二升降机构60采用升降推动器62,结构简单,成本低。
[0105]
可选地,第二升降机构60还包括导柱组件63,导柱组件63的固定部件安装在推动器座板61上,导柱组件63的活动部件连接在翻转机构50上。
[0106]
第二升降机构60通过导柱组件63导向,使升降动作平稳,不会产生晃动。
[0107]
参见图1,第一焊接装置410与第二焊接装置420可以采用同一种结构。
[0108]
图15~图17所示是第一焊接装置410与第二焊接装置420的一种可选的实施例,图15是该装置的立体图,图16是该装置的主视图,图17是该装置的俯视图。
[0109]
如图15~图17所示,第一焊接装置410与第二焊接装置420分别包括第三顶升机构70、焊接组件80及固定组件90;第三顶升机构70被配置为将从上道工位传送来的带有电芯模组的焊接治具托起;固定组件90安装于第三顶升机构70的上方,被配置为将焊接治具固定;焊接组件80安装于固定组件90的上方,被配置为焊接电芯模组的载流片。
[0110]
焊接装置通过第三顶升机构70托起焊接治具,通过固定组件90固定焊接治具,通过焊接组件80施焊,提高了焊接效率。
[0111]
第三顶升机构70可以采用现有技术中的任意一种结构,在此不再赘述。
[0112]
可选地,焊接组件80包括焊枪及焊枪移动机构,焊枪安装在焊枪移动机构上,焊枪移动机构带动焊枪在三维空间移动位置。
[0113]
如图18所示,可选地,固定组件90包括两套相对布置的第三夹板91及夹板驱动器92,两个第三夹板91在各自的夹板驱动器92的带动下相对靠近或者远离,从而夹紧或者松开焊接治具;固定组件90还包括压紧组件93,每个第三夹板91上分别安装有一个压紧组件93,每个压紧组件93包括旋转气缸931及安装在旋转气缸931活动部件上的压板932,旋转气缸931带动压板932旋转及下压,从而压住焊接治具。
[0114]
固定组件90采用夹板驱动器92来驱动第三夹板91,结构简单,固定可靠;固定组件90设置压紧组件93,可可选固定焊接治具,防止焊接治具活动,提高焊接质量。
[0115]
参见图1,可选地,电芯焊接生产线还包括第一检测机构510和第二检测机构520,
第一检测机构510和第二检测机构520分别对第一焊接装置410和第二焊接装置420焊接后的电芯模组进行检测。
[0116]
通过检测机构检测电芯模组上的载流片焊接是否合格,可防止不合格品进入下道工序。
[0117]
第一检测机构510和第二检测机构520可以采用现有技术中的任意一种结构。
[0118]
可选地,电芯焊接生产线还包括下料装置800,下料装置800被配置为将焊接完成的电芯模组搬离治具下盖,以使治具下盖被循环使用。治具下盖装上第一载流片后,被送到入壳装置200循环使用。
[0119]
通过下料装置800使治具下盖循环使用,进一步提高了生产线的自动化程度与生产效率。
[0120]
下料装置800可以采用现有技术中的任意一种结构。
[0121]
上文对本实用新型进行了足够详细的具有一定特殊性的描述。所属领域内的普通技术人员应该理解,实施例中的描述仅仅是示例性的,在不偏离本实用新型的真实精神和范围的前提下做出所有改变都应该属于本实用新型的保护范围。本实用新型所要求保护的范围是由所述的权利要求书进行限定的,而不是由实施例中的上述描述来限定的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1