一种自动卷料焊接机的制作方法
[0001]
本实用新型属于自动焊接设备技术领域,具体来说,涉及的是一种自动卷料焊接机。
背景技术:
[0002]
片材的弯卷是制作大口径管材或者是圆筒器具的核心步骤,而这类片材的卷曲与一般的弯管或者是卷曲装置不同,一般的弯管设备是针对小口径管材,因此采用的是外模挤压的方式成型,适用于大批量生产统一规格的口径,而一般的卷曲装置虽然可以处理较大口径的卷材制作,诸如制作水壶类,但这类设备主要针对需要一定锥度的卷制工艺,大批量生产的时候也需要制造独立的模具,属于内模挤压工艺。
[0003]
上述两种类型的设备在其各自的领域能够得心应手,但是却因工艺特点而无法相互兼容,因此如果厂家需要兼顾2种卷料工艺的话则2种类型的设备均需要进行购置,不但如此,还需要针对不同的批次的产品单独制作对应的外模腔或者内模芯,进一步增加了生产成本,因此需要一种可以兼顾上述两种设备的特点、并且具备大批量生产各种口径不同锥度卷材能力的设备,降低生产成本,提高产能以及利润率。
技术实现要素:
[0004]
针对背景技术中存在的技术缺陷,本实用新型提出一种自动卷料焊接机,解决了上述技术问题以及满足了实际需求,具体的技术方案如下所示:
[0005]
一种自动卷料焊接机,包括机架、卷料机构以及焊接机构,所述卷料机构包括设于机架上成对的升降支撑托架,设于所述升降支撑托架水平对称中线两端、相互独立、成对的初级弯折夹臂,设于所述升降支撑托架上方成对的找平顶板与压平机构,设于所述找平顶板与升降支撑托架之间、与所述升降支撑托架布局方向一致、成对的次级弯折夹块,所述初级弯折夹臂整体与所述升降支撑托架的运动方向一致,所述次级弯折夹块连接在水平放置于所述机架上方的旋转伺服电机的输出端,且该次级弯折夹块之间还设有与机架相对静止的夹紧垫块,所述焊接机构连接有沿所述夹紧垫块长度方向活动的移动焊接平台,且该焊接机构的输出端正对于所述夹紧垫块的正上方。
[0006]
作为本实用新型进一步的技术方案,还包括与所述机架固定连接且输出端竖直向上的第一伺服气缸,所述第一伺服气缸的输出端连接有升降平台,所述升降平台的端部连接有相互平行且活动穿设于机架端面的导向杆,所述升降支撑托架设于所述升降平台的端面。
[0007]
作为本实用新型进一步的技术方案,所述初级弯折夹臂包括与所述机架固定连接的夹持轨道,设于所述夹持轨道一侧的导向丝杠,与所述夹持轨道和导向丝杠活动连接的调节平台,与所述导向丝杠的一端固定连接的丝杠电机以及活动连接于所述调节平台上的伺服夹臂,所述伺服夹臂之间连接有滑动连杆。
[0008]
作为本实用新型进一步的技术方案,所述伺服夹臂包括与所述调节平台以转轴的
方式连接、并且水平设置的第二伺服气缸,所述第二伺服气缸的输出端连接有至少一对平行设置的夹臂,该夹臂末端部还设有柔性固定块。
[0009]
作为本实用新型进一步的技术方案,还包括跨设于所述升降支撑托架与初级弯折夹臂上方的加工平台,所述找平顶板对称设于所述加工平台端面的两侧,包括与所述加工平台固定连接的第三伺服气缸以及设于第三伺服气缸一侧的找平轨道,与所述第三伺服气缸输出端固定连接并活动连接在所述找平轨道上的找平板。
[0010]
作为本实用新型进一步的技术方案,还包括跨设于所述升降支撑托架与初级弯折夹臂上方的加工平台,所述压平机构包括固定在所述加工平台上端、并且输出端竖直上下运动的第四伺服气缸,所述第四伺服气缸的输出端连接有正对于所述夹紧垫块上方的压块。
[0011]
作为本实用新型进一步的技术方案,所述次级弯折夹块包括与所述旋转伺服电机输出端固定连接的旋转块,所述旋转块的一侧设有压紧面,所述旋转块正对于所述压紧面平行设有的导向支架,所述导向支架设有输出端正对于压紧面的第五伺服气缸,所述第五伺服气缸的输出端连接有压块,所述夹紧垫块设于2个所述旋转块的中间。
[0012]
作为本实用新型进一步的技术方案,所述压紧面朝向所述升降支撑托架一侧的棱边设有用于引导的倒平角,相对于所述压紧面的另一面的一侧棱边设有用于过渡的倒圆角。
[0013]
作为本实用新型进一步的技术方案,所述夹紧垫块的两侧下方还对称设有卸料推板,所述卸料推板固定在设于所述加工平台下端面的第六伺服气缸的输出端。
[0014]
作为本实用新型进一步的技术方案,所述移动焊接平台包括水平设置于所述机架最上端的焊接滑轨以及滑轨电机,所述焊接机构为激光焊接装置。
[0015]
本实用新型具有的有益效果在于:可以进行片材的大口径卷料加工操作,还能够按照需要加工出不同的锥度,并且无需单独开模,有效综合了2种类型的卷料加工设备的加工范围,极大缩短了不同批次片材进行卷料加工的时间间隔,生产成本显著降低,生产效率得到了有效提高,从原理上改变了传统开模加工的工艺流程,因此作为新型的卷料加工设备来说具有广阔的应用前景。
附图说明
[0016]
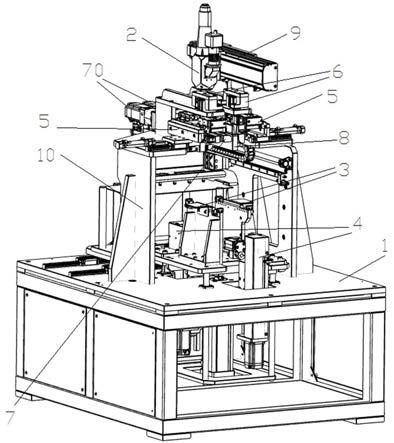
图1为本实用新型的整体结构示意图。
[0017]
图2为升降支撑托架3的局部放大结构图。
[0018]
图3为初级弯折夹臂4的局部放大结构图。
[0019]
图4为滑动连杆45以及转轴46的示意图。
[0020]
图5为卷料机构的正向局部放大结构图。
[0021]
图6为卷料机构的后向局部放大结构图。
[0022]
图7为本实用新型整体实施结构示意图。
[0023]
图8为片料初始状态示意图。
[0024]
图9为片料弯折状态示意图。
[0025]
其中:机架1、焊接机构2、升降支撑托架3、第一伺服气缸30、升降平台31、导向杆32、初级弯折夹臂4、夹持轨道40、导向丝杠41、调节平台42、丝杠电机43、伺服夹臂44、第二
伺服气缸440、夹臂441、滑动连杆45、转轴46、找平顶板5、第三伺服气缸50、找平轨道51、找平板52、限位伺服气缸53、l型限位片54、压平机构6、第四伺服气缸60、压块61、次级弯折夹块7、旋转伺服电机70、旋转块71、压紧面72、导向支架73、第五伺服气缸74、压块75、倒平角76、倒圆角77、夹紧垫块8、卸料推板80、第六伺服气缸81、移动焊接平台9、焊接滑轨90、滑轨电机91、加工平台10、焊接面平整机构11、滚轮12、自动上料平台13、移动轨道14、电动吸盘取料机构15。
具体实施方式
[0026]
下面结合附图与相关实施例对本实用新型的实施方式进行说明,需要指出的是,以下相关实施例仅是为了更好说明本实用新型本身而举的优选实施例,而本实用新型的实施方式不局限于如下的实施例中,并且本实用新型涉及本技术领域的相关必要部件,应当视为本技术领域内的公知技术,是本技术领域所属的技术人员所能知道并掌握的。
[0027]
在本实用新型的描述中,需要理解的是,术语
ꢀ“
横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“内”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了使之描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相対重要性或者隐含指明所指示的技术特征的数量;由此,限定有“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相対重要性或者隐含地包括一个或者更多个该特征。
[0028]
参照图1所示,一种自动卷料焊接机,包括机架1、卷料机构以及焊接机构2,所述卷料机构包括设于机架上成对的升降支撑托架3,设于所述升降支撑托架3水平对称中线两端、相互独立、成对的初级弯折夹臂4,设于所述升降支撑托架3上方成对的找平顶板5与压平机构6,设于所述找平顶板5与升降支撑托架3之间、与所述升降支撑托架3布局方向一致、成对的次级弯折夹块7,所述初级弯折夹臂4整体与所述升降支撑托架3的运动方向一致,所述次级弯折夹块7连接在水平放置于所述机架上方的旋转伺服电机70的输出端,且该次级弯折夹块7之间还设有与机架1相对静止的夹紧垫块8,所述焊接机构2连接有沿所述夹紧垫块8长度方向活动的移动焊接平台9,且该焊接机构2的输出端正对于所述夹紧垫块8的正上方。
[0029]
本实用新型的加工流程如下所示:进行常规的卷料焊接时,由于是标准的圆柱体结构,位于所述升降支撑托架3两侧所述初级弯折夹臂4的驱动装置运动参数一致;参照图8所示,首先,需要将片材放置于升降支撑托架3的上端然后将初级弯折夹臂同步上升至片材所在水平面,接着夹持片材的两侧,向下拉伸,直至片材的两端向上竖起并且由初级弯折夹臂4夹持的部分呈现圆弧状,其中,为了保证圆弧的弯折均匀,两侧的所述初级弯折夹臂4从片材的侧方水平面看过去,一个偏左而一个偏右,这样可以避免拉出的片材弧线变形的问题;然后升降支撑托架3以及初级弯折夹臂4保持当前的相对位置同时上升,此时,找平顶板5从两侧向内靠拢,使得片材的两端穿过所述次级弯折夹块7后能够被找平顶板5的下表面同时抵住,确定片材的两端边缘都处于同一水平面上,这样在进行后续的弯折操作时就能保证弯卷出来的管材上下均匀;参照图9所示,在片材的两端均找平以后,所述次级弯折夹块7固定住(非必须夹紧)找平后的片材两端,在旋转伺服电机70的作用下,向内靠拢弯折,
直至两端部用于焊接的位置在夹紧垫块8的上端相互合拢甚至重叠;接着压平机构6下压,令片材的两端均处于可以随时焊接的状态;压平机构6保持压平的状态,接着焊接机构2在移动焊接平台9的作用下,沿着焊缝的位置进行激光焊接,直至片材两端部被焊死,完成卷材的焊接成型。
[0030]
本实用新型相比较于传统的开模卷料焊接的设备不同之处在于,只要片材并非过长或者过短,在初级弯折夹臂4夹持片材的两侧下拉的过程中,只需要保证片材的两端能够进入次级弯折夹块7的夹持范围即可,片材较短时,所述初级弯折夹臂4下拉的距离就相对变短,片材较长时,则所述初级弯折夹臂4下拉的距离就边长,因此能够适应不同直径规格的卷料加工工艺需求。
[0031]
当进行带锥度片材的卷料操作时,与本实用新型进行常规卷料操作时不同的地方在于,由于带锥度的片材是一个扇形而非矩形,因此卷料出来的成品是一个上窄下宽或者上宽下窄的形状,为了保证在次级弯折夹块7进行弯折的过程中,片材的两端部边缘能够对齐,所述初级弯折夹臂4将会有不一样的动作流程;首先,同样参照图8所示,最初的夹持操作与常规卷料操作一致,同样是上升至所述升降支撑托架3同一水平面高度,将所述扇形的片材的两侧进行夹持;参照图9所示,然后所述初级弯折夹臂4向下拉,直至片材两端向上翘起,接着所述升降支撑托架3与所述初级弯折夹臂4同步上升;所述找平顶板5以及所述次级弯折夹块7为同样的设置方式,当片材的两端穿过所述次级弯折夹块7的夹持范围后,不同之处在于,与图8展示的常规拉弯操作相比,由于片材的两侧高度不同,因此较高的一侧的初级弯折夹臂4要上升更少的量或者较矮的一侧要上升更多的量,使得片材两端边缘处于同一水平高度并且被所述找平顶板5的下端面完全抵住,同时所述次级弯折夹块7才能在固定住所述片材的两端时,能够伸出同样均匀的部分进行后续的卷制、压平以及焊接操作;最终,在焊接机构2完成焊接操作后,带锥度的卷制加工完成。
[0032]
本实用新型通过改变两侧所述初级弯折夹臂4上升的量,使其能够在不需要改变安装连接方式以及不需要进行开模的前提下,仅通过改变参数设置,就能从标准圆柱筒的加工转换成带锥度卷筒的加工,并且可以适应的锥度范围以及加工精度均能满足加工需求,效率高、成本低、加工效果好。
[0033]
参照图2所示,本实用新型较优的实施例之一,还包括与所述机架1固定连接且输出端竖直向上的第一伺服气缸30,所述第一伺服气缸30的输出端连接有升降平台31,所述升降平台31的端部连接有相互平行且活动穿设于机架端面的导向杆32,所述升降支撑托架3设于所述升降平台31的端面。
[0034]
所述升降支撑托架3的上端为了更好的承托片材,优选设置如图所示的托板,方便片材能够稳定放置,而升降平台31以及导向杆32的结构,可以让所述升降支撑托架3可以在更加平稳的条件下进行抬升或者下降,确保片材能够增加准确的进行找平。
[0035]
结合图2、图3、图4所示,本实用新型较优的实施例之一,所述初级弯折夹臂4包括与所述机架1固定连接的夹持轨道40,设于所述夹持轨道40一侧的导向丝杠41,与所述夹持轨道40和导向丝杠41活动连接的调节平台42,与所述导向丝杠41的一端固定连接的丝杠电机43以及活动连接于所述调节平台42上的伺服夹臂44,所述伺服夹臂44之间连接有滑动连杆45。
[0036]
夹持轨道40以及导向丝杠41的设置,令调节平台42可以在丝杠电机43的作用下,
沿着夹持轨道40以及导向丝杠41进行准确稳定的上下运动,使得对片材的拉弯以及维持拉弯的状态能够可控,低误差,伺服夹臂44在非夹持状态下应当向外伸出,使得所述初级弯折夹臂4能够从放置完成的片材的两侧升起,从而进行夹持;而所述伺服夹臂44与所述调节平台42之间活动连接,同时,所述伺服夹臂44之间连接有滑动连杆45,该滑动连杆45设有光滑杆身,且端部设有限位结构,自身同时穿设在两侧伺服夹臂44设有的套筒结构之中,这样,当需要弯折有锥度的卷材时,较高一侧的伺服夹臂44会在滑动连杆45的牵引作用下向低处倾斜,同理,较低一侧的伺服夹臂44会在滑动连杆45的作用下向较高处倾斜,这样就能确保在加工有锥度的卷材时不会因为上下高低差的缘故导致伺服夹臂44的夹持位置发生折痕,并且确保卷材的侧面形状均匀一致。
[0037]
参照图3和图4所示,本实用新型较优的实施例之一,所述伺服夹臂44包括与所述调节平台42以转轴46的方式连接、并且水平设置的第二伺服气缸440,所述第二伺服气缸440的输出端连接有至少一对平行设置的夹臂441,该夹臂441末端部还设有柔性固定块。
[0038]
所述第二伺服气缸440带动所述夹臂441在水平方向上进行运动,为了提高装夹效率,同一第二伺服气缸440上的2个所述夹臂441之间相对维持保持一定并且具有较宽的间隙,这样可以避免因夹太紧导致对片材表面造成伤害,同时,在进行带锥度的卷料操作时,由于两侧的所述初级弯折夹臂4的相对高度不一致,这部分间隙的存在也能够避免片材的两侧因夹臂441的作用而产生折痕;而转轴46则能够保证所述第二伺服气缸440与所述调节平台42之间可以绕转轴46转动,该转轴46如图所示,其轴线垂直于升降方向,这样可以通过滑动连杆45实现两侧的伺服夹臂44联动。
[0039]
结合图5和图6所示,本实用新型较优的实施例之一,还包括跨设于所述升降支撑托架3与初级弯折夹臂4上方的加工平台10,所述找平顶板5对称设于所述加工平台10端面的两侧,包括与所述加工平台10固定连接的第三伺服气缸50以及设于第三伺服气缸50一侧的找平轨道51,与所述第三伺服气缸50输出端固定连接并活动连接在所述找平轨道51上的找平板52。
[0040]
所述加工平台10是设置与所述机架1上方用于固定焊接机构2、找平顶板5、压平机构6、次级弯折夹块7、夹紧垫块8、移动焊接平台9的架体,所述找平顶板5由两侧的第三伺服气缸50驱动,在所述找平轨道51的结构支持下,平稳地在水平面上沿着片材的两端方向进行运动,优选的,所述压平机构6与所述找平顶板5应当如图所示那样在空间上进行配合,避免发生干涉现象。
[0041]
结合图5和图6所示,所述找平板52的上端还设有输出端朝向找平板52侧方的限位伺服气缸53,所述限位伺服气缸53的输出端连接有l型限位片54。
[0042]
所述l型限位片54在限位伺服气缸53的作用下沿着所述片材的两侧方向进行运动,该l型限位片54的作用主要是在进行超宽片材的卷料加工时,该片材的两侧均能被所述l型限位片54所限位,方便在进行卷料操作的时候,卷料的过程更加顺利,卷出来的筒体的形状更加均匀。
[0043]
结合图5和图6所示,本实用新型较优的实施例之一,还包括跨设于所述升降支撑托架3与初级弯折夹臂4上方的加工平台10,所述压平机构6包括固定在所述加工平台10上端、并且输出端竖直上下运动的第四伺服气缸60,所述第四伺服气缸60的输出端连接有正对于所述夹紧垫块8上方的压块61。
[0044]
所述压块61如图所示在第四伺服气缸60的驱动下上下运动,并由所述加工平台10的架体提供导向用的通孔供所述压块61的驱动用杆精确运动,同时,为了提高空间布局的利用率,所述第四伺服气缸60的输出端可以竖直向上,而所述压块61的连杆可以通过设置在所述第四伺服气缸60输出端的平板进行连接,此外,所述压块61之间应当留有供焊接机构2焊接时候光路或者焊线经过的空隙,否则就需要为压平机构6提供左右运动的结构。
[0045]
结合图5和图6所示,本实用新型较优的实施例之一,所述次级弯折夹块7包括与所述旋转伺服电机70输出端固定连接的旋转块71,所述旋转块71的一侧设有压紧面72,所述旋转块71正对于所述压紧面72平行设有的导向支架73,所述导向支架73设有输出端正对于压紧面72的第五伺服气缸74,所述第五伺服气缸74的输出端连接有压块75,所述夹紧垫块8设于2个所述旋转块71的中间。
[0046]
所述次级弯折夹块7的旋转块71以及与旋转块71连接的部分均由所述旋转伺服电机70驱动,片材的端部需要经过的区域为所述压紧面72以及压块75之间的空间,当片材的端部经过该区域后,所述压块75则会在第五伺服气缸74的驱动下沿着导向支架73的导向孔结构向所述压紧面72靠拢直至初步夹住片材,然后随着旋转伺服电机70的作用下,两侧的片材的端部相互靠拢,相互靠拢的过程中,为了保证成型的稳定,所述第五伺服气缸74可以视情况增加加持力或者降低加持力。
[0047]
参照图5所示,本实用新型较优的实施例之一,所述压紧面72朝向所述升降支撑托架3一侧的棱边设有用于引导的倒平角76,相对于所述压紧面72的另一面的一侧棱边设有用于过渡的倒圆角77。
[0048]
为了更好地引导片材的端部进入,设置了倒平角76结构,同理为了更好地进行弯折,设置了倒圆角77结构,其中所述倒圆角77的半径可以与所述旋转块71的宽度一致。
[0049]
结合图5和图6所示,本实用新型较优的实施例之一,所述夹紧垫块8的两侧下方还对称设有卸料推板80,所述卸料推板80固定在设于所述加工平台10下端面的第六伺服气缸81的输出端。
[0050]
所述卸料推板80在第六伺服气缸81的作用下,可以及时将焊接完成的筒体从夹紧垫块8上推出,从而进行卸料或者是后续进一步加工的落位。
[0051]
结合图1和图7所示,本实用新型较优的实施例之一,所述移动焊接平台9包括水平设置于所述机架1最上端的焊接滑轨90以及滑轨电机91,所述焊接机构2为激光焊接装置。
[0052]
利用所述移动焊接平台9实际上等同于轨道电机及其移动装置,方便焊接机构2可以平稳地完成焊接工作,而激光焊接装置相比较于一般的氩弧焊而言对加工环境的要求更低,且污染更小,效率更高,精度更佳。
[0053]
参照图7所示,作为本实用新型进一步的技术方案之一,本实用新型还可设置有焊接面平整机构11,该焊接面平整机构11同样设置于所述机架1的上端,该焊接面平整机构由相互联动的伺服气缸以及滑轨驱动,使得焊接完成的卷材的焊缝能放置在该机构的加工平面上、由气缸驱动的滚轮12在焊缝上进行滚压,从而使得焊缝变得平整。
[0054]
结合图7所示,在完成焊接操作以后,焊缝可能会不够平整,因此在卸料推板80的作用下,可以将卷制完成的筒体推送至焊接面平整机构11之中,进入工位以后,在伺服气缸的用下,滚轮12会下压带动压块在焊缝位置进行压平,从而提高加工出来成品的外观观感。
[0055]
参照图7所示,作为本实用新型进一步的技术方案之一,本实用新型还可在机架1
上设有由气缸驱动的自动上料平台13以及与自动上料平台13配合、且通过固定在所述加工平台10上移动轨道14的上的电动吸盘取料机构15,这样就可以很方便地将放置于自动上料平台13上的片材逐片放置在升降支撑托架3上进行卷料焊接加工而无需手动加料,十分方便。
[0056]
为了提高上料的效率,同样还可以增加如图6所示的自动取料机构,该自动上料平台13在伺服气缸的作用下随着片材被一片片取走,伴随进行一点点上升,而所述电动吸盘取料机构15则通过移动轨道14在自动上料平台13与所述升降支撑托架3之间来回切换,利用吸气和放气的操作来完成抓料、运料以及放料的步骤。
[0057]
本实用新型具有的有益效果在于:可以进行片材的大口径卷料加工操作,还能够按照需要加工出不同的锥度,并且无需单独开模,有效综合了2种类型的卷料加工设备的加工范围,极大缩短了不同批次片材进行卷料加工的时间间隔,生产成本显著降低,生产效率得到了有效提高,从原理上改变了传统开模加工的工艺流程,因此作为新型的卷料加工设备来说具有广阔的应用前景。
[0058]
以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1