汽车悬架下控制臂机器人焊接设备及焊接方法与流程
1.本发明属于汽车零部件生产设备技术领域,具体地说,本发明涉及一种汽车悬架下控制臂机器人焊接设备及焊接方法。
背景技术:
2.汽车悬架下控制臂主要是由控制臂本体和盖板构成,在制作时,盖板需与控制臂本体进行焊接连接。现有用于汽车悬架下控制臂焊接加工的焊接设备只设置一个工位,该工位既用于焊接,也有用于上下件。机器人在焊接时,操作人员不能进行上件和取件工作;操作人员在进行上件或取件工作时,机器人处于停机状态。这种加工方式比较耗费时间,导致工作效率较低。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提供一种汽车悬架下控制臂机器人焊接设备,目的是提高焊接工作效率,减少焊接设备占地面积。
4.为了实现上述目的,本发明采取的技术方案为:汽车悬架下控制臂机器人焊接设备,包括焊房、焊接机器人、焊接工装、设置于所述焊房内且用于控制焊接工装在第一工位与第二工位之间进行切换的三轴水平旋转变位机和设置于三轴水平旋转变位机上用于遮挡所述焊接机器人在进行焊接工作时产生的弧光的遮挡装置,三轴水平旋转变位机包括可旋转设置的承载架、可旋转设置的第一翻转支架和第二翻转支架、设置于承载架上且用于控制第一翻转支架进行旋转的第一驱动装置以及设置于承载架上且用于控制第二翻转支架进行旋转的第二驱动装置,第一翻转支架和第二翻转支架上各安装至少两个焊接工装,焊接机器人设置于承载架上且焊接机器人至少设置两个,焊接机器人位于第一翻转支架和第二翻转支架之间。
5.所述第一翻转支架和所述第二翻转支架的旋转中心线相平行,所述承载架的旋转中心线为竖直线。
6.所述承载架包括两个相对布置的旋转臂和与两个旋转臂连接的横梁,横梁位于两个旋转臂之间,所述第一驱动装置和所述第二驱动装置设置于旋转臂上,所述第一翻转支架和第二翻转支架分别位于横梁的相对两侧。
7.所述遮挡装置包括第一遮光板、第二遮光板、设置于承载架上且用于控制第一遮光板进行升降的第一升降控制装置和设置于承载架上且用于控制第二遮光板进行升降的第二升降控制装置。
8.所述第一遮光板位于所述焊接机器人和所述第一翻转支架之间,所述第二遮光板位于所述焊接机器人和所述第二翻转支架之间。
9.所述焊接工装包括底板、设置于底板上且用于在控制臂本体的一端夹紧控制臂本体的第一夹紧装置、设置于底板上且用于在控制臂本体的另一端夹紧控制臂本体和用于将盖板压紧固定在控制臂本体上的第二夹紧装置、设置于底板上且用于对控制臂本体提供支
撑的支撑装置以及设置于底板上且用于对控制臂本体和盖板进行定位的定位装置。
10.所述定位装置包括设置于所述底板上的第一定位座、第二定位座、第三定位座和第四定位座、第一定位销、第二定位销和第三定位销、设置于第一定位座上且用于控制第一定位销进行升降的第一定位气缸、设置于第二定位座上且用于控制第二定位销进行升降的第二定位气缸、设置于第三定位座上且用于控制第三定位销进行直线移动的第三定位气缸以及设置于第四定位座上的第四定位销,盖板具有让第一定位销和第二定位销分别插入的两个定位孔,控制臂本体具有让第三定位销和第四定位销分别插入的两个定位孔。
11.所述第一夹紧装置包括可旋转设置的第一夹紧臂、设置于第一夹紧臂上的第一上夹块、设置于底板上的托架、设置于托架上且与第一上夹块相配合以夹紧控制臂本体的第一下夹块和设置于第一夹紧支架上且用于对盖板施加压力的第一压块。
12.所述第二夹紧装置包括可旋转设置的第二夹紧臂、设置于第二夹紧臂上的第二上夹块、与第二上夹块相配合以夹紧控制臂本体的第二下夹块、设置于底板上且用于控制第二下夹块进行直线移动的夹具和设置于第二夹紧支架上且用于对盖板施加压力的压紧机构,压紧机构包括与第二夹紧支架转动连接的压紧座以及设置于压紧座上的第二压块和第三压块。
13.本发明还提供了一种汽车悬架下控制臂机器人焊接方法,采用所述的汽车悬架下控制臂机器人焊接设备,且包括步骤:
14.s1、在第一工位处的焊接工装上进行上件工作;
15.s2、三轴水平旋转变位机进行水平旋转,将装有工件的焊接工装旋转至第二工位处;
16.s3、焊接机器人进行焊接工作,同时在第一工位处的焊接工装上再次进行上件工作;
17.s4、焊接完成后,三轴水平旋转变位机再次进行水平旋转;
18.s5、在第一工位处进行取件工作,同时焊接机器人进行焊接工作。
19.本发明的汽车悬架下控制臂机器人焊接设备,通过设置三轴水平旋转变位机实现工件在两个工位之间的切换,其中一个工位用于焊接的同时,另一个工位可以用于上下件,从而可以提高焊接工作效率;而且通过将焊接机器人设置在三轴水平旋转变位机上,可以减少占地面积,对三轴水平旋转变位机的主轴中心精度要求不高,有助于提高产品焊接质量。
附图说明
20.本说明书包括以下附图,所示内容分别是:
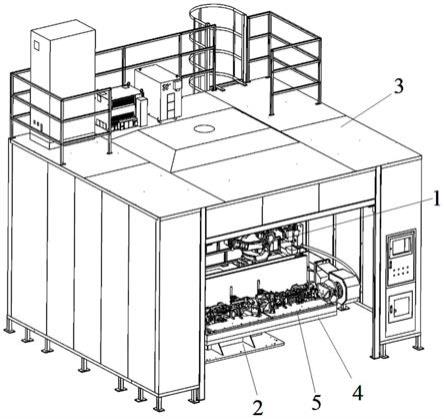
21.图1是本发明汽车悬架下控制臂机器人焊接设备的结构示意图;
22.图2是本发明汽车悬架下控制臂机器人焊接设备的结构示意图的内部结构示意图;
23.图3是三轴水平旋转变位机的侧视图;
24.图4是焊接工装的结构示意图;
25.图5是焊接工装的使用状态示意图;
26.图6是焊接工装的另一使用状态示意图;
27.图7是汽车悬架下控制臂的结构示意图;
28.图中标记为:
29.1、焊接机器人;2、底座;3、焊房;4、三轴水平旋转变位机;401、第一遮光板;402、第二遮光板;403、防护栏;404、第一翻转支架;405、第二翻转支架;406、第一驱动装置;407、第二驱动装置;408、旋转臂;409、横梁;410、主驱动装置;5、底板;6、盖板;7、控制臂本体;8、第一定位座;9、第二定位座;10、第三定位座;11、第四定位座;12、第一定位销;13、第二定位销;14、第三定位销;15、第四定位销;16、第一定位气缸;17、第二定位气缸;18、第三定位气缸;19、第一夹紧器;20、第一夹紧臂;21、第一上夹块;22、托架;23、第一下夹块;24、第一压块;25、第二夹紧器;26、第三压块;27、第二夹紧臂;28、第二上夹块;29、第二下夹块;30、夹具;31、压紧座;32、第二压块;33、第一支撑块;34、第二支撑块;35、第三支撑块;36、限位块。
具体实施方式
30.下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,目的是帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理解,并有助于其实施。
31.需要说明的是,在下述的实施方式中,所述的“第一”、“第二”、“第三”和“第四”并不代表结构和/或功能上的绝对区分关系,也不代表先后的执行顺序,而仅仅是为了描述的方便。
32.如图1至图7所示,本发明提供了一种汽车悬架下控制臂机器人焊接设备,包括焊房3、焊接机器人1、焊接工装、设置于焊房3内且用于控制焊接工装在第一工位与第二工位之间进行切换的三轴水平旋转变位机4和设置于三轴水平旋转变位机4上用于遮挡焊接机器人1在进行焊接工作时产生的弧光的遮挡装置,三轴水平旋转变位机4包括可旋转设置的承载架、可旋转设置的第一翻转支架404和第二翻转支架405、设置于承载架上且用于控制第一翻转支架404进行旋转的第一驱动装置406以及设置于承载架上且用于控制第二翻转支架405进行旋转的第二驱动装置407,第一翻转支架404和第二翻转支架405上各安装至少两个焊接工装,焊接机器人1设置于承载架上且焊接机器人1至少设置两个,焊接机器人1位于第一翻转支架404和第二翻转支架405之间。
33.具体地说,如图1和图2所示,焊接机器人1位于焊房3的内腔体中,三轴水平旋转变位机4固定设置在焊房3的内腔体中,三轴水平旋转变位机4上设置两个工位,两个工位分别为第一工位和第二工位,第一工位为上下件工位,第二工位为焊接工位。三轴水平旋转变位机4上安装有焊接工装,在第一工位处,操作人员可以将汽车悬架下控制臂的各个组成部件安放在焊接工装上,进行上件工作;在第一工位处,操作人员也可以将焊接完成的汽车悬架下控制臂取下,进行取件工作。在第二工位处,由焊接机器人1对汽车悬架下控制臂的各个组成部件之间进行焊接。
34.如图1至图3所示,第一翻转支架404和第二翻转支架405的旋转中心线相平行,第一翻转支架404和第二翻转支架405的旋转中心线为水平线,承载架的旋转中心线为竖直线。承载架进行水平旋转时,可以带动第一翻转支架404、第二翻转支架405和焊接机器人1同步进行水平旋转,实现焊接工装在第一工位与第二工位之间的切换。三轴水平旋转变位机4还包括用于提供使承载架进行旋转的驱动力的主驱动装置410,主驱动装置410设置在
底座2上,底座2固定设置在焊房3的内腔体中,主驱动装置410位于承载架的下方,主驱动装置410的动力输出端与承载架连接,主驱动装置410的轴线也即承载架的旋转中心线,承载架的旋转中心线位于第一翻转支架404和第二翻转之间的中间位置处。主驱动装置410用于提供使承载架绕第一轴进行旋转的驱动力,主驱动装置410主要包括电机和传动机构,传动机构与电机和承载架连接。承载架为水平设置,承载架位于底座2的上方。第一驱动装置406控制第一翻转支架404绕第二轴进行旋转,第二驱动装置407控制第二翻转支架405绕第三轴进行旋转,第二轴和第三轴与第一方向相平行,第一方向为水平方向,第一轴为竖直轴,第一轴位于第二轴和第三轴的中间位置处,第一轴也位于两个焊接机器人1的中间位置处。因此,承载架可以带动第一翻转支架404和第二翻转支架405以及焊接机器人1同步绕第一轴进行旋转,同时,第一翻转支架404和第二翻转支架405也可以相对于承载架进行旋转,可以实现焊接时与焊接机器人1的协同工作。
35.如图1至图3所示,承载架包括两个相对布置的旋转臂408和与两个旋转臂408连接的横梁409,横梁409位于两个旋转臂408之间,第一驱动装置406和第二驱动装置407设置于旋转臂408上,第一翻转支架404和第二翻转支架405分别位于横梁409的相对两侧。旋转臂408和横梁409均为水平设置,两个旋转臂408的长度方向相平行,横梁409的长度方向上的两端是分别在两个旋转臂408的长度方向上的中间位置处与旋转臂408固定连接,承载架呈工字型结构,主驱动装置410是在横梁409的长度方向上的中间位置处与横梁409连接。第一翻转支架404和第二翻转支架405为可旋转的设置在其中一个旋转臂408的长度方向上的两端,第一驱动装置406和第二驱动装置407设置在另一个旋转臂408的长度方向上的两端,第一驱动装置406与第一翻转支架404连接,第一驱动装置406用于提供使第一翻转支架404进行旋转的驱动力,第二驱动装置407与第二翻转支架405连接,第一驱动装置406用于提供使第二翻转支架405进行旋转的驱动力。第一驱动装置406和第二驱动装置407的结构基本相同,主要包括电机。
36.如图1至图3所示,遮挡装置包括第一遮光板401、第二遮光板402、设置于承载架上且用于控制第一遮光板401进行升降的第一升降控制装置和设置于承载架上且用于控制第二遮光板402进行升降的第二升降控制装置。横梁409位于第一遮光板401和第二遮光板402之间,第一遮光板401、第二遮光板402和横梁409均为矩形结构,第一遮光板401和第二遮光板402为竖直设置。第一遮光板401位于焊接机器人1和第一翻转支架404之间,第二遮光板402位于焊接机器人1和第二翻转支架405之间,所有焊接机器人1布置在第一遮光板401和第二遮光板402之间,所有焊接机器人1为沿横梁409的长度方向依次布置,横梁409的长度方向与旋转臂408的长度方向相垂直,第一遮光板401和第二遮光板402的长度方向与横梁409的长度方向相平行。第一遮光板401和第二遮光板402位于第一工位和第二工位之间,第一遮光板401和第二遮光板402为金属材质制成,优选采用防弧光板材制成。第一遮光板401设置成可在遮挡状态与下降状态之间进行切换,第二遮光板402也设置成可在遮挡状态与下降状态之间进行切换,当第一翻转支架404处于第一工位时,第二翻转支架405处于第二工位,此时第一遮光板401处于遮挡状态,第二遮光板402处于下降状态,第一遮挡板的高度大于第二遮挡板的高度,此时第一遮光板401在焊接机器人1与第一翻转支架404之间形成阻挡,第一遮光板401可以用于遮挡焊接过程中产生的弧光,降低第一工位处及焊房3外的弧光强度,从而可以减少对第一工位处进行上下件工作的操作人员造成的伤害,而此时第
二遮光板402在焊接机器人1与第二翻转支架405之间不能形成阻挡,第二遮光板402所在的高度位置不能影响焊接机器人1对位于第二翻转支架405的焊接工装上的汽车悬架下控制臂的组成部件之间进行焊接加工。当第二翻转支架405处于第一工位时,第一翻转支架404处于第二工位,此时第二遮光板402处于遮挡状态,第一遮光板401处于下降状态,第二遮挡板的高度大于第一遮挡板的高度,第二遮光板402在焊接机器人1与第二翻转支架405之间形成阻挡,,此时第二遮光板402可以用于遮挡焊接过程中产生的弧光,降低第一工位处及焊房3外的弧光强度,从而可以减少对第一工位处进行上下件工作的操作人员造成的伤害,而此时第一遮光板401在焊接机器人1与第一翻转支架404之间不能形成阻挡,第一遮光板401所在的高度位置不能影响焊接机器人1对位于第一翻转支架404的焊接工装上的汽车悬架下控制臂的组成部件之间进行焊接加工。
37.如图1至图3所示,第一升降控制装置是用于控制第一遮光板401在遮挡状态与下降状态之间进行切换,第一升降控制装置设置在横梁409上,第一升降控制装置主要包括第一升降执行器和第一导轨,第一升降执行器和第一导轨设置在横梁409上,第一升降执行器与第一遮光板401连接,第一升降执行器为竖直设置,第一升降执行器为可伸缩的构件,第一导轨用于对第一遮光板401起到导向作用,第一导轨与第一遮光板401为滑动连接,第一导轨为竖直设置。第一升降执行器伸长时,可以推动第一遮光板401向上移动,使第一遮光板401由下降状态切换至遮挡状态;第一升降执行器收缩时,可以拉动第一遮光板401向下移动,使第一遮光板401由遮挡状态切换至下降状态。
38.如图1至图3所示,第二升降控制装置是用于控制第二遮光板402在遮挡状态与下降状态之间进行切换,第二升降控制装置设置在横梁409上,第二升降控制装置主要包括第二升降执行器和第二导轨,第二升降执行器和第二导轨设置在横梁409上,第二升降执行器与第二遮光板402连接,第二升降执行器为竖直设置,第二升降执行器为可伸缩的构件,第二导轨用于对第二遮光板402起到导向作用,第二导轨与第二遮光板402为滑动连接,第二导轨为竖直设置。第二升降执行器伸长时,可以推动第二遮光板402向上移动,使第二遮光板402由下降状态切换至遮挡状态;第二升降执行器收缩时,可以拉动第二遮光板402向下移动,使第二遮光板402由遮挡状态切换至下降状态。
39.如图1至图3所示,第一升降执行器和第二升降执行器具有多种形式,可以为气缸、液压缸或电缸。在本实施例中,第一升降执行器和第二升降执行器优选为气缸。
40.如图1至图3所示,承载架还包括设置于旋转臂408上的防护栏403,防护栏403为水平设置且防护栏403位于旋转臂408的外部,防护栏403为圆弧形结构,防护栏403的轴线与承载架的旋转中心线为同一竖直线,各个旋转臂408上各设置一个防护栏403。在承载架旋转过程中,防护栏403同步旋转,焊接机器人、旋转臂408、焊接工装及其上的工件均位于防护栏403的外边缘所在圆周的范围内,防护栏403可以起到防护作用。
41.如图4至图7所示,汽车悬架下控制臂是由控制臂本体7和盖板6构成,控制臂本体7具有一定的长度,控制臂本体7的长度方向上的两端均设置有销轴穿过的轴孔,两个轴孔的轴线相平行且两个轴孔的轴线与控制臂本体7的长度方向相垂直。盖板6为具有一定长度的平板,盖板6的长度方向与控制臂本体7的长度方向相平行,盖板6需设置成与控制臂本体7的一侧外壁面相贴合并与控制臂本体7进行焊接连接,形成汽车悬架下控制臂。
42.如图4至图7所示,焊接工装包括底板5、设置于底板5上且用于在控制臂本体7的一
端夹紧控制臂本体7的第一夹紧装置、设置于底板5上且用于在控制臂本体7的另一端夹紧控制臂本体7和用于将盖板6压紧固定在控制臂本体7上的第二夹紧装置、设置于底板5上且用于对控制臂本体7提供支撑的支撑装置以及设置于底板5上且用于对控制臂本体7和盖板6进行定位的定位装置。对于安装在第一翻转支架404上的焊接工装,该焊接工装的底板5与第一翻转支架404固定连接,该底板5的长度方向与第一翻转支架404的长度方向相平行。对于安装在第二翻转支架405上的焊接工装,该焊接工装的底板5与第二翻转支架405固定连接,该底板5的长度方向与第二翻转支架405的长度方向相平行。支撑装置是用于对控制臂本体7提供支撑,以使控制臂本体7保持在水平状态,控制臂本体7被夹紧固定后,控制臂本体7的长度方向与底板5的长度方向相平行,控制臂本体7的宽度方向与底板5的宽度方向相平行,底板5的长度方向和宽度方向均为水平方向。支撑装置位于第一夹紧装置和第二夹紧装置之间,支撑装置包括竖直设置于底板5上的多个第一支撑块33、第二支撑块34和第三支撑块35,第一支撑块33、第二支撑块34和第三支撑块35为沿底板5的长度方向依次布置,第一支撑块33、第二支撑块34和第三支撑块35的下端与底板5的顶面固定连接,第一支撑块33、第二支撑块34和第三支撑块35的上端用于与控制臂本体7相接触。
43.在本实施例中,如图4至图7所示,第一支撑块33设置两个,两个第一支撑块33处于与底板5的宽度方向相平行的同一直线上,两个第一支撑块33是分别在控制臂本体7的宽度方向上的两端边缘处对控制臂本体7提供支撑作用。第二支撑块34设置两个,两个第二支撑块34处于与底板5的宽度方向相平行的同一直线上,两个第二支撑块34是分别在控制臂本体7的宽度方向上的两端边缘处对控制臂本体7提供支撑作用。第三支撑块35设置两个,两个第三支撑块35处于与底板5的宽度方向相平行的同一直线上,两个第三支撑块35是分别在控制臂本体7的宽度方向上的两端边缘处对控制臂本体7提供支撑作用。通过第一支撑块33、第二支撑块34和第三支撑块35的相配合,可以对控制臂本体7提供稳定支撑,使控制臂本体7保持水平状态。
44.如图4至图7所示,定位装置包括设置于底板5上的第一定位座8、第二定位座9、第三定位座10和第四定位座11、第一定位销12、第二定位销13和第三定位销14、设置于第一定位座8上且用于控制第一定位销12进行升降的第一定位气缸16、设置于第二定位座9上且用于控制第二定位销13进行升降的第二定位气缸17、设置于第三定位座10上且用于控制第三定位销14进行直线移动的第三定位气缸18以及设置于第四定位座11上的第四定位销15,盖板6具有让第一定位销12和第二定位销13分别插入的两个定位孔,控制臂本体7具有让第三定位销14和第四定位销15分别插入的两个定位孔。
45.如图4至图7所示,第一定位座8和第二定位座9固定设置在底板5的顶面上,第一定位座8和第二定位座9处于与底板5的长度方向相平行的同一直线上,第一定位气缸16为竖直设置在第一定位座8上,第一定位销12为竖直设置,第一定位销12为圆柱形,第一定位销12与第一定位气缸16的活塞杆固定连接,第一定位气缸16用于控制第一定位销12沿竖直方向进行直线移动。第二定位气缸17为竖直设置在第二定位座9上,第二定位销13为竖直设置,第二定位销13为圆柱形,第二定位销13与第二定位气缸17的活塞杆固定连接,第二定位气缸17用于控制第二定位销13沿竖直方向进行直线移动。在进行上件时,将盖板6放置在控制臂本体7的顶面上,盖板6呈水平状态,第一定位气缸16和第二定位气缸17伸长,分别推动第一定位销12和第二定位销13向上移动,第一定位销12穿过控制臂本体7上的一通孔后插
入盖板6上的一个定位孔中,第二定位销13穿过控制臂本体7上的另一通孔后插入盖板6上的另一个定位孔中,从而实现盖板6的定位,盖板6上的两个定位孔分别位于盖板6的长度方向上的两端,盖板6的长度方向与控制臂本体7的长度方向相平行。
46.如图4至图7所示,第三定位座10和第四定位座11固定设置在底板5的顶面上,第一定位座8、第二定位座9、第三定位座10和第四定位座11处于与底板5的长度方向相平行的同一直线上,而且第一定位座8和第二定位座9是位于第三定位座10和第四定位座11之间,第三定位气缸18为水平设置在第三定位座10上,第三定位销14为水平设置,第三定位销14与第三定位气缸18的活塞杆固定连接,第三定位销14为圆柱形,第三定位销14的轴线与底板5的宽度方向相平行,第三定位气缸18用于控制第三定位销14沿竖直方向进行直线移动,以使第三定位销14插入控制臂本体7的长度方向上的一端的轴孔中或从该轴孔中抽出。第四定位销15为竖直设置,第四定位销15为圆柱形,第四定位销15的下端与第四定位座11固定连接。在进行上件时,将控制臂本体7放置在支撑装置上,使第四定位销15插入控制臂本体7的一端的定位孔中,第三定位气缸18伸长,推动第三定位销14沿水平方向进行移动,使第三定位销14插入控制臂本体7的一端的轴孔中,从而通过第三定位销14和第四定位销15的配合,实现控制臂本体7的定位,控制臂本体7的轴孔的轴线与底板5的宽度方向相平行。
47.如图4至图7所示,第一夹紧装置包括第一夹紧器19、可旋转设置的第一夹紧臂20、设置于第一夹紧臂20上的第一上夹块21、设置于底板5上的托架22、设置于托架22上且与第一上夹块21相配合以夹紧控制臂本体7的第一下夹块23和设置于第一夹紧支架上且用于对盖板6施加压力的第一压块24。第一夹紧器19用于控制第一夹紧臂20进行上下旋转,第一夹紧臂20的旋转中心线为水平线,第一夹紧器19为固定设置在底板5上,第一夹紧器19为气动夹紧器,第一夹紧器19与第三定位座10处于与底板5的宽度方向相平行的同一直线上。第一上夹块21固定设置在第一夹紧臂20上,第一上夹块21用于与控制臂本体7的侧边缘的顶面接触,托架22固定设置在底板5的顶面上,第一下夹块23固定设置在托架22上,第一下夹块23用于与控制臂本体7的侧边缘的底面接触。第一压块24固定设置在第一夹紧臂20上,第一压块24和第一上夹块21为沿第一夹紧臂20的长度方向依次布置。在进行上件时,在夹紧控制臂本体7后,第一上夹块21与第一下夹块23配合夹紧控制臂本体7的第一部位,第一下夹块23位于控制臂本体7的下方,第一上夹块21位于控制臂本体7的上方,第一压块24对盖板6施加向下的压力,第一压块24与盖板6的顶面相接触,第一压块24和第一定位销12位于盖板6的同一部位,第一定位销12穿过的定位孔为在盖板6顶面设置的圆孔。
48.如图4至图7所示,第二夹紧装置包括第二夹紧器25、可旋转设置的第二夹紧臂27、设置于第二夹紧臂27上的第二上夹块28、与第二上夹块28相配合以夹紧控制臂本体7的第二下夹块29、设置于底板5上且用于控制第二下夹块29进行直线移动的夹具30和设置于第二夹紧支架上且用于对盖板6施加压力的压紧机构,压紧机构包括与第二夹紧支架转动连接的压紧座31以及设置于压紧座31上的第二压块32和第三压块26。第二夹紧器25用于控制第二夹紧臂27进行上下旋转,第二夹紧臂27的旋转中心线为水平线且第二夹紧臂27的旋转中心线与底板5的宽度方向相平行,第二夹紧器25为固定设置在底板5上,第二夹紧器25为气动夹紧器,第二夹紧器25与第一定位座8和第二定位座9处于与底板5的长度方向相平行的同一直线上。第二上夹块28固定设置在第二夹紧臂27上,第二上夹块28设置两个,两个第二上夹块28是分别用于与控制臂本体7的两个相对的内壁面接触。第二下夹块29设置两个,
两个第二上夹块28是分别用于与控制臂本体7的两个外壁面接触,两个第二下夹块29处于与底板5的宽度方向相平行的同一直线上,夹具30固定设置在底板5的顶面上,夹具30与两个第二下夹块29连接,该夹具30是用于控制两个第二下夹块29作相向运动或相背离运动,夹具30为气动夹持器,夹具30位于第二夹紧器25和第二定位座9之间。压紧座31与第二夹紧臂27转动连接,压紧座31的旋转中心线与第二夹紧臂27的旋转中心线相平行,压紧座31和第二上夹块28为沿第二夹紧臂27的长度方向依次布置,第二压块32和第三压块26分别设置在压紧座31的长度方向上的相对两端。在进行上件时,在夹紧控制臂本体7后,第二上夹块28与第二下夹块29配合夹紧控制臂本体7的第二部位,两个第二上夹块28插入控制臂本体7的内腔体中并分别与控制臂本体7的两个相对的内壁面接触,控制臂本体7位于两个第二下夹块29之间且两个第二下夹块29分别与控制臂本体7的两个外壁面接触,此时两个第二上夹块28和两个第二下夹块29处于与底板5的宽度方向相平行的同一直线上,各个第二上夹块28分别与一个第二下夹块29相配合,夹紧控制臂本体7的一个侧壁,第二压块32和第三压块26对盖板6施加向下的压力,第二压块32和第三压块26与盖板6的顶面相接触,第一压块24、第二压块32和第三压块26为沿盖板6的长度方向依次布置,且第二压块32位于第一压块24和第三压块26之间,第三压块26和第二定位销13位于盖板6的同一部位,第二定位销13穿过的定位孔为在盖板6顶面设置的圆孔。第一压块24、第二压块32和第三压块26分别在盖板6的长度方向上的不同位置处对盖板6施加压力,使盖板6压紧可靠,提高稳定性,而且使得盖板6受力均匀,不容易变形,有助于提高产品焊接质量。
49.如图4至图7所示,焊接工装还包括设置于第三定位座10上且用于对控制臂本体7进行限位的限位块36,限位块36处于第三定位销14的轴向上,限位块36与第三定位销14为相对布置。在进行上件时,第三定位销14插入控制臂本体7的长度方向上的一端的轴孔中,限位块36位于控制臂本体7的该端轴孔的外部,限位块36与控制臂本体7的外壁面(该外壁面位于轴孔轴线相垂直的竖直平面)相接触,在水平方向上对控制臂本体7起到限位作用,确保控制臂本体7定位的准确性,同时第二上夹块28与第二下夹块29相配合,在控制臂本体7的长度方向上的另一端的轴孔位置处夹紧控制臂本体7。
50.如图1至图3所示,第一翻转支架404上设置两个焊接工装,该两个焊接工装处于与第一翻转支架404的长度方向相平行的同一直线上。第二翻转支架405上也设置两个焊接工装,该两个焊接工装处于与第二翻转支架405的长度方向相平行的同一直线上。焊接机器人1设置两个,两个焊接机器人1可以分别用于对处于第二工位的两个焊接工装上的控制臂本体7和盖板6进行焊接作业,而且两个焊接机器人1可以同时进行焊接作业,工作效率可以得到大大提高。将焊接机器人1设置在承载架上,可以减小焊房3的体积,进而可以减小焊接设备整体占地面积,而且考虑到主轴(即第一轴)承重较大,长期使用会容易损坏,若主轴中心存在误差,对产品焊接质量会产生影响,而焊接机器人1与焊接工装相对位置固定,这样对主轴中心精度要求不高,有助于确保产品的焊接质量稳定。
51.本发明还提供了一种汽车悬架下控制臂机器人焊接方法,采用上述结构的汽车悬架下控制臂机器人焊接设备,且包括如下的步骤:
52.s1、在第一工位处的焊接工装上进行上件工作;
53.s2、三轴水平旋转变位机4进行水平旋转,将装有工件的焊接工装旋转至第二工位处;
54.s3、焊接机器人1进行焊接工作,同时在第一工位处的焊接工装上再次进行上件工作;
55.s4、焊接完成后,三轴水平旋转变位机4再次进行水平旋转;
56.s5、在第一工位处进行取件工作,同时焊接机器人1进行焊接工作。
57.在上述步骤s1中,操作人员将汽车悬架下控制臂的各个组成部件安放在焊接工装上,操作人员将工件安装在处于第一工位处的焊接工装上,工件包括控制臂本体7和盖板6,由焊接工装对控制臂本体7和盖板6进行定位和夹紧固定。
58.在上述步骤s1中,在进行上件时,首先将控制臂本体7放置在支撑装置上,使第四定位销15插入控制臂本体7的一端的定位孔中,第三定位气缸18伸长,推动第三定位销14沿水平方向进行移动,使第三定位销14插入控制臂本体7一端的轴孔中,同时限位块36与控制臂本体7的外壁面相接触,通过第三定位销14和第四定位销15以及限位块36的配合,实现控制臂本体7的定位;然后将盖板6放置在控制臂本体7的顶面上,控制臂本体7和盖板6呈水平状态,第一定位气缸16和第二定位气缸17伸长,分别推动第一定位销12和第二定位销13向上移动,第一定位销12穿过控制臂本体7上的一通孔后插入盖板6上的一个定位孔中,第二定位销13穿过控制臂本体7上的另一通孔后插入盖板6上的另一个定位孔中,从而实现盖板6的定位;然后第一夹紧装置和第二夹紧装置进行动作,夹紧控制臂本体7,并对盖板6施加压力,使盖板6固定在控制臂本体7上。
59.在上述步骤s2中,上件工作完成后,三轴水平旋转变位机4开始运转,承载架水平旋转180度,使装有工件的焊接工装旋转至第二工位处,同时使原处于第二工位处的焊接工装旋转至第一工位处。
60.在上述步骤s3中,第一遮光板401处于下降状态,第二遮光板402处于遮挡状态,焊接机器人1进行焊接工作,将盖板6与控制臂本体7焊接在一起。
61.在上述步骤s3中,焊接机器人1在进行焊接工作的同时,操作人员可以在处于第一工位处的焊接工装上再次进行上件工作,操作人员将下一个需要焊接的汽车悬架下控制臂的各个组成部件安放在焊接工装上,具体上件操作过程与步骤s1相同。这样在焊接的同时可以进行上件,可以提高工作效率。
62.在上述步骤s4中,焊接工作完成后,制成汽车悬架下控制臂,三轴水平旋转变位机4的承载架再次水平旋转180度,使处于第二工位处的焊接工装旋转至第一工位处,准备进行取件工作,同时使装有工件的焊接工装旋转至第二工位处。
63.在上述步骤s5中,第一遮光板401切换至遮挡状态,第二遮光板402切换至下降状态,在第一工位处进行取件工作,操作人员将位于焊接工装上的汽车悬架下控制臂取下,同时焊接机器人1再次进行焊接工作,进行下一个汽车悬架下控制臂的焊接工作。
64.以上结合附图对本发明进行了示例性描述。显然,本发明具体实现并不受上述方式的限制。只要是采用了本发明的方法构思和技术方案进行的各种非实质性的改进;或未经改进,将本发明的上述构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1