一种抓取机构的制作方法
1.本实用新型属于生产辅助设备技术领域,特指一种抓取机构。
背景技术:
2.自改革开放以来,全球制造业向中国的大迁移造就了中国这一“制造大国”,也带动了自动化产品技术的广泛应用。自动化技术的普及让工厂自动化的程度不断得以提升,自动化制造取代了传统依赖人力制造的生产方式,工作效率大幅增加,降低了人为的不确定因素,使产品质量得以提升。在电动车轮毂的机械制造生产加工过程中,需要有焊接片的上料动作,现上料方式为人工,存在上料效率低下的问题。
技术实现要素:
3.本实用新型的目的是提供一种抓取机构,以解决上述背景技术中提出的问题。
4.本实用新型的目的是这样实现的:一种抓取机构,机架上设置有振动盘、与振动盘出口处相连接的振动盘接口、与振动盘接口相连接的定位冶具台以及位于定位冶具台旁侧的抓料装置,定位冶具台上相对设置有挡料装置和推料装置,定位冶具台上设置有至少一个定位销,定位销位于挡料装置和推料装置之间。
5.在上述的一种抓取机构中,所述挡料装置包括设置在定位冶具台上的第五气缸和传动设置在第五气缸上的挡料板,挡料板上设置有至少一个与定位销相配合的凹槽。
6.在上述的一种抓取机构中,所述第五气缸上设置有第一磁性开关。
7.在上述的一种抓取机构中,所述推料装置包括设置在定位冶具台上的第六气缸和传动设置在第六气缸上的推料滑块。
8.在上述的一种抓取机构中,所述第六气缸上设置有第二磁性开关。
9.在上述的一种抓取机构中,所述抓料装置包括横向设置的滑台、设置在滑台上的伺服电机、设置在滑台内并与伺服电机传动连接的丝杠以及与丝杠传动连接并沿滑台左右移动的安装板,安装板上设置有竖向滑轨,竖向滑轨内设置有第七气缸,竖向滑轨上滑动设置有与第七气缸传动连接的气动夹爪组件。
10.在上述的一种抓取机构中,所述气动夹爪组件包括支座,支座上滑动设置有滑动设置有左夹爪以及与左夹爪相对设置的右夹爪,所述支座内设置有与左夹爪和右夹爪传动连接的第八气缸,左夹爪和右夹爪在第八气缸的作用下配合抓料,所述左夹爪上移动设置有至少一个用于卸料的左推动销,所述右夹爪上移动设置有至少一个用于卸料的右推动销,左推动销和右推动销在第八气缸的作用下配合卸料。
11.在上述的一种抓取机构中,所述定位冶具台上设置有两个夹爪伸入孔和三个定位销,三个定位销位于两个夹爪伸入孔的同一旁侧并呈三角形设置。
12.在上述的一种抓取机构中,所述定位冶具台上设置有光纤传感器,光纤传感器设置在推料装置的旁侧。
13.在上述的一种抓取机构中,所述振动盘接口上设置有至少一根限位条;所述定位
冶具台上设置有压块,压块位于振动盘接口输出端的旁侧。
14.本实用新型相比现有技术突出且有益的技术效果是:本实用新型的抓取机构包括振动盘和定位冶具台,定位冶具台上设置有挡料装置、推料装置和定位销,定位冶具台的旁侧设置有抓料装置,具体操作中,工人只需将料(焊接片)放置在振动盘内并开启电源即可,料(焊接片)一个接一个地沿着振动盘接口到定位冶具台上,然后挡料装置的第五气缸带动挡料板往远离定位销的方向运动,使得挡料板的凹槽脱离定位销,接下来推料装置的第六气缸带动推料滑块推动其一侧的料(焊接片)往定位销靠近,直到料(焊接片)的一侧及中部凹槽抵靠定位销为止,此时料(焊接片)的抓取孔与定位冶具台上的夹爪伸入孔处于同一位置上,然后抓料装置的气动夹爪组件沿滑台和竖向滑轨移动到料(焊接片)所处的位置后抓取料(焊接片)并夹紧,最后气动夹爪组件沿滑台和竖向滑轨移动将料(焊接片)抓取到等分工装盘装置上,等待下一工序,这样一个工人可以同时应对多台机器设备,大大降低了人工成本,同时也降低了劳动强度,抓取精度高,速度快,时间省,效率高,控制方便,提高了自动化程度。
附图说明
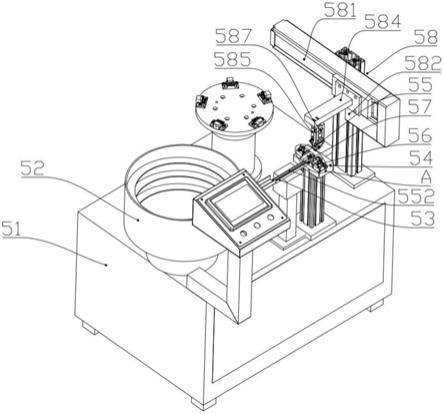
15.图1是本实用新型的结构示意图。
16.图2是本实用新型图1中a处的局部放大图。
17.图3是本实用新型气动夹爪组件设置在竖向滑轨上的结构示意图。
18.图中标号所表示的含义:
19.51
‑
机架;52
‑
振动盘;53
‑
振动盘接口;54
‑
定位冶具台;55
‑
挡料装置;
20.551
‑
第五气缸;552
‑
挡料板;553
‑
凹槽;554
‑
第一磁性开关;
21.56
‑
推料装置;561
‑
第六气缸;562
‑
推料滑块;563
‑
第二磁性开关;
22.57
‑
定位销;58
‑
抓料装置;581
‑
滑台;582
‑
伺服电机;
23.584
‑
安装板;585
‑
竖向滑轨;587
‑
气动夹爪组件;
24.5871
‑
支座;5872
‑
左夹爪;5873
‑
右夹爪;5875
‑
左推动销;
25.5876
‑
右推动销;59
‑
夹爪伸入孔;60
‑
光纤传感器;
26.61
‑
限位条;62
‑
压块。
具体实施方式
27.下面结合具体实施例对本实用新型作进一步描述:
28.一种抓取机构,参照图1
‑
3,包括机架51,机架51上设置有振动盘52、与振动盘52出口处相连接的振动盘接口53、与振动盘接口53相连接的定位冶具台54以及位于定位冶具台54旁侧的抓料装置58,所述振动盘接口53上设置有至少一根限位条61;所述定位冶具台54上设置有压块62,压块62位于振动盘接口53输出端的旁侧;定位冶具台54上相对设置有挡料装置55和推料装置56,定位冶具台54上设置有至少一个定位销57,定位销57位于挡料装置55和推料装置56之间,所述定位冶具台54上设置有两个夹爪伸入孔59和三个定位销57,三个定位销57位于两个夹爪伸入孔59的同一旁侧并呈三角形设置,所述定位冶具台54上设置有光纤传感器60,光纤传感器60设置在推料装置56的旁侧;所述挡料装置55包括设置在定位冶具台54上的第五气缸551和传动设置在第五气缸551上的挡料板552,挡料板552上设
置有至少一个与定位销57相配合的凹槽553,所述第五气缸551上设置有第一磁性开关554;所述推料装置56包括设置在定位冶具台54上的第六气缸561和传动设置在第六气缸561上的推料滑块562,所述第六气缸561上设置有第二磁性开关563;所述抓料装置58包括横向设置的滑台581、设置在滑台581上的伺服电机582、设置在滑台581内并与伺服电机582传动连接的丝杠以及与丝杠传动连接并沿滑台581左右移动的安装板584,安装板584上设置有竖向滑轨585,竖向滑轨585内设置有第七气缸,竖向滑轨585上滑动设置有与第七气缸传动连接的气动夹爪组件587,所述气动夹爪组件587包括支座5871,支座5871上滑动设置有左夹爪5872以及与左夹爪5872相对设置的右夹爪5873,所述支座5871内设置有与左夹爪5872和右夹爪5873传动连接的第八气缸5874,左夹爪5872和右夹爪5873在第八气缸5874的作用下配合抓料,所述左夹爪5872上移动设置有至少一个用于卸料的左推动销5875,所述右夹爪5873上移动设置有至少一个用于卸料的右推动销5876,左推动销5875和右推动销5876在第八气缸5874的作用下配合卸料。
29.本实用新型的抓取机构包括振动盘52和定位冶具台54,定位冶具台54上设置有挡料装置55、推料装置56和定位销57,定位冶具台54的旁侧设置有抓料装置58,具体操作中,工人只需将料(焊接片)放置在振动盘52内并开启电源即可,料(焊接片)一个接一个地沿着振动盘接口53到定位冶具台54上,然后挡料装置55的第五气缸551带动挡料板552往远离定位销的方向运动,使得挡料板552的凹槽553脱离定位销57,接下来推料装置56的第六气缸561带动推料滑块562推动其一侧的料(焊接片)往定位销57靠近,直到料(焊接片)的一侧及中部凹槽抵靠定位销57为止,此时料(焊接片)的抓取孔与定位冶具台54上的夹爪伸入孔59处于同一位置上,然后抓料装置58的气动夹爪组件587沿滑台581和竖向滑轨585移动到料(焊接片)所处的位置后抓取料(焊接片)并夹紧,最后气动夹爪组件587沿滑台581和竖向滑轨585移动将料(焊接片)抓取到等分工装盘装置上,等待下一工序,这样一个工人可以同时应对多台机器设备,大大降低了人工成本,同时也降低了劳动强度,抓取精度高,速度快,时间省,效率高,控制方便,提高了自动化程度。
30.上述实施例仅为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1