一种摩托车部件组装系统的制作方法
1.本实用新型涉及机械装配技术领域,尤其涉及一种摩托车部件组装系统。
背景技术:
2.摩托车是一种普遍受大众欢迎的交通工具,其具有灵活、快速等诸多优点,深受人们喜爱。摩托车一般由摩托车车架、分别安装在摩托车车架前后端的车轮、动力装置和安装在车架前端的扶手构成,如图1所示,摩托车车架3的前端设置有车架立管31,扶手和安装前轮的前车轮架分别通过轴承与车架立管装配在一起,轴承有两个分别压装在车架立管31两端,目前对于轴承的安装是由工人手工安装完成,劳动强度大,自动化程度低,装配效率低。
3.因此本领域技术人员致力于开发一种自动化程度高的摩托车部件组装系统。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本实用新型所要解决的技术问题是提供一种自动化程度高的摩托车部件组装系统。
5.为实现上述目的,本实用新型提供的一种摩托车部件组装系统,包括中央控制装置和与所述中央控制装置电连接的车架智能定位系统、轴承选取系统、组装装配装置和激光打标系统,所述中央控制装置设置有位移定位程序。
6.所述车架智能定位系统包括车架定位柱,所述中央控制装置电连接有车架搬运机器人、3d定位相机和2d定位相机,所述2d定位相机设置在所述车架定位柱的上方,所述3d定位相机设置在所述车架定位柱的旁边,所述中央控制装置内设置有位移定位程序。
7.所述组装装配装置包括一门形组装架,所述门形组装架的顶部设置有浮动压头,所述车架定位柱设置在所述浮动压头的正下方,所述浮动压头连接有驱使其上下移动的下压动力机构,所述门形组装架上安装有容置所述浮动压头的第一浮头暂存套。
8.所述轴承选取系统包括水平横向移动的第一滑板,所述第一滑板连接有驱使其移动的第三动力装置;所述第一滑板上安装有水平纵向移动的轴承下料板,所述轴承下料板连接有驱使其移动的第四动力装置,所述轴承下料板还连接有离合控制装置;所述轴承下料板的后端设置有垂直于所述轴承下料板表面的供料管,前端设置有容置轴承的空心暂存槽;所述轴承下料板的前端下方设置有可水平横向移动的第二滑板,所述第二滑板上安装有可上下移动且可穿过所述空心暂存槽底部并顶起轴承的轴承顶升块,所述第二滑板连接有驱使其移动的第五动力装置,所述轴承顶升块连接有驱使其移动的第六动力装置,所述第三动力装置、第四动力装置、离合控制装置、第五动力装置和第六动力装置均电连接所述中央控制装置;所述轴承选取系统还包括多自由度机械夹手和第一摄像头。
9.所述激光打标系统包括多自由度激光打标机器人,所述多自由度激光打标机器人的前端端部安装有激光打标机和打标定位摄像机。
10.所述第一滑板安装在一空心支架的顶部。所述第三动力装置为一步进电机。所述空心支架的上端安装有一与所述步进电机的转子连接的螺杆,所述螺杆螺纹连接有与所述
第一滑板固定连接的螺母。
11.所述第四动力装置为一安装在所述空心支架中部的第二气缸,所述轴承下料板的底部设置有离合孔,所述离合控制装置包括垂直走向的离合气缸,所述离合气缸的活塞杆可嵌入所述离合孔中,所述第二气缸的活塞杆通过一角铁与所述离合气缸的侧壁连接;所述第五动力装置为第三气缸,所述第三气缸的活塞杆与所述第二滑板的底部连接,所述第六动力装置为第四气缸,所述第四气缸的活塞杆与所述轴承顶升块的底部连接。
12.所述供料管的后端还设置有在竖直方向上连续的开口探测槽,所述供料管的后方设置有正对所述开口探测槽的传感器,所述传感器与所述中央控制装置电连接。
13.还包括设置在所述多自由度机械夹手一侧的浮动压头暂存装置,所述浮动压头暂存装置包括第一门型架和安装在所述第一门型架上且开口朝下的若干个第二浮头暂存套,所述第二浮头暂存套上安装有第一浮头锁紧气缸,所述第一浮头锁紧气缸的活塞贯穿所述第二浮头暂存套的侧壁。
14.所述浮动压头包括浮动头和套接在所述浮动头上端的固定柱,所述浮动头的中部设置有轴向向下延伸并径向向内逐渐收缩的轴承暂存套装圆台,所述浮动头的外侧壁与所述固定柱之间设置有径向活动腔,所述固定柱的轴心与所述浮动头之间设置有轴向活动组件。
15.所述轴向活动组件包括设置在所述固定柱中部的连接轴孔,所述连接轴孔内设置有与所述浮动头顶部固定连接的螺钉,所述螺钉上套接有纵向弹簧,所述纵向弹簧的两端被夹持在所述螺钉的螺头和所述连接轴孔的底部之间,正常状态下,所述螺钉的外侧壁与所述连接轴孔的内侧壁互不接触。
16.所述下压动力机构为贯穿安装在所述门形组装架顶部的下压电缸,所述第一浮头暂存套安装在所述下压电缸的活动螺杆上,所述第一浮头暂存套的侧壁安装有浮动压头锁紧气缸,所述浮动压头锁紧气缸的活塞贯穿所述第一浮头暂存套的侧壁。
17.所述2d定位相机安装在所述门形组装架的中部一侧并连接有驱使其横向移动的动力机构,所述2d定位相机可以移动至所述车架定位柱的正上方;所述动力机构包括套接固定在所述门形组装架一侧的连接座,所述连接座上固定安装有横向移动气缸,所述2d定位相机与所述横向移动气缸的活塞杆固定连接;所述连接座还连接有与所述横向移动气缸走向平行的横向移动滑轨,所述横向移动滑轨上设置有与所述横向移动气缸的活塞杆固定连接的横向移动滑块。
18.所述多自由度机械夹手包括底座,所述底座上安装有首尾依次铰接四轴机器人,所述四轴机器人的一端安装有气动夹爪。
19.所述摩托车车架浮动抓手包括一水平走向的连接主板,所述连接主板的顶部固定安装有轴向为z向的环形连接套,所述连接主板的底部安装有沿x向移动的第一抓手滑块和沿y向移动的第二抓手滑块,所述第一抓手滑块连接有微调其移动的第一弹力机构,所述第二抓手滑块连接有微调其移动的第二弹力机构,所述第一抓手滑块的底部和第二抓手滑块的底部均分别安装有夹爪。
20.所述连接主板的底部安装有沿x向设置且与所述第一抓手滑块匹配的第一抓手滑轨,所述连接主板的底部安装有沿y向设置且与所述第二抓手滑块匹配的第二抓手滑轨。
21.所述第一弹力机构包括安装在所述连接主板底部且分别位于所述第一抓手滑块
两端的两个第一限位板,所述第一抓手滑块的底部固定连接有位于两个所述第一限位板之间的第一微调块,所述第一微调块的两端分别与两个所述第一限位板之间连接有第一滑动轴,所述第一滑动轴上套接有抵在所述第一限位板和第一抓手滑块端部之间的第一弹簧,所述夹爪的顶部通过一连接板与所述第一微调块的底部固定连接。
22.所述第二弹力机构包括安装在所述连接主板底部且分别位于所述第二抓手滑块两端的两个第二限位板,所述第二抓手滑块的底部固定连接有位于两个所述第二限位板之间的第二微调块,所述第二微调块的两端分别与两个所述第二限位板之间连接有第二滑动轴,所述第二滑动轴上套接有抵在所述第二限位板和第二抓手滑块端部之间的第二弹簧,所述夹爪的顶部通过一连接板与所述第二微调块的底部固定连接。
23.所述第一抓手滑块和第一弹力机构设置有位于同侧的两组,所述第二抓手滑块和第二弹力机构设置有位于同侧的两组。
24.本实用新型的有益效果是:本实用新型的摩托车部件组装系统,包括中央控制装置和与中央控制装置电连接的车架智能定位系统、轴承选取系统、组装装配装置和激光打标系统,中央控制装置设置有位移定位程序,摩托车车架由中央控制装置通过车架智能定位系统负责移动,车架智能定位系统包括一个3d定位相机和一个2d定位相机,3d定位相机对摩托车车架进行三维立体定位,2d定位相机对摩托车车架进行平面精确定位,方便精准装配轴承,轴承选取系统提供匹配的轴承装在摩托车车架上车架立管的两端,结构简单,自动化程度高,组装效率高,经济效益好。
附图说明
25.图1是背景技术中摩托车车架的结构示意图;
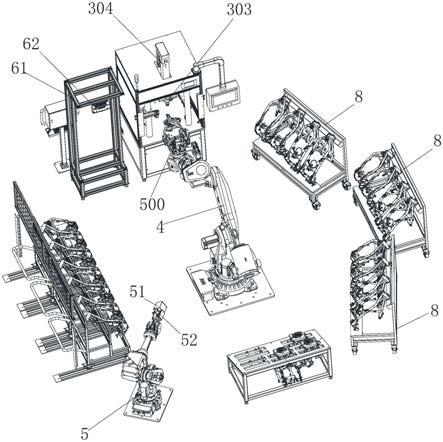
26.图2是本实用新型的结构示意图;
27.图3是本实用新型的局部结构示意图之一;
28.图4是本实用新型的局部结构示意图之二;
29.图5是本实用新型的轴承选取系统的结构示意图之一;
30.图6是本实用新型的轴承选取系统的结构示意图之二;
31.图7是本实用新型浮动压头暂存装置的结构示意图;
32.图8是本实用新型摩托车车架浮动抓手的结构示意图之一;
33.图9是本实用新型摩托车车架浮动抓手的结构示意图之一;
34.图10是本实用新型浮动压头的结构示意图;
35.图11是本实用新型浮动压头的结构俯视图;
36.图12是图11中a-a处结构剖视图;
37.图13是本实用新型浮动压头的结构分解示意图;
38.图14是本实用新型浮动压头在装配轴承时的结构示意图。
具体实施方式
39.下面结合附图和实施例对本实用新型作进一步说明,需注意的是,在本实用新型的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指
的装置或元件必须具有特定的方位、以特定的方式构造和操作,因此不能理解为对本实用新型的限制。术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
40.如图2至图14所示,一种摩托车部件组装系统,包括中央控制装置和与所述中央控制装置电连接的车架智能定位系统、轴承选取系统、组装装配装置和激光打标系统,所述中央控制装置设置有位移定位程序;摩托车车架由中央控制装置通过车架智能定位系统负责移动,轴承选取系统提供匹配的轴承装在摩托车车架上车架立管的两端,结构简单,自动化程度高,组装效率高,经济效益好。
41.所述车架智能定位系统包括车架定位柱302,所述中央控制装置电连接有车架搬运机器人4、3d定位相机62和2d定位相机75,所述2d定位相机75设置在所述车架定位柱302的上方,所述3d定位相机62设置在所述车架定位柱302的旁边,所述中央控制装置内设置有位移定位程序。
42.所述组装装配装置包括一门形组装架301,所述门形组装架301的顶部设置有浮动压头600,所述车架定位柱302设置在所述浮动压头600的正下方,所述浮动压头600连接有驱使其上下移动的下压动力机构,所述门形组装架301上安装有容置所述浮动压头600的第一浮头暂存套303;
43.所述激光打标系统包括多自由度激光打标机器人5,所述多自由度激光打标机器人5的前端端部安装有激光打标机51和打标定位摄像机52。
44.所述轴承选取系统包括水平横向移动的第一滑板201,所述第一滑板201连接有驱使其移动的第三动力装置;所述第一滑板201上安装有水平纵向移动的轴承下料板202,所述轴承下料板202连接有驱使其移动的第四动力装置,所述轴承下料板202还连接有离合控制装置;所述轴承下料板202的后端设置有垂直于所述轴承下料板202表面的供料管203,前端设置有容置轴承的空心暂存槽204;所述轴承下料板202的前端下方设置有可水平横向移动的第二滑板205,所述第二滑板205上安装有可上下移动且可穿过所述空心暂存槽204底部并顶起轴承的轴承顶升块206,所述第二滑板205连接有驱使其移动的第五动力装置,所述轴承顶升块206连接有驱使其移动的第六动力装置,所述第三动力装置、第四动力装置、离合控制装置、第五动力装置和第六动力装置均电连接所述中央控制装置;所述轴承选取系统还包括多自由度机械夹手400和第一摄像头74,所述中央控制装置内设置有轴承视觉比对程序,。
45.在本实施例中,所述第一滑板201安装在一空心支架207的顶部,所述第三动力装置为一步进电机208,所述空心支架207的上端安装有一与所述步进电机208的转子连接的螺杆209,所述螺杆209螺纹连接有与所述第一滑板201固定连接的螺母;所述第四动力装置为一安装在所述空心支架207中部的第二气缸210,所述轴承下料板202的底部设置有离合孔,所述离合控制装置包括垂直走向的离合气缸211,所述离合气缸211的活塞杆可嵌入所述离合孔中,所述第二气缸210的活塞杆通过一角铁212与所述离合气缸211的侧壁连接;所述第五动力装置为第三气缸213,所述第三气缸213的活塞杆与所述第二滑板205的底部连接,所述第六动力装置为第四气缸214,所述第四气缸214的活塞杆与所述轴承顶升块206的底部连接;所述供料管203的后端还设置有在竖直方向上连续的开口探测槽215,所述供料管203的后方设置有正对所述开口探测槽215的传感器216,所述传感器216与所述中央控制
装置电连接。
46.上述轴承选取系统的工作原理是:
47.供料管203和传感器216设置有多组,不同的供料管203分别放置不同的轴承,当需要装配时,电脑依据程序选取需要装配的轴承,步进电机208带动第一滑板201及相应的供料管203横向移动至离合气缸211的正上方,然后离合气缸211的活塞杆插入轴承下料板202的底部的离合孔中,接着第二气缸210工作,通过角铁212和离合气缸211带动轴承下料板202向后移动,使得空心暂存槽204移动至供料管203的正下方,此时由于重力作用,供料管203中位于最底部的轴承落入空心暂存槽204中,然后第二气缸210推动轴承下料板202前移,使得空心暂存槽204移动至轴承顶升块206的正下方,随后轴承顶升块206向上升起将选取的轴承顶出空心暂存槽204表面,然后由多自由度机械夹手400抓取选取的轴承并移动至第一摄像头74下进行摄像比对,如果判断为不合格品则放置在一旁的容置盒77中回收;如果判断为需要的完好品则将轴承移动至下一环节备用。
48.还包括设置在所述多自由度机械夹手400一侧的浮动压头暂存装置,所述浮动压头暂存装置包括第一门型架101和安装在所述第一门型架101上且开口朝下的若干个第二浮头暂存套102,所述第二浮头暂存套102上安装有第一浮头锁紧气缸103,所述第一浮头锁紧气缸103的活塞贯穿所述第二浮头暂存套102的侧壁。
49.所述浮动压头600包括浮动头602和套接在所述浮动头602上端的固定柱601,所述浮动头602的中部设置有轴向向下延伸并径向向内逐渐收缩的轴承暂存套装圆台603,所述浮动头602的外侧壁与所述固定柱601之间设置有径向活动腔604,所述固定柱601的轴心与所述浮动头602之间设置有轴向活动组件。
50.所述轴向活动组件包括设置在所述固定柱601中部的连接轴孔605,所述连接轴孔605内设置有与所述浮动头602顶部固定连接的螺钉606,所述螺钉606上套接有纵向弹簧607,所述纵向弹簧607的两端被夹持在所述螺钉606的螺头和所述连接轴孔605的底部之间,正常状态下,所述螺钉606的外侧壁与所述连接轴孔605的内侧壁互不接触。
51.所述下压动力机构为贯穿安装在所述门形组装架301顶部的下压电缸304,所述第一浮头暂存套303安装在所述下压电缸304的活动螺杆上,所述第一浮头暂存套303的侧壁安装有浮动压头锁紧气缸305,所述浮动压头锁紧气缸305的活塞贯穿所述第一浮头暂存套303的侧壁。
52.所述2d定位相机75安装在所述门形组装架301的中部一侧并连接有驱使其横向移动的动力机构,所述2d定位相机75可以移动至所述车架定位柱302的正上方;所述动力机构包括套接固定在所述门形组装架301一侧的连接座309,所述连接座309上固定安装有横向移动气缸307,所述2d定位相机75与所述横向移动气缸307的活塞杆固定连接;所述连接座309还连接有与所述横向移动气缸307走向平行的横向移动滑轨306,所述横向移动滑轨306上设置有与所述横向移动气缸307的活塞杆固定连接的横向移动滑块308;车架搬运机器人抓起摩托车车架并将其移动至3d定位相机下进行拍摄定位三维立体位置,位移定位程序自动计算拍摄的坐标位置与标定坐标位置的差值,车架搬运机器人接收差值数据后自动补偿尺寸将摩托车车架放置在车架定位柱上,然后移动2d定位相机至车架定位柱上方进行二次水平精准测量,程序算出与标定坐标的差值,机器人再次补偿水平方向数据,摩托车车架作二次精准定位。
53.所述多自由度机械夹手400包括底座401,所述底座401上安装有首尾依次铰接四轴机器人402,所述四轴机器人402的一端安装有气动夹爪403,所述第一摄像头74固定安装在一支架76上。
54.所述摩托车车架浮动抓手500包括一水平走向的连接主板501,所述连接主板501的顶部固定安装有轴向为z向的环形连接套502,所述连接主板501的底部安装有沿x向移动的第一抓手滑块503和沿y向移动的第二抓手滑块504,所述第一抓手滑块503连接有微调其移动的第一弹力机构,所述第二抓手滑块504连接有微调其移动的第二弹力机构,所述第一抓手滑块503的底部和第二抓手滑块504的底部均分别安装有夹爪505;
55.所述连接主板501的底部安装有沿x向设置且与所述第一抓手滑块503匹配的第一抓手滑轨506,所述连接主板501的底部安装有沿y向设置且与所述第二抓手滑块504匹配的第二抓手滑轨507;
56.所述第一弹力机构包括安装在所述连接主板501底部且分别位于所述第一抓手滑块503两端的两个第一限位板508,所述第一抓手滑块503的底部固定连接有位于两个所述第一限位板508之间的第一微调块509,所述第一微调块509的两端分别与两个所述第一限位板508之间连接有第一滑动轴510,所述第一滑动轴510上套接有抵在所述第一限位板508和第一抓手滑块503端部之间的第一弹簧511,所述夹爪505的顶部通过一连接板512与所述第一微调块509的底部固定连接;所述第二弹力机构包括安装在所述连接主板501底部且分别位于所述第二抓手滑块504两端的两个第二限位板513,所述第二抓手滑块504的底部固定连接有位于两个所述第二限位板513之间的第二微调块514,所述第二微调块514的两端分别与两个所述第二限位板513之间连接有第二滑动轴515,所述第二滑动轴515上套接有抵在所述第二限位板513和第二抓手滑块504端部之间的第二弹簧516,所述夹爪505的顶部通过一连接板512与所述第二微调块514的底部固定连接;所述第一抓手滑块503和第一弹力机构设置有位于同侧的两组,所述第二抓手滑块504和第二弹力机构设置有位于同侧的两组。
57.上述摩托车车架浮动抓手500的工作原理是:
58.四个夹爪5抓取摩托车车架,由于第一滑块、第一弹力机构和第二滑块、第二弹力机构分别控制两个夹爪沿x向和y向微调,所以可以夹起因焊接形变的摩托车车架。
59.本实施例还一种采用上述摩托车部件组装系统的组装方法,包括以下步骤:
60.s1.向所述中央控制装置输入装配指令,所述中央控制装置选取需要装配的摩托车车架3、轴承2和浮动压头600,所述多自由度机械夹手400抓取设定好的浮动压头600嵌入第一浮头暂存套303中,然后在抓取设定好的轴承2套在浮动压头600的下端上;
61.s2. 所述车架搬运机器人4抓起摩托车车架3并将其移动至3d定位相机62下进行拍摄定位三维立体位置,位移定位程序自动计算拍摄的坐标位置与标定坐标位置的差值,所述车架搬运机器人4接收差值数据后自动补偿尺寸将摩托车车架3的前端的车架立管31的一端放置在车架定位柱302上,然后移动2d定位相机75至车架定位柱上方进行二次水平精准测量,程序算出与标定坐标的差值,车架搬运机器人4再次补偿水平方向数据,摩托车车架作二次精准定位;
62.s3.所述第一浮头暂存套303下移,将轴承2压入并固定在所述头部轴套31的一端中,然后第一浮头暂存套303上移,所述多自由度机械夹手400在抓取设定好的另一个轴承2
套在浮动压头600的下端上;
63.s4.所述车架搬运机器人4取下并翻转摩托车车架3,将车架立管31的另一端放置在车架定位柱302上,然后移动2d定位相机75至车架定位柱上方进行二次水平精准测量,程序算出与标定坐标的差值,车架搬运机器人4再次补偿水平方向数据,摩托车车架作再次精准定位;
64.s5.所述第一浮头暂存套303下移,将另一个轴承2压入并固定在所述头部轴套31的另一端中;
65.s6.装配完轴承后,所述车架搬运机器人4将摩托车车架3移动至打标定位摄像机52下进行拍照定位,然后由所述激光打标机51对相应部位进行激光打标,至此装配完成,装配好的摩托车车架3放置在其中一个车架暂存架8上。
66.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1