一种焊接机器人的制作方法
1.本实用新型涉及机器人技术领域,具体为一种焊接机器人。
背景技术:
2.机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗、机器猫等),狭义上对机器人的定义还有很多分类和争议,有些电脑程序甚至也被称为机器人,在现代工业中,机器人指能够自动执行任务的人造机器装置,用于取代或者协助人类工作,理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正向此方研究开发,焊接机器人是指从事焊接的工业机器人,是可以接受人类指挥,也可以按照预先编排的程序运行,在现代化生产过程中,焊接机器人发挥着巨大的作用,极大的提升了生产效率。
3.经检索公告号cn 212552381 u公开了公开了一种新型焊接机器人,包括底座,所述底座的顶部外表面设置有旋转平台,所述旋转平台的顶部外表面固定安装有卡口筒,所述卡口筒的上方设置有滑动筒,所述滑动筒的顶部外表面活动安装有第一机械臂,所述第一机械臂的顶端活动安装有第二机械臂,所述第二机械臂的一端固定安装有安装座,所述安装座的一侧设置有夹具,所述夹具上卡装有焊条。虽然该实用新型所述的一种新型焊接机器人,设有卡口筒、滑动筒、缓震液、滑动环、密封环、隔热环与阻燃环,能够解决振动力影响焊接精准度的问题,在焊接过程中,阻燃环能够为第二机械臂提供阻燃保护,隔热环能够为第二机械臂提供隔热保护,带来更好的使用前景。
4.但是经本发明人探索发现相关技术方案仍然存在至少以下缺陷:
5.相关技术方案中仅仅设置一个隔热环以及阻燃环用于隔热的效果,但是如果焊接机器人长时间焊接工作必然导致机械臂会被传递大量的热量,对机械臂的内部管路造成热损害问题。
技术实现要素:
6.本实用新型的目的在于提供一种焊接机器人,解决了背景技术中所提出相关技术方案中仅仅设置一个隔热环以及阻燃环用于隔热的效果,但是如果焊接机器人长时间焊接工作必然导致机械臂会被传递大量的热量,对机械臂的内部管路造成热损害问题的问题。
7.为实现上述目的,本实用新型提供如下技术方案:一种焊接机器人,包括第一机械臂和第二机械臂;
8.其中,第二机械臂的安装在所述第一机械臂的上部,且第二机械臂的一端固定有连接臂,连接臂远离所述第二机械臂的一端安装有焊枪;
9.所述连接臂靠近所述第二机械臂的一端开设有水平设置的矩形通口,所述连接臂中部固定嵌入有导风管,导风管远离所述矩形通口的一端固定连接在散热管的中部,且散热管的两端分别贯穿于连接臂外侧壁;
10.所述矩形通口内安装有伺服电机,伺服电机的驱动端固定有吹风叶轮,吹风叶轮
设置在所述导风管的端口处。
11.作为本实用新型的一种优选实施方式,所述散热管与连接臂之间的缝隙处设置有导热硅脂。
12.作为本实用新型的一种优选实施方式,所述连接臂外部套接有网筒,网筒端部内壁开设有紧固螺纹,网筒螺纹拧合在所述连接臂的外壁。
13.作为本实用新型的一种优选实施方式,所述网筒为40目的不锈钢网筒。
14.作为本实用新型的一种优选实施方式,所述导热管和导风管均为不锈钢管。
15.与现有技术相比,本实用新型的有益效果如下:
16.本实用新型在焊枪固定的连接臂上安装有伺服电机工作带动吹风叶轮旋转产生风源通过导风管对散热管进行吹风降温,散热管可以通过导热硅脂将焊枪处进行及时降温散热,避免焊枪产生的高温导致连接臂发生变形以及高温机械臂发生高温故障问题。
附图说明
17.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
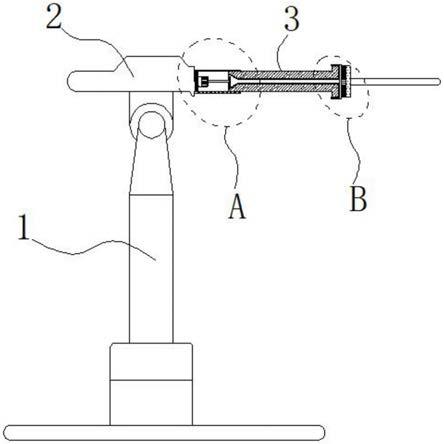
18.图1为本实用新型一种焊接机器人的主视图;
19.图2为本实用新型一种焊接机器人的a处放大结构示意图;
20.图3为本实用新型一种焊接机器人的图1的b处放大结构示意图;
21.图4为本实用新型一种焊接机器人的伺服电机在矩形通口内分布位置结构示意图;
22.图5为本实用新型一种焊接机器人的网筒结构示意图。
23.图中:1、第一机械臂;2、第二机械臂;3、连接臂;4、网筒;5、伺服电机;6、矩形通口;7、吹风叶轮;8、导风管;9、散热管;10、焊枪;11、导热硅脂。
具体实施方式
24.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
25.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
26.请参阅图1-5,本实用新型提供一种技术方案:一种焊接机器人,包括第一机械臂1和第二机械臂2;其中,第二机械臂2的安装在第一机械臂1的上部,且第二机械臂2的一端固定有连接臂3,连接臂3远离第二机械臂2的一端安装有焊枪10,焊枪10用于正常的焊接工作。
27.请参阅图2和3,位于连接臂3靠近第二机械臂2的一端开设有竖直设置的矩形通口6,矩形通口6用于安装伺服电机10,位于连接臂3中部固定嵌入有导风管8,导风管8远离矩形通口6的一端固定连接在散热管9的中部,且散热管9的两端分别贯穿于连接臂3外侧壁,导风管8与散热管9配合后将连接臂3上的热量及时排除;位于矩形通口6内安装有伺服电机
5,伺服电机5的驱动端固定有吹风叶轮7,吹风叶轮7设置在导风管8的端口处,吹风叶轮7吹风通过导风管8对散热管9进行及时散热降温。
28.请参阅图2、3和4,在具体实施方式中,散热管9与连接臂3之间的缝隙处设置有导热硅脂11,导热硅脂11可以保证与连接臂3靠近焊枪10的端部产生的高温及时传递到散热管9上,形成良好的散热效果;连接臂3外部套接有网筒4,网筒4端部内壁开设有紧固螺纹,网筒4螺纹拧合在连接臂3的外壁,网筒4在拧合固定在连接臂3上时,可以对伺服电机5进行防护。
29.进一步的,网筒4为40目的不锈钢网筒,不锈钢网筒具有长使用寿命的效果;导热管9和导风管8均为不锈钢管,导热散热效果均较好,并且质量较轻,降低机器人机械臂的负担。
30.需要说明的是,本实用新型为一种焊接机器人,各个件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
31.工作原理:伺服电机5工作带动吹风叶轮7旋转产生风源通过导风管8对散热管9进行吹风降温,散热管9可以通过导热硅脂11将焊枪10处进行及时降温散热,避免焊枪10产生的高温导致连接臂3发生变形情况,后期需要对伺服电机5检修维护时,逆时针旋转网筒4从连接臂3上移动位置,直至矩形通口6外露,就可以进行检修伺服电机5了,同时网筒4可以在伺服电机5工作时起到过滤的作用。
32.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
33.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1