一种磨刀板的自动供应装置的制作方法
1.本实用新型涉及半导体晶圆切割设备,特别是涉及一种磨刀板的自动供应装置。
背景技术:
2.晶圆切环机台(ring cut)是半导体制造领域常用的加工设备,主要通过切割刀对晶圆进行切割,除了切割过程,机台作业时还包括磨刀过程,即通过磨刀板对切割刀进行打磨,待磨刀完成后再对晶圆进行切割,以保证切割刀的锋利度。
3.现有的磨刀板通常包括如下步骤:机台报警后,磨刀板安装平台会自动移动到更换位置,关闭真空移走旧磨刀板;清理安放平台,将磨刀板正确放置在安装平台;开启真空使磨刀板平稳吸附在安装平台。以上更换步骤均需人力完成,对于某些制程,可能需要多次更换磨刀板,同时对安装位置也有较为精准的要求,放置时通常要对磨刀板的位置进行多次调整以保证其位置准确,这对于工程师的精力与耐心都具有一定的考验,且耗时较长,影响机台作业效率。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本实用新型提供一种磨刀板的自动供应装置,所述自动供应装置包括竖直固定于立板上的滑轨,至少4个依次连接的机械臂安装于所述滑轨上并能够沿滑轨上下运动,相邻的所述机械臂之间通过齿轮连接以实现相对旋转,位于末端的机械臂底部固定有吸附组件,所述吸附组件包括呈阵列排布的多个吸盘,所述吸盘连接有真空管路从而实现对磨刀板的吸附。
5.优选地,所述立板上还固定有磨刀板供应盒。
6.优选地,所述磨刀板供应盒能够放置20-100块磨刀板。
7.优选地,磨刀板安装平台位于所述机械臂的下方,所述磨刀板供应盒及磨刀板安装平台均为水平设置。
8.优选地,所述磨刀板安装平台与所述滑轨的连线垂直于所述立板。
9.优选地,所述磨刀板安装平台安装于晶圆放置平台的侧面。
10.优选地,所述滑轨的两端放置有限位块,以防止所述机械臂滑脱。
11.优选地,所述机械臂通过电机驱动齿轮旋转。
12.优选地,相邻所述机械臂之间能够相对旋转的角度为90-270
°
。
13.优选地,所述滑轨的行程范围大于50mm。
14.如上所述,本实用新型提供一种磨刀板的自动供应装置,该自动供应装置包含竖直设置的滑轨及多个机械臂,整个自动供应装置仅采用一条滑轨,多个机械臂之间通过齿轮连接以实现相对旋转,机械臂之间仅通过旋转运动实现对磨刀板的吸附抓取,整个过程无需伸缩运动以最大限度地减少运动空间,从而很好地适应狭窄空间,呈阵列排布的多个吸盘能够提升对磨刀板吸附时的稳定性及水平度。通过示教对吸附组件的吸附抓取点位及放置点位进行精确定位,避免了人工放置时多次调整的过程,同时节省大量操作时间,对机
台作业效率有明显提升。
附图说明
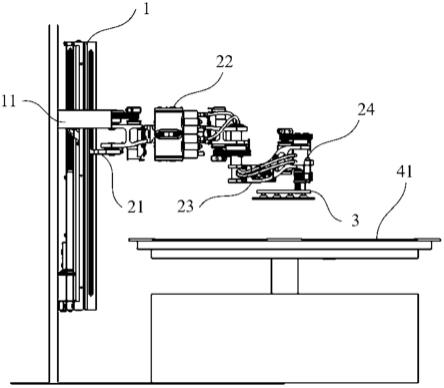
15.图1显示为本实用新型中自动供应装置的侧视结构示意图。
16.图2显示为本实用新型中自动供应装置的俯视结构示意图。
17.图3显示为本实用新型中自动供应装置的立体结构示意图。
18.图4显示为本实用新型中自动供应装置的立体结构示意图。
19.元件标号说明
[0020]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
滑轨
[0021]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
吸附组件
[0022]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
磨刀板供应盒
[0023]
21
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机械臂
[0024]
22
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机械臂
[0025]
23
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机械臂
[0026]
24
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机械臂
[0027]
41
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
晶圆放置平台
[0028]
42
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
磨刀板安装平台
具体实施方式
[0029]
以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
[0030]
如在详述本实用新型实施例时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本实用新型保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
[0031]
为了方便描述,此处可能使用诸如“之下”、“下方”、“低于”、“下面”、“上方”、“上”等的空间关系词语来描述附图中所示的一个元件或特征与其他元件或特征的关系。将理解到,这些空间关系词语意图包含使用中或操作中的器件的、除了附图中描绘的方向之外的其他方向。此外,当一层被称为在两层“之间”时,它可以是所述两层之间仅有的层,或者也可以存在一个或多个介于其间的层。本文使用的“介于
……
之间”表示包括两端点值。
[0032]
在本技术的上下文中,所描述的第一特征在第二特征“之上”的结构可以包括第一和第二特征形成为直接接触的实施例,也可以包括另外的特征形成在第一和第二特征之间的实施例,这样第一和第二特征可能不是直接接触。
[0033]
需要说明的是,本实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,遂图示中仅显示与本实用新型中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,其组件布局型态也可能更为复杂。
[0034]
基于上述人工更换磨刀板存在的问题,采用自动机器人更换磨刀板是一种可行的
方案,但是市面上现有的装配机械手臂通常需要较大的工作空间,难以在现有机台的狭小空间中适用。
[0035]
如图1-4所示,本实施例提供一种磨刀板的自动供应装置,所述自动供应装置包括竖直固定于立板上的滑轨1,至少4个依次连接的机械臂安装于所述滑轨1上并能够沿滑轨1上下运动,相邻的所述机械臂之间通过齿轮连接以实现相对旋转,位于末端的机械臂底部固定有吸附组件3以吸附磨刀板。
[0036]
进一步地,所述吸附组件3包括呈阵列排布的多个吸盘,所述吸盘连接有真空管路从而实现对磨刀板的吸附。多个吸盘的阵列排布能够最大程度的提高对磨刀板吸附时的稳定性及水平度。多个机械臂通过齿轮连接能够提高抓取或放置磨刀板时的活动自由度,实现较大角度的翻折等操作,以适应在狭小空间内运行。作为示例,所述自动供应装置包括4个机械臂,即机械臂21、机械臂22、机械臂23及机械臂24,其中机械臂21安装于所述滑轨1上并能够沿滑轨1上下运动,位于末端的机械臂24底部固定吸附组件3。
[0037]
进一步地,所述立板上还固定有磨刀板供应盒11,所述磨刀板供应盒11能够放置20-100块磨刀板。
[0038]
进一步地,磨刀板安装平台42位于所述机械臂的下方。所述磨刀板供应盒11及磨刀板安装平台42均为水平设置。
[0039]
进一步地,所述磨刀板安装平台与滑轨1的连线垂直于所述立板,从而尽可能地缩短距离,减少机械臂的运动行程。
[0040]
进一步地,所述磨刀板安装平台42安装于晶圆放置平台41的侧面。
[0041]
进一步地,所述滑轨1的两端放置有限位块,以防止所述机械臂滑脱。
[0042]
进一步地,所述机械臂通过电机驱动齿轮旋转。
[0043]
进一步地,相邻所述机械臂之间能够相对旋转的角度为90-270
°
。
[0044]
该自动供应装置的工作过程大致为,先通过示教确定吸附组件3在所述磨刀板供应盒11中的吸附抓取点位以及在所述磨刀板安装平台42中的放置点位,抓取点位与磨刀板供应盒11的位置相对应,放置点位与磨刀板安装平台42的位置相对应。工作时通过控制系统完成磨刀板供应的各个过程;所述吸附组件3先到达磨刀板供应盒的位置,真空管路开启吸附磨刀板,然后吸附组件3再运动至磨刀板安装平台处,真空管路关闭并将磨刀板放至预定位置。每取放1块磨刀板,机械臂沿滑轨1下降相应高度,以确保每次位置移动到位。
[0045]
综上所述,本实用新型提供一种磨刀板的自动供应装置,该自动供应装置包含竖直设置的滑轨及多个机械臂,整个自动供应装置仅采用一条滑轨,多个机械臂之间通过齿轮连接以实现相对旋转,机械臂之间仅通过旋转运动即可实现对磨刀板的吸附抓取,整个过程无需伸缩运动以最大限度地减少运动空间,从而很好地适应狭窄空间,呈阵列排布的多个吸盘能够提升对磨刀板吸附时的稳定性及水平度。通过示教对吸附组件的吸附抓取点位及放置点位进行精确定位,避免了人工放置时多次调整的过程,同时节省大量操作时间,对机台作业效率有明显提升。
[0046]
上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1