一种基于人工智能的无人驾驶汽车轮胎监测方法与流程
1.本发明涉及基于人工智能的无人驾驶技术领域,具体涉及一种基于人工智能的无人驾驶汽车轮胎监测方法。
背景技术:
2.随着人工智能技术的快速发展,无人驾驶汽车的使用现象越来越普遍。无人驾驶汽车作为一种智能汽车,主要依靠车内的计算机系统为主的智能驾驶仪来实现无人驾驶。而在实际的无人驾驶过程中,比如无人驾驶汽车的轮胎部件在长期高速行驶时,会导致无人驾驶汽车轮胎温度上升,轮胎的气压随之升高,轮胎变形,胎体弹性降低,无人驾驶汽车所受到的动负荷增大,容易导致轮胎内裂甚至爆胎。而现有的无人驾驶汽车无法实现对轮胎正常运行状况进行预估,并及时给出预警提示。
技术实现要素:
3.本发明提供一种基于人工智能的无人驾驶汽车轮胎监测方法。
4.本发明通过下述技术方案实现:
5.一种基于人工智能的无人驾驶汽车轮胎监测方法,包括以下步骤:
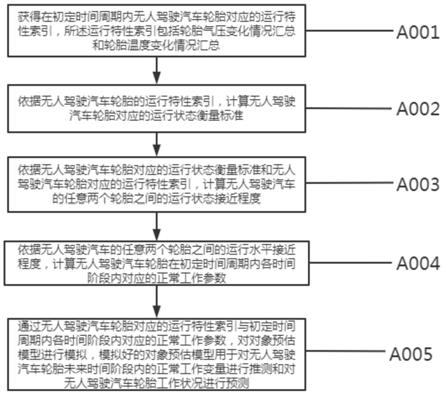
6.a001:获得在初定时间周期内无人驾驶汽车轮胎对应的运行特性序列,所述运行特性序列包括轮胎气压变化序列和轮胎温度变化序列;
7.a002:依据无人驾驶汽车轮胎的运行特性序列,计算无人驾驶汽车轮胎对应的运行状态衡量标准;
8.a003:依据无人驾驶汽车轮胎对应的运行状态衡量标准和无人驾驶汽车轮胎对应的运行特性序列,计算无人驾驶汽车的任意两个轮胎之间的运行状态接近程度;
9.a004:依据无人驾驶汽车的任意两个轮胎之间的运行水平接近程度,计算无人驾驶汽车轮胎在初定时间周期内各时间阶段内对应的正常工作参数;
10.a005:通过无人驾驶汽车轮胎对应的运行特性序列与初定时间周期内各时间阶段内对应的正常工作参数,对对象预估模型进行模拟,模拟好的对象预估模型用于对无人驾驶汽车轮胎未来时间阶段内的正常工作变量进行推测和对无人驾驶汽车轮胎工作状况进行预测。
11.可选地,步骤a001中,无人驾驶汽车轮胎中设有监测系统,所述监测系统包括控制装置,与控制装置连接的温度传感器和轮胎胎压传感器,温度传感器用于检测无人驾驶汽车的轮胎温度,轮胎胎压传感器用于检测无人驾驶汽车的轮胎压力,控制装置将接收到的温度传感器和轮胎胎压传感器的检测数据发送给所述监测系统中。
12.可选地,步骤a001中,获得在初定时间周期内无人驾驶汽车轮胎对应的运行特性序列的具体方法为:
13.a0010:采用轮胎胎压传感器测量无人驾驶汽车轮胎的压力值,获得无人驾驶汽车轮胎在某一时间周期内对应的压力数值,根据无人驾驶汽车轮胎在某一时间周期内的压力
数值,获得无人驾驶汽车轮胎对应的轮胎气压变化序列;
14.a0011:采用温度传感器测量无人驾驶汽车轮胎的温度值,获得无人驾驶汽车轮胎在某一时间周期内对应的温度值,根据无人驾驶汽车在某一时间周期内的温度值获得无人驾驶汽车轮胎对应的轮胎温度变化序列。
15.可选地,所述无人驾驶汽车轮胎的轮胎气压变化序列中所包含数据量与轮胎温度变化序列中所包含的数据量相等。
16.可选地,步骤a002中,依据无人驾驶汽车轮胎的运行特性序列,计算无人驾驶汽车轮胎对应的运行状态衡量标准;其中,计算无人驾驶汽车轮胎对应的运行状态衡量标准的公式为:
17.xc={avg(tc)*avg(mc)}/{(max(mc))-(min(mc))*(max(tc))min(tc)}
18.其中,xc为无人驾驶汽车轮胎c对应的运行状态衡量标准,tc为无人驾驶汽车轮胎c对应的轮胎温度变化序列,mc为无人驾驶汽车轮胎c对应的轮胎气压变化序列,avg()为平均值,max()为最大值,min()为最小值。
19.可选地,步骤a003中,依据无人驾驶汽车轮胎对应的运行状态衡量标准和无人驾驶汽车轮胎对应的运行特性序列,计算无人驾驶汽车的任意两个轮胎之间的运行水平接近程度的公式为:
[0020][0021]
其中,dtw为动态时间调整函数,q
y,z
为无人驾驶汽车轮胎c和无人驾驶汽车轮胎z之间的运行水平接近程度;s
c,z
为无人驾驶汽车轮胎c对应的轮胎气压变化序列和无人驾驶汽车轮胎z对应的轮胎气压变化序列之间的余弦相似度;xc为无人驾驶汽车轮胎c对应的运行状态衡量标准,xz为无人驾驶汽车轮胎z对应的运行状态衡量标准;tc为无人驾驶汽车轮胎c对应的轮胎温度变化序列,tz为无人驾驶汽车轮胎z对应的轮胎温度变化序列,e为自然常数。
[0022]
可选地,步骤a004中,根据无人驾驶汽车的任意两个轮胎之间的运行状态衡量标准,计算两个无人驾驶汽车轮胎之间的运行状态衡量标准差值,将所述运行状态衡量标准差值作为无人驾驶汽车的任意两个轮胎之间的差距,对无人驾驶汽车轮胎标记相应的运行状况,获得不同运行状况相应的无人驾驶汽车轮胎。
[0023]
可选地,步骤a005中,通过无人驾驶汽车各轮胎对应的运行特性序列与初定时间周期内各时间阶段内对应的正常工作参数对对象预估模型,获得模拟好的对象预估模型,具体模拟过程为:将某一个无人驾驶汽车轮胎在五分钟内的轮胎温度变化序列、轮胎气压变化序列和正常工作参数序列发送至对象预估模型中,对象预估模型能模拟到无人驾驶汽车轮胎在未来时间阶段内的正常工作参数。
[0024]
可选地,步骤a005中,无人驾驶汽车轮胎相应的运行特性序列和正常工作参数序列为一次模拟集合,一次模拟集合中每一个时间周期对应的数据作为一个模拟数据,对象预估模型的损耗函数为平均方差损耗函数,获得每一次模拟集合中各模拟数据对应的占比,将各模拟数据的占比与对应的平均方差损失函数进行乘法计算,各乘法计算后求和后,
获得相应的对象损耗函数。
[0025]
可选地,获得每一次模拟集合中各模拟数据对应的占比,具体操作为:根据每一个无人驾驶汽车轮胎对应的轮胎温度变化序列和轮胎气压变化序列汇总,获得未来时间阶段内无人驾驶汽车轮胎的温度和气压的波动情况的关联性,关联性用于表示对对应时间点内模拟数据的占比,占比的计算方法为:
[0026][0027]
其中,na为该无人驾驶汽车轮胎在第a个时刻对应的权重,m
a-1
为该无人驾驶汽车轮胎在第a-1个时刻下对应的气压,t
a-1
为该无人驾驶汽车轮胎在第a-1时刻下对应的温度。
[0028]
本发明与现有技术相比,具有如下的优点和有益效果:
[0029]
本技术方案中根据无人驾驶汽车各轮胎的运行特性序列,计算无人驾驶汽车各轮胎对应的运行状态衡量标准,然后根据无人驾驶汽车各轮胎对应的运行状态衡量标准和无人驾驶汽车各轮胎对应的运行状态衡量标准,来计算无人驾驶汽车轮胎之间的运行水平接近程度,进而计算得到无人驾驶汽车轮胎在初定时间周期内对应的正常工作参数,最后利用无人驾驶汽车轮胎对应的运行特性序列与初定时间周期内对应的正常工作变量对应对象预估模型进行模拟,得到模拟好的对象预估模型。将无人驾驶汽车路轮胎在当前时刻之前的运行特性序列发送到模拟好的对象预估模型,以实现对无人驾驶汽车未来时间阶段内的正常工作参数进行推测,实现对无人驾驶汽车轮胎的胎压、温度进行监测,避免温度过高、胎压所导致的轮胎内裂、爆胎,给行驶带来危险因素。
附图说明
[0030]
图1为本发明的方法流程图。
具体实施方式
[0031]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
[0032]
实施例:
[0033]
如图1所示,一种基于人工智能的无人驾驶汽车轮胎监测方法,包括以下步骤:
[0034]
a001:获得在初定时间周期内无人驾驶汽车轮胎对应的运行特性序列,所述运行特性序列包括轮胎气压变化序列和轮胎温度变化序列;
[0035]
步骤a001中,无人驾驶汽车轮胎中设有监测系统,所述监测系统包括控制装置,与控制装置连接的温度传感器和轮胎胎压传感器,温度传感器用于检测无人驾驶汽车的轮胎温度,轮胎胎压传感器用于检测无人驾驶汽车的轮胎压力,控制装置将接收到的温度传感器和轮胎胎压传感器的检测数据发送给所述监测系统中。
[0036]
具体地,控制装置又称控制器,可为常规的控制芯片,比如单片机,控制装置将接收到的温度传感器、轮胎胎压传感器分别对应采集的数据发送到基于人工智能技术的无人驾驶温度监测系统中。
[0037]
在无人驾驶汽车行进过程中,轮胎如果长时间高速运转,不仅部件结构上出现磨
损,而且温度会不断升高,气压也会随之升高,如果长期处于这种状态,会导致轮胎变形,轮胎胎体弹性降低,汽车受到的动负荷增大,轮胎容易爆胎。因此,需要对无人驾驶汽车轮胎的温度,轮胎胎压进行监测,实时了解无人驾驶汽车轮胎温度和胎压,并在有异常的情况时,及时发出提示,提供行驶的安全性。
[0038]
具体地,在对无人驾驶汽车轮胎进行实时监测过程中,轮胎胎压传感器用于采集无人驾驶汽车轮胎在运行时的压力,温度传感器主要是对无人驾驶汽车轮胎的温度数据进行采集。这些数据通过现有的网络发送到处理装置上,处理装置对接收到的数据进一步分析处理,以利于进一步了解无人驾驶汽车轮胎的工作情况,是否有异常。
[0039]
当无人驾驶汽车轮胎的胎压、温度发生不同变化的情况,对无人驾驶汽车的多个轮胎的运行特性序列进行获得,进而对对象预估模型进行模拟训练,所述运行特性序列包括轮胎气压变化序列和轮胎温度变化序列。轮胎气压变化序列为一段时间内无人驾驶汽车轮胎的胎压在每一个时间阶段的温度指标组成。轮胎温度变化序列为一段时间内无人驾驶汽车内部的温度在每一个时间阶段的温度值组成。选择无人驾驶汽车的多个轮胎,其中无人驾驶汽车本身的配置上相同,来源于一个厂家,同一个无人驾驶汽车。
[0040]
上述中提到的一段时间可为2分钟,也可为3分钟,可根据需要设置。而获得无人驾驶汽车各轮胎在一段时间内的运行特性序列的具体操作为:
[0041]
首先,a0010:采用轮胎胎压传感器测量无人驾驶汽车轮胎的压力值,获得无人驾驶汽车轮胎在某一时间周期内对应的压力数值,根据无人驾驶汽车轮胎在某一时间周期内的压力数值,获得无人驾驶汽车轮胎对应的轮胎气压变化序列;
[0042]
利用压力检测装置测量无人驾驶汽车轮胎的压力,压力检测装置本身为现有结构,具体的采集频率可为1s一次,而轮胎胎压传感器设置的位置可设置轮胎上,具体可为气门嘴位置。
[0043]
同时采用相同方式对无人驾驶汽车轮胎的温度值进行测量,温度传感器的本身结构都是现有的,采集温度数据的方式相同,不再详述。
[0044]
a0011:采用温度传感器测量无人驾驶汽车轮胎的温度值,获得无人驾驶汽车轮胎在某一时间周期内对应的温度值,根据无人驾驶汽车在某一时间周期内的温度值获得无人驾驶汽车轮胎对应的轮胎温度变化序列。
[0045]
温度传感器采集同一时刻或同一时间周期内无人驾驶汽车轮胎的温度数据信息,采集频率可根据需要设置。其中,所述无人驾驶汽车轮胎的轮胎气压变化序列中所包含数据量与轮胎温度变化序列中所包含的数据量相等。
[0046]
a002:依据无人驾驶汽车轮胎的运行特性序列,计算无人驾驶汽车轮胎对应的运行状态衡量标准;
[0047]
a003:依据无人驾驶汽车轮胎对应的运行状态衡量标准和无人驾驶汽车轮胎对应的运行特性序列,计算无人驾驶汽车的任意两个轮胎之间的运行状态接近程度;
[0048]
由于无人驾驶汽车中每个轮胎本身所受到的外力、运行路径的差异,会导致同一个无人驾驶汽车的不同轮胎在同样高速行驶下的压力和温度不同,有所差异。但是当多个无人驾驶汽车轮胎所行驶的环境相近时,也会导致不同的运行特性序列,进而可能在无人驾驶汽车的多个轮胎外部条件接近时评价出现偏差。
[0049]
因此本实施例基于无人驾驶汽车各轮胎对应的运行特性序列,获得无人驾驶汽车
各轮胎对应的运行状态衡量标准,然后根据无人驾驶汽车各轮胎对应的运行状态衡量标准将运行状态衡量标准相近的无人驾驶汽车各轮胎作为一个组合,来减少对无人驾驶汽车各轮胎运行特性评价时造成偏差。
[0050]
步骤a002中,依据无人驾驶汽车轮胎的运行特性序列,计算无人驾驶汽车轮胎对应的运行状态衡量标准;其中,计算无人驾驶汽车轮胎对应的运行状态衡量标准的公式为:
[0051]
xc={avg(tc)*avg(mc)}/{(max(mc))-(min(mc))*(max(tc))min(tc)}
[0052]
其中,xc为无人驾驶汽车轮胎c对应的运行状态衡量标准,tc为无人驾驶汽车轮胎c对应的轮胎温度变化序列,mc为无人驾驶汽车轮胎c对应的轮胎气压变化序列,avg()为平均值,max()为最大值,min()为最小值。
[0053]
根据无人驾驶汽车各轮胎对应的运行状态衡量标准和无人驾驶汽车各轮胎对应的运行特性序列,来就计算无人驾驶汽车中任意两个轮胎之间的运行水平接近程度。其中,无人驾驶汽车中任意两个轮胎之间的运行水平接近程度可直接反应出无人驾驶汽车两个轮胎在初定时间周期内的运行水平的接近程度。当两个轮胎之间的运行状况接近程度越大时,则表明无人驾驶汽车中两个轮胎的运行状况也更接近。计算无人驾驶汽车中任意两个轮胎之间的工作状态接近程度的公式为:
[0054][0055]
其中,dtw为动态时间调整函数,q
c,z
为无人驾驶汽车轮胎c和无人驾驶汽车轮胎z之间的运行水平接近程度;s
c,z
为无人驾驶汽车轮胎c对应的轮胎气压变化序列和无人驾驶汽车轮胎z对应的轮胎气压变化序列之间的余弦相似度;xc为无人驾驶汽车轮胎c对应的运行状态衡量标准,xz为无人驾驶汽车轮胎z对应的运行状态衡量标准;tc为无人驾驶汽车轮胎c对应的轮胎温度变化序列,tz为无人驾驶汽车轮胎z对应的轮胎温度变化序列,e为自然常数。
[0056]
dtw表示两个变化情况汇总的相近情况,当无人驾驶汽车轮胎y与无人驾驶汽车轮胎对应的温度变化波动情况汇总接近程度越大时,dtw(ty,tz)越小,则q
y,z
越大,表示无人驾驶汽车轮胎y和无人驾驶汽车轮胎z的运行水平越接近。运行水平接近程度的取值范围为(1,2),运行水平接近程度越大时,表明运行状况更接近。
[0057]
a004:依据无人驾驶汽车的任意两个轮胎之间的运行水平接近程度,计算无人驾驶汽车轮胎在初定时间周期内各时间阶段内对应的正常工作参数;
[0058]
步骤a004中,根据无人驾驶汽车中任意两个轮胎之间的运行状态衡量标准,计算无人驾驶汽车中任意两个轮胎之间的运行状态衡量标准差值,将所述运行状态衡量标准差值作为任意无人驾驶汽车两个轮胎之间的差距,对无人驾驶汽车轮胎标记相应的运行状况,获得不同运行状况相应的无人驾驶汽车各轮胎。其中,本实施例中,对无人驾驶汽车不同轮胎进行分组所采用的算法为k-means算法,从而获得工作状态相近的无人驾驶汽车轮胎,也可以采用其他具有等同作用的算法。
[0059]
a005:通过无人驾驶汽车轮胎对应的运行特性序列与初定时间周期内各时间阶段内对应的正常工作参数,对对象预估模型进行模拟,模拟好的对象预估模型用于对无人驾驶汽车轮胎未来时间阶段内的正常工作变量进行推测和对无人驾驶汽车轮胎工作状况进
行预测。
[0060]
步骤a005中,通过无人驾驶汽车各轮胎对应的运行特性序列与初定时间周期内各时间阶段内对应的正常工作参数对对象预估模型,获得模拟好的对象预估模型,具体模拟过程为:将无人驾驶汽车某一个轮胎在2分钟内的轮胎温度变化序列、轮胎气压变化序列和正常工作变量序列发送至对象预估模型中,对象预估模型能模拟到无人驾驶汽车轮胎在未来时间范围内的正常工作参数。
[0061]
步骤a005中,无人驾驶汽车每一个轮胎相应的运行特性序列和正常工作参数序列为一次模拟集合,一次模拟集合中每一个时间周期对应的数据作为一个模拟数据,对象预估模型的损耗函数为平均方差损耗函数,获得每一次模拟集合中各模拟数据对应的占比,将各模拟数据的占比与对应的平均方差损失函数进行乘法计算,各乘法计算后求和后,获得相应的对象损耗函数。
[0062]
可选地,获得每一次模拟集合中各模拟数据对应的占比,具体操作为:根据无人驾驶汽车每一个轮胎对应的轮胎温度变化序列和轮胎气压变化序列,获得未来时间阶段无人驾驶汽车轮胎的温度和压力的波动情况的关联性,关联性用于表示对对应时间点内模拟数据的占比,占比的计算方法为:
[0063][0064]
其中,na为该无人驾驶汽车轮胎在第a个时刻对应的权重,m
a-1
为该无人驾驶汽车轮胎在第a-1个时刻下对应的气压,t
a-1
为该无人驾驶汽车轮胎在第a-1时刻下对应的温度。
[0065]
当温度波动跨度与压力波动跨度相同或者接近时,说明温度波动变化与轮胎压力波动变化的关联性很强。表明,获得的数据更可信,所得的占比相应性更大。
[0066]
本实施例中,参与模拟的占比为归一化的表现,并且为同一次数据对应的占比综合为1。本实施例中对象预估模型可为tcn网络预估模型,所述tcn网络为现有技术,不再详述,其他实施例还可使用lstm网络预估模型、rnn网络预估模型等等。
[0067]
最后本实施例分别将无人驾驶汽车轮胎当前时间阶段内的运行特性序列发送到模拟好的对象预估模型中,进而预测无人驾驶汽车各轮胎在未来时间阶段内的正常工作参数,实现对无人驾驶汽车各轮胎的异常监测。在本实施例中,当无人驾驶汽车轮胎的正常工作参数低于0.5时,表明无人驾驶汽车轮胎运行状况出现异常,进而可对操作者及时的发出提示信息,便于操作者及时做出调整,从而提高操作者的操作效率,提高无人驾驶汽车运行的安全性。本实施例中涉及到的正常工作参数为根据实际情况进行设定。
[0068]
本实施例所述监测方法,可应用于新型的信息网络应用环境,基于人工智能技术,进行数据处理、检测,对无人驾驶汽车轮胎的运行特性进行采集、辨别与监控,并对无人驾驶汽车轮胎的运行特性进行分析处理,进而对无人驾驶汽车轮胎的正常工作情况,比如温度、压力变化情况进行预测,在轮胎部件可能出现工作异常性,以及轮胎出现温度变化大时,起到提前提示的作用。
[0069]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1