一种无速度传感器的电动履带底盘转向控制方法与流程
[0001]
本发明涉及一种无速度传感器的电动履带底盘线控转向控制方法,具体是一种不采用速度传感器对电动履带底盘转向的控制方法,满足电动履带底盘线控转向的需求。
背景技术:
[0002]
在电动汽车发展的同时,电动履带式车辆也有广泛应用。履带式车辆具有适应路面能力强,承载能力强的特点,其中要解决的问题主要问题之一即履带的转向控制问题。柴油机驱动的履带底盘多用于室外农业生产活动中,目前市面电动履带底盘转向主要由变速箱分离式转向和速度传感器差速式转向。变速箱分离式转向只能进行手动或拉线式控制,控制方式受限。传统的差速式线控转向需要安装速度传感器,若使用于小型电动履带底盘,在组装过程需要考虑速度传感器安装位置,并且增加速度传感器整车成本将增加等。为了解决这些问题,本发明提出一种无传感器式的电动履带底盘转向控制方法。
技术实现要素:
[0003]
本发明的主要目的在于,提供一种无速度传感器的电动履带底盘线控转向控制方法,该方法能够实现电动履带底盘无速度传感器的控制,实现电动履带底盘的线控转向控制。
[0004]
本发明所涉及的无速度传感器的电动履带底盘线控转向控制方法,在不使用速度传感器的情况下,通过识别电机电压信号来获得电机的转速信息。主控制器给定转向角度信号,转向角度信号通过电子差速器进行转速分配后,由无速度传感器电机控制器来控制电机转速,以电动履带底盘两侧履带差速行驶来实现转向。
[0005]
为了实现上述发明目的,本发明采用了如下技术方案:无速度传感器的电动履带底盘线控转向控制方法,主控制器、电子差速器、左无速度传感器电机控制器、右无速度传感器电机控制器、左电压传感器、右电压传感器组成。
[0006]
主控制器连接电子差速器,电子差速器连接左无速度传感器电机控制器与右无速度传感器电机控制器,左无速度传感器电机控制器与右无速度传感器电机控制器分别连接左驱动电机与右驱动电机,分别对电动履带底盘左驱动电机和右驱动电机速度控制。左驱动电机与右驱动电机分别连接左电压传感器与右电压传感器,左电压传感器与右电压传感器将转速信息反馈给电子差速器,由电子差速器将转向所需转速分别输出左无速度传感器电机控制器和右无速度传感器电机控制器,同时驱动左驱动电机和右驱动电机差速工作,实现履带底盘的转向控制。本发明的无速度传感器的电动履带底盘转向控制方法具有以下几方面的特点:(1)在不使用速度传感器的情况下实现电动履带底盘的转向控制。不使用速度传感器,避免了传感器位置的安装问题和工作时速度传感器受干扰问题。
[0007]
(2)相比市面上电动履带底盘手动控制或拉线控制,提供了新型的转向控制方法。
[0008]
(3)控制方法灵活,可实现各种差速转向。通过捕捉定子绕组的一个周期,计算转
速根据交流电机转速、频率和周期的关系:,式中,为电机转速,为定子绕组中交流电的频率,为周期,为电机旋转磁场的对数。
[0009]
得知转速后可分别获得左侧履带的行驶速度和右侧履带行驶速度后,可控制以不同半径进行差速转向。根据两侧履带中心距离、行驶速度和转弯半径的关系:式中,为转向半径,为两侧履带中心距离,左侧履带的行驶速度,为右侧履带行驶速度,为电机旋转磁场的对数。
附图说明
[0010]
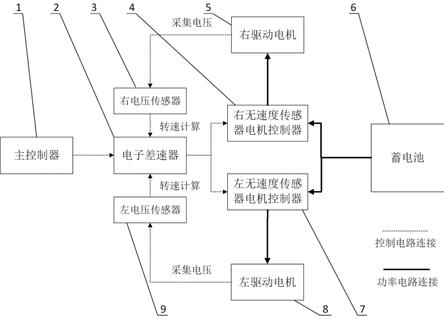
图1为本发明实施例1结构原理图。
[0011]
图2为本发明实施例2结构原理图。
具体实施方式
[0012]
为更好地理解本发明,下面结合附图和实施例对本发明作进一步的说明,但本发明的实施方式不限于此。
[0013]
实施例1如图1所示,无速度传感器的电动履带底盘线控转向控制方法,其控制部分主控制器1、电子差速器2、左无速度传感器电机控制器7、右无速度传感器电机控制器4、左电压传感器9、右电压传感器3组成。
[0014]
其中主控制器1连接电子差速器2,电子差速器2分别连接左无速度传感器电机控制器7与右无速度传感器电机控制器4,左无速度传感器电机控制器7与右无速度传感器电机控制器4分别连接左驱动电机8与右驱动电机5。同时由蓄电池6分别连接左无速度传感器电机控制器7、右无速度传感器电机控制器5,为左驱动电机8与右驱动电机5提供能源。
[0015]
左驱动电机8与右驱动电机5分别连接左电压传感器9与右电压传感器3,左电压传感器9与右电压传感器3将转速信息反馈给电子差速器2,由电子差速器2将转向所需转速分别输出左无速度传感器电机控制器7和右无速度传感器电机控制器4,同时驱动左驱动电机8和右驱动电机5差速工作,实现履带底盘的转向控制。
[0016]
本发明的工作模式如下:如图1所示,无速度传感器的电动履带底盘线控转向控制方法,主控制器1连接电子差速器2,电子差速器2分别连接左无速度传感器电机控制器7与右无速度传感器电机控制器4。
[0017]
由主控制器1连接电子差速器2,向电子差速器输入转向信息。电子差速器2分别连接左无速度传感器电机控制器7与右无速度传感器电机控制器4,左无速度传感器电机控制
器7与右无速度传感器电机控制器4分别连接左驱动电机8与右驱动电机5。同时由蓄电池6分别连接左无速度传感器电机控制器7、右无速度传感器电机控制器4,为左驱动电机8与右驱动电机5提供能源。
[0018]
左驱动电机8与右驱动电机5分别连接左电压传感器9与右电压传感器3,左电压传感器9与右电压传感器3将电压信号反馈给电子差速器2,由电子差速器2将转向所需转速分别输出左无速度传感器电机控制器7和右无速度传感器电机控制器5,同时驱动左驱动电机8和右驱动电机5差速工作,实现履带底盘的线控转向。
[0019]
实施例2图1中的超级电容也可以按照图2的方法进行连接,如图2所示,其中主控制器11连接can总线17,由can总线17连接转向控制器13,转向控制器分别连接左驱动电机16与右驱动电机14。由蓄电池15与转向控制器13连接,为左驱动电机16与右驱动电机14提供能源。
[0020]
由转向控制器13分别控制左驱动电机16和右驱动电机14进行差速运行,实现电动履带底盘的线控转向。
[0021]
和实施例1相比,可将实例1中的模块集成为转向控制器13,由转向控制器13连接至can总线17。通过使用can通讯来增加通讯接口,方便在后续添加其他控制模块,以实现更多控制功能。
[0022]
具体的工作原理与实施例1基本相同,此处不做赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1