一种丘陵山地果园自动卸筐无人运输车
1.本专利涉及一种丘陵山地果园自动卸筐无人运输车,具体涉及丘陵山地果园运输自动化与智能化领域。
背景技术:
2.水果是人类饮食中不可缺少的重要组成部分,目前果园产业已成为果农的主要经济来源,但是我国大部分果园分布在丘陵山地,由于其地形地貌限制,现有机械存在难进难出、作业性能与稳定性能差等问题,尤其是采后果实运输环节,主要以人工为主,费时费力。随着果园产业种植模式转变和劳动力成本逐年递增,对于果园运输机械的需求增加。采用自动卸筐无人运输车,完成果实的果园内运输,不仅能够提高机械化、自动化和智能化水平,还能减少人工成本投入和运输环节果实的损伤。
3.中国专利cn 209226029 u公开了一种山地果园运输机,包括导轨、导轨支柱、齿条、机动装置、从动装置、控制箱、民用gps、变速电机、蓄电池、速度传感器、装载斗、连接杆、伸缩围栏、插销。机动装置和两从动装置结构相同,连接于导轨,机动装置顶部固定有控制箱,机动装置侧面安装有变速电机和蓄电池,控制箱前端安装有速度传感器。此装置能够完成果园运输工作,但是轨道铺设成本高,应对风险能力较差。
4.有鉴于此,需要一种丘陵山地果园自动卸筐无人运输车,使用履带式底盘、自动卸筐装置和自动导航系统三者相结合的自动卸筐无人运输车,能够完成果园内果筐的运输。而且目前丘陵山地没有应用于果园的自动卸筐无人运输车,因此丘陵山地果园的自动卸筐无人运输车的研究对于提高采后果实运输效率和减少劳动力需求具有重要意义。
技术实现要素:
5.针对丘陵山地果园运输时的劳动需求量大、工作效率低等问题,本实用新型提出一种丘陵山地果园的自动卸筐无人运输车。
6.本专利通过下列技术方案实现:一种丘陵山地果园的自动卸筐无人运输车,由履带式底盘(1)、抬升机构(2)和自动导航系统(3)组成。其特征是:履带式底盘(1)包括底盘(101)和车厢(102);车厢(102)安装在底盘(101)上部,由底盘(101)带动车厢(102)运动,车厢(102)上部开口,用于装入果筐,车厢(102)前部用滑槽安装可打开,用于卸载果筐;抬升机构(2)安装在车厢(102)中,抬升机构(2)中的电磁铁(204)通断电,可以控制弹簧(203)的压缩程度,以调节抬升支架(201)后端的高度;抬升支架(201)后端被弹簧(203)弹力抬升时,果筐可以沿着该倾角将果筐卸到指定位置;自动导航系统(3)通过3d激光雷达(302)实时获取果园环境的三维点云信息;工控机(305)完成三维果园的建图、二维栅格地图的创建、履带式底盘(1)在果园的定位、履带式底盘(1)全局路径规划和局部路径规划;stm32控制板(301)完成对惯性测量单元(304)和电机的控制,并接收工控机(305)的指令,操作电机、上传速度、角速度及惯性测量单元(304)数据;wi-fi模块(303)完成与远程控制端的无线通信;惯性测量单元(304)完成履带式底盘(1)姿态、速度和位移信息的获取;最后,实现
履带式底盘(1)在果园中的自动导航功能。
7.车厢(102)安装在底盘(101)上部,由底盘(101)带动车厢(102)运动,车厢(102)上部开口,用于装入果筐,车厢(102)前部用滑槽安装可打开,用于卸载果筐;履带式底盘(1)的车厢(102)安装有抬升支架(201),电磁铁(204)断电后,抬升支架(201)后端可在弹簧(203)的作用下抬升,构建一个斜面;抬升支架(201)上安装滚轮(202),滚轮(202)可绕其中心轴旋转,果筐沿坡度下移时,减小运动摩擦力;3d激光雷达(302)安装在履带式底盘(1)正前方,用于果园环境三维点云的获取;工控机(305)安装在履带式底盘(1)后端左侧,进行导航数据处理和控制指令的接收,完成三维果园的建图、二维栅格地图的创建、履带式底盘(1)在果园的定位、履带式底盘(1)全局路径规划和局部路径规划;stm32控制板(301)安装在履带式底盘(1)前端左侧,完成对惯性测量单元(304)和电机的控制,并接收工控机(305)的指令,操作电机、上传速度、角速度及惯性测量单元(304)数据;wi-fi模块(303)安装在履带式底盘(1)前端右侧,完成与远程控制端的无线通信;惯性测量单元(304)安装在履带式底盘(1)后端右侧,完成履带式底盘(1)姿态、速度和位移信息的获取。
8.优选的,所述履带式底盘(1)的车厢(102)上方开口,车厢(102)前部可打开,方便放入果筐和果筐沿着抬升支架滑出。
9.优选的,所述抬升支架(201)通过电磁铁(204)通断电改变弹簧(203)的压缩状态控制其后端的高度,使抬升支架(201)保持水平或构建一个30
°
的斜面,以运输果筐和果筐沿着抬升支架(201)运动。
10.优选的,所述抬升支架(201)中间安装滚轮(202),滚轮(202)可绕其中心旋转,减少果筐沿抬升支架(201)下行时的阻力,材料选用工业塑料。
11.优选的,所述3d激光雷达(302)安装在履带式底盘(1)正前方,用于果园环境三维点云的获取。
12.优选的,所述工控机(305)位于履带式底盘(1)后端左侧,进行导航数据处理和控制指令接收,完成三维果园的建图、二维栅格地图的创建、履带式底盘(1)在果园的定位、履带式底盘(1)全局路径规划和局部路径规划。
13.优选的,所述stm32控制板(301)安装在履带式底盘(1)前端左侧,完成对惯性测量单元(304)和电机的控制,并接收工控机(305)的指令,操作电机、上传速度、角速度及惯性测量单元(304)数据。
14.优选的,所述wi-fi模块(303)安装在履带式底盘(1)前端右侧,完成与远程控制端的无线通信。
15.优选的,所述惯性测量单元(304)安装在履带式底盘(1)后端右侧,完成履带式底盘(1)姿态、速度和位移信息的获取。
附图说明
16.下面结合附图和实施方式对本专利进一步说明。
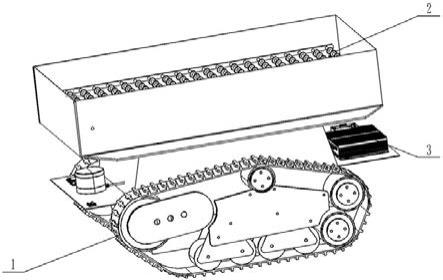
17.图1是一种丘陵山地果园的自动卸筐无人运输车;
18.图2是履带式底盘(1)的结构示意图;
19.图3是自动卸筐装置(2)的结构示意图;
20.图4是自动导航系统(3)的结构示意图。
21.以下是图中各部件标号:
22.履带式底盘(1)、自动卸筐装置(2)、自动导航系统(3)、底盘(101)、车厢(102)、抬升支架(201)、滚轮(202)、电磁铁(204)、弹簧(203)、3d激光雷达(302)、工控机(305)、stm32控制板(301)、惯性测量单元(304)、wi-fi模块(303)。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
24.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、
ꢀ“
外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
25.如图所示,本专利的一种丘陵山地果园的自动卸筐无人运输车,包括履带式底盘(1)、抬升机构(2)和自动导航系统(3)三部分。履带式底盘(1)包括底盘(101)、上方不进行封口且前部可打开的车厢(102);抬升机构(2)包括抬升支架(201)、滚轮(202)、电磁铁(204)和弹簧(203);自动导航系统(3)包括3d激光雷达(302)、工控机(305)、stm32控制板(301)、惯性测量单元(304)、wi-fi模块(303);车厢(102)安装在底盘(101)上部,由底盘(101)带动车厢(102)运动,车厢(102)上部开口,用于装入果筐,车厢(102)前部可打开,用于卸载果筐;履带式底盘(1)的车厢(102)安装有抬升支架(201),抬升支架(201)相对于车厢(102)的底面平行安装,具有支撑作用,当后端被抬升时具有导向作用;抬升支架(201)后端与电磁铁(204)和弹簧(203)连接,通过电磁铁(204)的通断改变弹簧(203)被压缩的程度,从而改变抬升支架(201)后端被抬升的高度,即抬升支架(201)是否形成坡度;抬升支架(201)上安装滚轮(202),滚轮(202)旋转有助于果筐沿着抬升支架(201)向下运动;3d激光雷达(302)安装在履带式底盘(1)正前方,用于果园环境三维点云的获取;工控机(305)安装在履带式底盘(1)后端左侧,进行导航数据处理和控制指令的接收,完成三维果园的建图、二维栅格地图的创建、履带式底盘(1)在果园的定位、履带式底盘(1)全局路径规划和局部路径规划;stm32控制板(301)安装在履带式底盘(1)前端左侧,完成对惯性测量单元(304)和电机的控制,并接收工控机(305)的指令,操作电机、上传速度、角速度及惯性测量单元(304)数据;wi-fi模块(303)安装在履带式底盘(1)前端右侧,完成与远程控制端的无线通信;惯性测量单元(304)安装在履带式底盘(1)后端右侧,完成履带式底盘(1)姿态、速度和位移信息的获取。
26.具体工作过程:
27.工作时,3d激光雷达(302)实时获取果园环境的三维点云信息,工控机(305)完成三维果园的建图,二维栅格地图的创建,履带式底盘(1)在果园的定位,履带式底盘(1)全局路径规划和局部路径规划,stm32控制板(301)完成对惯性测量单元(304)和电机的控制,并接收工控机(305)的指令,操作电机,上传速度,角速度及惯性测量单元(304)数据,wi-fi模块(303)完成与远程控制端的无线通信,惯性测量单元(304)完成履带式底盘(1)姿态,速度和位移信息的获取,最终实现履带式底盘(1)在果园中的自动导航功能,履带式底盘(1)到
达指定卸筐位置时,履带式底盘(1)停止运动,电磁铁(204)断电,抬升支架(201)后端被抬升,果筐沿着抬升支架(201)下滑到指定卸筐位置,依次进行果筐的运输作业。
28.所述履带式底盘(1)的车厢(102)上方开口,车厢(102)前部可打开,方便放入果筐和果筐沿着抬升支架(201)滑出。
29.所述抬升支架(201)通过电磁铁(204)通断电改变弹簧(203)的压缩状态控制其后端的高度,使抬升支架(201)保持水平或构建一个30
°
的斜面,以运输果筐和果筐沿着抬升支架(201)运动。
30.所述抬升支架(201)中间安装滚轮(202),滚轮(202)可绕其中心旋转,减少果筐沿抬升支架(201)下行时的阻力,材料选用工业塑料。
31.所述3d激光雷达(302)安装在履带式底盘(1)正前方,用于果园环境三维点云的获取。
32.所述工控机(305)位于履带式底盘(1)后端左侧,进行导航数据处理和控制指令的接收,完成三维果园的建图、二维栅格地图的创建、履带式底盘(1)在果园的定位、履带式底盘(1)全局路径规划和局部路径规划。
33.所述stm32控制板(301)安装在履带式底盘(1)前端左侧,完成对惯性测量单元(304)和电机的控制,并接收工控机(305)的指令,操作电机、上传速度、角速度及惯性测量单元(304)数据。
34.所述wi-fi模块(303)安装在履带式底盘(1)前端右侧,完成与远程控制端的无线通信。
35.所述惯性测量单元(304)安装在履带式底盘 (1)后端右侧,完成履带式底盘(1)姿态、速度和位移信息的获取。
36.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本实用新型的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1