用于监控电动转向装置的方法和转向装置与流程
1.本发明涉及一种根据权利要求1所述的用于监控电动转向装置的方法以及一种根据权利要求19所述的、通过这样的方法监控的、具有电动转向致动器的电动转向装置以及还有一种根据权利要求20所述的具有这样的电动转向装置的车辆。
背景技术:
2.具有电动转向致动器的电动转向装置如今也用于部分自主或自动驾驶系统中,以便至少部分自动化地横向引导车辆。
3.在“手动驾驶”中,驾驶员在其纵向和横向引导方面操作车辆。即使通过驾驶员辅助系统可以支持或也部分地接管纵向和横向引导,驾驶员仍然对车辆负责,并其负责监控所有基本的运行功能。
4.在运行模式“部分自主或部分自动化驾驶”的范畴内,已知驾驶员辅助系统,其例如警告驾驶员碰撞并且在必要时还通过干预试图避免碰撞。这样的驾驶员辅助系统的示例是紧急制动辅助、车道保持辅助、死角辅助、泊车辅助和所谓的自适应巡航控制(acc),尤其是用于高速公路行驶。
5.相反,在“高度自动化驾驶”的情况下,至少暂时地将职责转移给控制技术。然后设计用于车辆引导的系统,使得该系统可以至少在确定时间内并且例如在限定的环境中(例如在高速公路上)完全接管车辆的引导。然后,驾驶员也不再有责任监控调节功能。但是,由于然后总是可能出现危急情况(例如传感装置的故障、交通情况不明等),系统也可以将引导职责交还给驾驶员。为了这可以发生,必须确保驾驶员可以在几秒钟的时间窗内再次接管机动车的引导。即,运行模式“高度自动化驾驶”的特征在于,驾驶员至少在限定的时间段内和在确定的情况下不必连续监控机动车的引导。然而,驾驶员必须保持能够在合理的时间内再次接管机动车的引导。运行模式“高度自动驾驶”与运行模式“手动驾驶”和“部分自动化驾驶”的区别也可以在于,运行模式“高度自动化驾驶”中的车辆完全自动地驾驶通过导航系统输入的驾驶路段,其中,车辆通过电子系统自动加速、制动和转向。
6.因此,高度自动化驾驶(had,highly autonomous driving,高度自动驾驶)以了解车辆环境为前提。为此,借助一个或多个传感器例如雷达、激光雷达、摄像机、超声波传感器或现有技术中已知的类似传感器来扫描或记录环境。借助传感器测量,借助同样在现有技术中已知的信号处理方法,然后识别对象对环境的占用。所述占用表明,在某一区段中的环境不能由车辆驶过,并且借此说明对象的位置。附加地,识别对象的类型或性质,即是否是行人、车辆、车道边界、交通信号灯等。借助识别的占用和对象的类型创建环境模型,该环境模型提供关于对象占用环境的信息或数据(即,尤其是由对象占用的环境区段)和对象的类型。
7.带有电动转向致动器的电动转向装置在此要么用作辅助转向装置(在所述辅助转向装置中,电动转向致动器借助在车辆的方向盘和转向轮(gelenkten )之间的机械连接来支持机械转向装置),要么用作全电动转向装置(在所述全电动转向装置中,仅电
动转向致动器在转向意义上控制或调节车辆的转向轮)。
8.这样的转向装置应特别是在上述部分自主或自主驾驶的范畴内在其功能优越性方面被持续监控,以便避免非期望的转向干预、尽管存在转向请求但是仍不发生转向干预、或错误的转向干预。
9.例如,可以通过冗余存在的方向盘角度传感器对电动转向装置进行这样的监控,然后在冗余微控制器中对所述方向盘角度传感器的信号进行可信度检验,这些冗余微控制器相互监控。然而,用于错误探测的转向装置部件的这种冗余实施伴随着一定的开销和成本。
技术实现要素:
10.因此,本发明的任务在于,提供一种用于监控电动转向装置的方法,该方法需要较少的开销。此外,还应提供一种通过这样的方法监控的电动转向装置,以及一种具有这样的电动转向装置的车辆。
11.该任务通过权利要求1、12和13中所述的特征来解决。
12.本发明的进一步的有利构型和扩展方案由从属权利要求得出。
13.本发明提出一种用于在车辆行驶期间监控所述车辆的电动转向装置的方法,在所述方法中,
14.a)产生表征所述车辆的当前的目标运动方向的目标运动方向信号,在至少一个电子控制设备中对所述目标运动方向信号进行处理,并且在所述方法中,
15.b)将通过所述车辆的对所述车辆的环境进行非接触式检测的环境传感器装置所产生的、
16.b1)并且首先设置用于通过第一驾驶员辅助系统进行的处理的、表征所述车辆环境的环境数据,
17.b2)所述环境数据使得能够检测所述车辆的当前的实际运动方向,导入(eingesteuert)到所述至少一个电子控制设备中,其中,
18.c)所述至少一个电子控制设备然后基于所述环境数据产生表征所述车辆的当前的实际运动方向的实际运动方向信号,并且
19.d)在所述至少一个电子控制设备中,在所述实际运动方向信号和所述目标运动方向信号之间进行比较,其中,
20.e)在通过所述至少一个电子控制设备已确定所述实际运动方向信号与所述目标运动方向信号的显著偏差的情况下,产生表征所述电动转向装置的功能故障的功能故障信号,否则不产生任何功能故障信号。
21.换言之,将目标运动方向信号(该目标运动方向信号例如由与车辆的方向盘共同作用的方向盘角度传感器或方向盘扭矩传感器根据方向盘的操纵产生和/或由第二驾驶员辅助系统产生)与实际运动方向信号(该实际运动方向信号源自车辆的环境传感器装置,该环境传感器装置实际上形成第一驾驶员辅助系统的组成部分,该第一驾驶员辅助系统例如实施与电动转向装置的监控不同的功能)进行比较。因此,本发明利用在当今的车辆上常见并且因此已经存在的至少一个驾驶员辅助系统的现有的环境传感器装置,以便通过这样的比较来监控电动转向装置的功能方式。
22.因此,如果所述比较得出,确定了实际运动方向信号与目标运动方向信号的显著偏差,那么产生表征电动转向装置发生功能故障的功能故障信号,否则,如果不存在功能故障,则不产生功能故障信号。功能故障信号可以表示表征电动转向装置的功能故障的任何一个信号,尤其是操控警告装置的警告信号和/或操控车辆的任何一个装置的控制信号,以便例如执行至少一个安全措施,所述至少一个安全措施要么补偿电动转向装置的功能故障要么减少或完全消除电动转向装置对车辆转向的影响。
23.因此,在根据本发明的方法的范畴内,在环境传感器装置的有利的双重功能的意义上,由已经存在于车辆上的、第一驾驶员辅助系统的环境传感器装置获得的环境数据不仅考虑用于在第一驾驶员辅助系统中进行处理,而且此外还考虑用于在第一驾驶员辅助系统之外进行处理,以用于探测电动转向装置的功能故障。由此可以节省通常可以探测电动转向装置功能故障的附加部件。
24.电动转向装置尤其可以实施为具有或没有在方向盘和转向机构之间的连续的机械连接。电动转向装置可以包含电子转向控制设备,将设定指令导入到该电子转向控制设备中,该电动转向装置然后在作为转向设定器的电动转向致动器中实现所述设定指令。替代地,设定指令也可以例如由电子控制设备直接导入到电动转向致动器中。
25.如开头所提到地,电动转向装置可以是辅助转向装置,在该辅助转向装置中,电动转向致动器借助在车辆的方向盘和转向轮之间的机械连接支持机械转向装置;或者可以是全电动转向装置,在所述全电动转向装置中,仅电动转向致动器在转向意义上控制或调节车辆的转向轮。
[0026]“环境数据”应理解为如下数据:所述数据与车辆的环境有关,并且尤其是与位于车辆的环境中的对象有关,例如位于车辆的上方、下方、前面、旁边和/或后面的对象、障碍物、人员或车辆。
[0027]“基于由环境传感器装置提供的环境数据使得能够检测车辆的当前的实际运动方向”意味着,环境传感器装置原则上能够检测当前运动方向和/或车辆的当前运动方向的变化,例如通过参考车辆环境中的至少一个静止参考对象,例如桥墩、交通标志、交通灯杆、灯杆等。
[0028]
尤其地,将高于实际运动方向信号和目标运动方向信号之间的预先给定的差考虑用作实际运动方向信号与目标运动方向信号的显著偏差。
[0029]
通过从属权利要求中列出的措施能够实现权利要求1中说明的本发明的有利扩展方案和改进方案。
[0030]
根据一种特别优选的措施,目标运动方向信号由与车辆的方向盘共同作用的方向盘角度传感器或方向盘扭矩传感器根据方向盘的操纵地产生。
[0031]
替代地或附加地,目标运动方向信号可以由第二驾驶员辅助系统产生。
[0032]
第二驾驶员辅助系统可以部分自主地或自主地干预车辆的驱动装置(antrieb)和/或制动装置和/或电动转向装置和/或信号装置(signalisierungseinrichtung),和/或通过人机界面在危急情况之前不久或在危急情况期间警告车辆驾驶员。
[0033]
尤其地,第二驾驶员辅助系统可以实施与电动转向装置的监控不同的功能。
[0034]
例如,第二驾驶员辅助系统可以由以下驾驶员辅助系统中的至少一个形成:自适应巡航控制(acc)、自动距离警告系统、紧急制动辅助、车道保持辅助、车道识别系统、车道
偏离警告系统、车道变换辅助、转弯辅助、用于控制或调节由电子耦合的车辆组成的车辆编队(platoon,车队)的系统、死角监控系统、交通标志识别系统、泊车辅助系统,用于自主地或部分自主地驾驶的系统。
[0035]
同样,例如与第二驾驶员辅助系统不同的第一驾驶员辅助系统可以部分自主地或自主地干预车辆的驱动装置和/或制动装置和/或电动转向装置和/或信号装置,和/或通过人机界面在危急情况之前不久或在危急情况期间警告车辆驾驶员。
[0036]
例如,第一驾驶员辅助系统可以实施与电动转向装置的监控不同的功能。
[0037]
尤其地,第一驾驶员辅助系统可以由以下驾驶员辅助系统中的至少一个形成:自适应巡航控制(acc)、自动距离警告系统、紧急制动辅助、车道保持辅助、车道识别系统、车道偏离警告系统、车道变换辅助、转弯辅助、用于控制或调节由电子耦合的车辆组成的车辆编队(platoon,车队)的系统、死角监控系统、交通标志识别系统、泊车辅助系统,用于自主地或部分自主地驾驶的系统。
[0038]
根据sae(society of automotive engineers,汽车工程师协会)j3q16的定义,驾驶时的自动化程度概括为5个级别。术语“系统”在此要么代表驾驶员辅助系统、各个驾驶员辅助系统的组合要么代表完全自主的驱动系统、制动系统和转向系统。自动化的程度变得越来越全面,其开始于通知或警告驾驶员的系统(0级),进一步至仅接管要么车辆纵向引导要么车辆横向引导的系统,其中,驾驶员始终负责观察环境或作为后备解决方案介入(1级)。2级系统提供了更全面的自动化,该2级系统已经接管了车辆的纵向引导和横向引导,环境的观察和后备级别继续地保留在驾驶员处(2级)。3级系统自动化地引导车辆,而无需驾驶员观察环境,然而,驾驶员必须继续充当后备级别。在4级中,系统已经完全负责车辆引导,并且必须在发生故障时提供与系统相关的相应后备解决方案。5级与4级的不同之处仅在于自动化的车辆引导必须在所有条件下起作用,在4级下这仅限于所选择的情况。
[0039]
上面提及的“用于部分自主地或自主地驾驶的系统”在此应理解以下系统:所述系统的运行根据上述sae j3016至少在2级中或在与之相比更高级别中进行。
[0040]
根据一种扩展方案,在产生功能故障信号的情况下执行安全措施。如上面已经提到地,安全措施可以要么补偿电动转向装置的功能故障要么减少或完全消除电动转向装置对车辆转向的影响。
[0041]
如果电动转向装置例如是辅助转向装置,在该辅助转向装置中,电动转向致动器借助在车辆的方向盘和转向轮之间的机械连接支持机械转向装置,那么例如作为安全措施优选关闭电动转向装置,以便该电动转向装置不再对车辆的转向产生任何影响(“故障沉默(fail silent)”)。
[0042]
替代地,如果电动转向装置实施为全电动的并且然后在没有在方向盘和转向机构之间的机械连接的情况下仅电动转向致动器在转向意义上控制或调节车辆的转向轮,那么,例如,作为安全措施,例如借助车辆的行车制动器执行车辆的制动,直至停止为止。因此,证明为缺陷的电动转向装置对车辆转向行为的影响虽然不能立即消除,但是可以在车辆的由自动运行制动引起的静止状态之后消除。根据一种有利的扩展方案,然后在确定车辆在静止状态中时激活车辆的驻车制动器,以便确立车辆的安全状态。
[0043]
根据另一优选的措施,将以下传感器中的至少一个用作环境传感器装置的环境传感器:视频摄像机、倒车摄像机、雷达传感器、激光雷达传感器、超声波传感器、行车记录
仪.。
[0044]
执行所述比较并且产生错误功能信号的电子控制设备优选地由电动转向装置的转向控制设备形成。替代地,电子控制设备可以是独立控制设备或者可以由任何其他控制设备形成。此外,电子控制设备可以不形成第一驾驶员辅助系统和/或第二驾驶员辅助系统的任何部件,或者可以形成第一驾驶员辅助系统和/或第二驾驶员辅助系统的部件。
[0045]
本发明还涉及一种具有通过上述方法监控的电动转向致动器的电动转向装置,以及还涉及一种具有这样的电动转向装置的车辆、尤其是商用车辆。
附图说明
[0046]
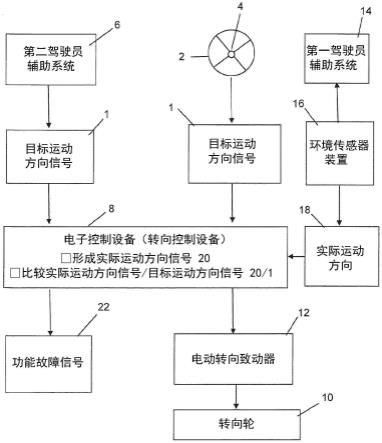
现在,基于优选的实施方式参考随附的绘图以示例的方式解释本发明。单个的附图示出了根据本发明的一种优选实施方式的用于在车辆行驶期间监控车辆的电动转向装置的方法的流程图。
具体实施方式
[0047]
根据该附图,提出了一种用于在车辆行驶期间监控车辆的电动转向装置的方法。
[0048]
在此,首先,产生表征车辆当前目标运动方向的目标运动方向信号1。目标运动方向信号1表征了车辆的目标运动方向,由于当前存在的转向请求,车辆将在该目标运动方向上运动。在此,转向请求除了与车辆的例如刚刚存在的运动轨迹偏离的运动方向(“改变现有转向角”)之外还可以包含与刚刚存在的运动轨迹一致的运动方向(“保持现有转向角”)。
[0049]
例如,目标运动方向信号1由与车辆的方向盘2共同作用的方向盘角度传感器或方向盘扭矩传感器4根据由车辆驾驶员进行的对方向盘2的操纵地产生。替代地或附加地,目标运动方向信号可以由用于自主地或部分自主地驾驶的系统6产生,该系统在附图中标语式地称为“autopilot,自动驾驶仪”。
[0050]
然后将目标运动方向信号1导入电子控制设备8中,该电子控制设备在此例如由电动转向装置的电子转向控制设备形成。
[0051]
电动转向装置在此例如是全电动转向装置(“线控转向”),其中在方向盘2和转向轮10之间不再存在任何机械连接。然后,在方向盘2上布置有方向盘角度传感器或方向盘扭矩传感器4,该方向盘角度传感器或方向盘扭矩传感器将取决于方向盘2的操纵的目标运动方向信号1导入到电子控制设备8中,该电子控制设备然后根据目标运动方向信号1操控电动转向致动器12,最终,该电动转向致动器在转向请求信号的意义上控制或调节转向轮10。代替于通过方向盘2或附加于此地,转向请求信号也可以由第二驾驶员辅助系统6产生,例如用于部分自主地或完全自主地驾驶的系统。
[0052]
替代地,电动转向装置也可以是电动辅助转向装置,其中电动转向致动器12借助在车辆的方向盘2和转向轮10之间的机械连接来支持在此没有示出的机械转向装置,其方式为,该电动转向致动器将转向扭矩施加到该机械连接上,该转向扭矩也可以独立于方向盘2的操纵而产生。电动转向致动器12在此又由电子控制设备8操控,该电子控制设备例如从诸如车道保持辅助的驾驶员辅助系统接收目标运动方向信号1。因此,在这两种情况下,目标运动方向信号1在电子控制设备8中被处理并且然后操控电动转向致动器12,该电动转向致动器然后相应于目标运动方向信号1地偏转转向轮10。
[0053]
在车辆上还存在第一驾驶员辅助系统14,其在此例如由自适应巡航控制(acc)形成。第一驾驶员辅助系统14包括环境传感器装置16,在此例如以布置在车辆前部的雷达传感器的形式,该雷达传感器提供雷达信号,该雷达信号通过在电子acc控制设备中的处理而允许推断出相对于例如前方行驶车辆的距离、相对速度并且例如还有车辆相对加速度(环境数据),并且在必要时(即,例如在低于距前方行驶车辆的与速度相关的最小距离时)触发自动制动。这样的acc系统是众所周知的,因此在此将不进一步对此进行讨论。
[0054]
实际上分配给第一驾驶员辅助系统14的或由其包括的环境传感器装置16(在此例如以雷达传感器的形式)也能够检测车辆的当前的实际运动方向18和/或当前的实际运动方向18的变化,其方式为,通过相应的、在电子控制设备8中实现的方向识别算法处理雷达传感器16的雷达信号。
[0055]
然后基于方向识别算法在电子控制设备8中产生表征车辆当前实际运动方向的实际运动方向信号20。然后在电子控制设备中将该实际运动方向信号20与在那里同样导入的目标运动方向信号1(见上文)进行比较。
[0056]
如果所述比较然后得出实际运动方向信号20与目标运动方向信号1存在显著偏差,则产生表征电动转向装置功能故障的功能故障信号22,否则不产生功能故障信号。因为这样的显著偏差表明,目标运动方向信号1没有相应地由电动转向装置实现。
[0057]
尤其考虑使用高于在实际运动方向信号20和目标运动方向信号1之间的预先给定的差来作为实际运动方向信号20与目标运动方向信号1的显著偏差。
[0058]
换言之,将目标运动方向信号1与源自环境传感器装置16的实际运动方向信号20进行比较,所述环境传感器装置实际上形成第一驾驶员辅助系统14的组成部分。但是,第一驾驶员辅助系统14(在此例如实施为acc系统)实施与监控电动转向装置不同的功能,如上所述。因此,本发明利用第一驾驶员辅助系统14的雷达传感器16,以便通过上述比较来监控电动转向装置的功能。
[0059]
因此,如果所述比较得出,确定了实际运动方向信号20与目标运动方向信号1的显著偏差,那么产生表征电动转向装置功能故障的功能故障信号22,否则,如果不存在功能故障,则不产生功能故障信号22。
[0060]
功能故障信号22可以表示表征电动转向装置的功能故障的任何一个信号,尤其是操控警告装置的警告信号和/或操控车辆的任何一个装置以便例如执行至少一个安全措施的控制信号,所述至少一个安全措施要么补偿电动转向装置的功能故障要么减少或者完全消除电动转向装置对车辆转向的影响。
[0061]
根据一种扩展方案,在产生功能故障信号20的情况下执行安全措施。这种安全措施可以要么补偿电动转向装置的功能故障要么减少或者甚至完全消除电动转向装置对车辆转向的影响。
[0062]
如果如在此一样地将电动转向装置实施为全电动的并且然后实施为在方向盘2和转向轮10之间没有机械连接的(“线控转向”),那么,作为安全措施,例如借助车辆的行车制动器执行车辆的自动制动,直到静止状态为止。因此,证明为缺陷的电动转向装置对车辆转向行为的影响虽然不能立即消除,但是可以在车辆的由自动行车制动引起的静止状态之后消除。根据一种有利的扩展方案,然后在确定车辆静止状态时激活车辆的驻车制动器,以便确立车辆的安全状态。
[0063]
如果电动转向装置替代地是上述的电动辅助转向装置,那么,作为安全措施,优选关闭电动辅助转向装置,以便该电动辅助转向装置不再对车辆的转向产生任何影响(“故障沉默”)。
[0064]
执行比较、产生错误功能信号22并且在必要时启动相关安全措施的电子控制设备8在此优选地由电动转向装置的转向控制设备形成。替代地,电子控制设备8也可以是独立控制设备或者由任何其他控制设备形成。
[0065]
下面将基于示例来解释该方法的功能方式
[0066]
示例1
[0067]
如果具有纯电动转向(“线控驱动”)的车辆将由驾驶员在方向盘2上受控地例如沿着弯道驾驶,则驾驶员通过方向盘2上的转向运动预先给定目标运动方向信号1。同时,第一驾驶员辅助系统14的雷达传感器16检测实际运动方向18,其中,然后在电子控制设备8中产生实际运动方向信号20并与目标运动方向信号1进行比较。如果所述比较现在得出显著偏差,则这表明电动转向装置的功能故障,紧接着产生功能故障信号22。
[0068]
作为安全措施,功能故障信号22在此触发例如借助行车制动器自动制动车辆,直到车辆的静止状态为止。在确定车辆的静止状态时,然后激活车辆的驻车制动器,以便确立车辆的安全状态。该措施的背景是,具有有缺陷的电动转向装置的车辆不再能够进行转向并且因此必须尽可能快地转移到安全状态中。
[0069]
示例2
[0070]
如果具有电动辅助转向的车辆将由第一驾驶员辅助系统6(例如,车道保持辅助)受控地、例如笔直地在直线车道内驾驶,则第一驾驶员辅助系统6预先给定目标运动方向信号1。同时,第一驾驶员辅助系统14的雷达传感器16检测实际运动方向18,其中,然后在电子控制设备8中产生实际运动信号20并将其与目标运动方向信号1进行比较。如果所述比较现在得出显著偏差,则这表明车辆非期望的偏离了由第一驾驶员辅助系统6预先给定的直线运动轨迹并且因此可以推断出电动转向装置的功能故障,如果例如通过测试可以排除例如车道保持辅助功能故障。因此,产生功能故障信号。
[0071]
作为安全措施,功能故障信号在此触发例如完全关闭电动辅助转向装置(“故障沉默”)。因为驾驶员可以继续地通过在方向盘2与转向轮10之间的不受错误影响的机械连接而将车辆保持在直线车道内,从而由此不产生危险情况。
[0072]
附图标记列表
[0073]1ꢀꢀꢀꢀ
目标运动方向
[0074]2ꢀꢀꢀꢀ
方向盘
[0075]4ꢀꢀꢀꢀ
方向盘传感器或方向盘扭矩传感器
[0076]6ꢀꢀꢀꢀ
第二驾驶员辅助系统
[0077]8ꢀꢀꢀꢀ
电子控制设备
[0078]
10
ꢀꢀꢀ
转向轮
[0079]
12
ꢀꢀꢀ
电动转向致动器
[0080]
14
ꢀꢀꢀ
第一驾驶员辅助系统
[0081]
16
ꢀꢀꢀ
环境传感器装置
[0082]
18
ꢀꢀꢀ
实际运动方向
[0083]
20
ꢀꢀꢀ
实际运动方向信号
[0084]
22
ꢀꢀꢀ
功能故障信号
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1