一种脚踏交通工具控制方法及装置与流程
1.本技术涉及交通工具设备控制领域,具体是一种脚踏交通工具控制方法及装置。
背景技术:
2.交通工具有多种,有一类交通工具是人体站立脚踏在上面运动的,称为脚踏交通工具,例如滑板,轮滑,平衡车等,包括各种人力的和机动的,因为具有体积小重量轻的特点,给人们生活带来方便和乐趣,这些种类的交通交通工具的方向和前进后退的控制方法多种多样,人体对于设备的控制有很多方法,四轮滑板用人体相对于前进方向的横向摇摆,用脚部脚踏滑板左右倾斜并通过机械结构实现转向,电动四轮滑板用手持的遥控器控制亲近后退,两轮电动平衡车用人体两个腿部膝盖部位左右推动控制杆控制电动平衡车的转向,还有人体用手操作相关按钮通过拉线连接脚踏交通工具控制前进减速,人体用手操作有线或无线遥控器来控制脚踏交通工具等,各种控制方法各有优缺点,针对不同脚踏交通工具应该有不同的控制方法,人体还有很多可以控制设备的方法,需要开发利用,以可靠实现更多功能。
技术实现要素:
3.本技术的目的是在于提供一种脚踏交通工具控制方法及装置,使人体能够用更多的方法控制脚踏交通工具,可靠实现更多的功能。
4.一种脚踏交通工具控制方法,人体脚部通过脚部固定元件固定于所述脚踏交通工具上,利用人体小腿部与所述脚踏交通工具之间的位置变化控制所述脚踏交通工具的运动,所述人体小腿部包括人体脚踝至膝盖之间的部分。
5.在所述人体脚部的人体小腿部和所述脚踏交通工具之间设置操纵杆,所述操纵杆与所述脚踏交通工具和人体小腿部活动连接,通过人体小腿部的运动带动所述操纵杆运动,所述操纵杆与所述脚踏交通工具的转向装置机械连接,控制所述脚踏交通工具的转向,或所述操纵杆与所述脚踏交通工具的电动控制装置连接,控制所述脚踏交通工具的前进,后退和转向之中至少一个项目。
6.所述一种脚踏交通工具控制方法,人体脚部通过所述脚踏交通工具的脚部固定元件固定于所述脚踏交通工具上运动,所述操纵杆可以与所述脚部固定元件集成为一体,通过所述脚部固定元件代替所述操纵杆,例如所述脚部固定元件与人体脚部和所述脚踏交通工具活动连接,所述脚部固定元件同时具有固定人体脚部和代替操纵杆的作用。
7.一种脚踏交通工具控制装置,包括操纵杆,所述操纵杆两端分别与所述脚踏交通工具和人体小腿部之间连接,连接处为活动连接,所述操纵杆具有以下至少一项特征:所述操纵杆具有弹性;所述操纵杆可以伸缩;所述操纵杆与所述脚踏交通工具和人体小腿部活动连接,所述活动连接包括转动铰接和滑动铰接其中至少一项;所述转动铰接例如所述操纵杆端部通过转轴铰接或万向球
头铰接等,所述转动铰接可以实现所述操纵杆的单向或多向的活动,所述滑动铰接例如所述连接杆端部穿过滑环运动的铰接或所述操纵杆端部沿滑轨运动的铰接等,所述滑动铰接可以实现所述操纵杆在所述脚踏交通工具和人体小腿部之间的长度调节或脱离,所述操纵杆用于脚踏脚踏工具的前进,后退和转向之中至少一个项目控制。
8.一种电动轮滑装置,包括电源,踏板,控制器,倾倒断电保护装置,接地元件和脚部固定元件,所述电源连接所述控制器,所述接地元件设置在所述踏板下部并连接所述控制器,所述接地元件可以为车轮和履带等,所述脚部固定元件设置在所述踏板上部并直接或间接地固定所述电动轮滑装置于人体脚部,直接固定例如所述电动轮滑装置直接固定人体脚部或所述电动轮滑装置的所述踏板与所述脚部固定元件一体形成鞋的形状,间接固定例如人体脚部穿有鞋,所述脚部固定元件通过固定鞋来固定脚部,所述控制器设置所述踏板下面,也可以与所述电源一起设置在人体腰部,所述倾倒断电保护装置与控制器连接或直接与所述电源连接,在所述电动轮滑装置倾倒为设定状态的时候,通过所述控制器可以停止所述接地元件的运动,直接与所述电源连接可以切断所述电源,所述电动轮滑装置还包括上述所述的操纵杆,所述操纵杆在与所述电动轮滑装置的连接端与位移传感器连接,所述位移传感器用于检测所述操纵杆相对于所述电动轮滑装置之间的位移,所述位移传感器连接控制器,所述位移包括距离变化和角度变化至少其中一项,至少所述电动轮滑装置的电源设置在人体腰部或背部,所述电源设有电源总开关。
9.所述的一种电动轮滑装置还包括所述的操纵杆,所述操纵杆连接在人体小腿部与所述电动轮滑装置之间,并且与所述人体小腿部和与所述电动轮滑装置活动连接,所述操纵杆可以设置在所述踏板后部向上靠近人体小腿后部位置,即脚后跟的位置,也可以设置所述操纵杆在人体小腿部内侧或外侧的位置,所述操纵杆在与所述电动轮滑装置的连接端与位移传感器连接,当所述操纵杆在人体小腿部带动下移动带动所述位移传感器移动,所述位移传感器与所述控制器连接,所述控制器根据所述位移传感器的信号控制所述接地元件运动,所述控制器根据所述位移传感器的信号比例控制所述接地元件,即所述位移传感器的信号数值绝对值与所述接地元件的驱动力大小为比例关系,所述位移传感器可以为内部无机械接触的角位移传感器,所述操纵杆与所述位移传感器之间的连接可以机械调节,以变化所述操纵杆在合适的位置适合人体使用,也可以通过在所述控制器里面的程序调节设置所述位移传感器的信号调节驱动所述接地元件,所述操纵杆可以为具有一定弹性,所述操纵杆发生弹性形变的力量设置为不影响与所述操纵杆连接的位移传感器运动。
10.所述的一种电动轮滑装置,至少所述的电源设置在人体腰部或背部,所述电源设有电源总开关,还可以设置usb接口等,方便与其他设备共用电源。
11.所述的接地元件为两个或两个以上相对于所述的电动轮滑装置前进后退方向设置的车轮,或所述的接地元件为至少一套相对于所述的电动轮滑前进后退方向设置的履带装置,或所述的接地元件为具有车轮和履带装置的混合装置,所述车轮和履带装置内有电动装置,能够驱动所述的电动轮滑能够前进后退。
12.所述的接地元件为两个或两个以上相对于所述的电动轮滑装置前进后退方向设置的车轮,仅在所述电动轮滑装置靠近前进方向前端的车轮内设有电机。
13.所述电动轮滑装置还设有离地检测装置,所述离地检测装置与所述控制器连接,检测所述电动轮滑装置是否离开地面和所述电动轮滑装置与地面之间的距离至少其中一
项;所述离地传感器可以采用设置在车轮或踏板等位置的压力传感器或光电传感器等,所述离地传感器可以与所述倾倒断电保护装置共享及信号。
14.一种电动轮滑系统,包括第一电动轮滑装置和第二电动轮滑装置,所述第一电动轮滑装置和第二电动轮滑装置为根据前述任一所述的电动轮滑装置;所述第一电动轮滑装置和第二电动轮滑装置的电源独立或共享,共享即互相并联。
15.一种电动轮滑系统的控制方法,所述第一电动轮滑装置固定于人体左脚,所述第二电动轮滑装置固定于人体右脚,所述第一电动轮滑装置依靠左脚人体小腿部相对于所述电动轮滑装置前后运动,带动所述第一电动轮滑装置的操纵杆的与人体小腿部操作杆连接端运动,所述位移传感装置检测所述操纵杆与所述第一电动轮滑装置连接端运动,检测运动位移并发生信号给所述控制器,所述控制器根据信号控制所述接地元件运动,带动所述第一电动轮滑装置运动,所述第一电动轮滑装置依靠左脚带动离开地面,所述离地检测装置输出信号给所述控制器,所述控制器依据信号控制所述接地元件在所述第一电动轮滑装置离开地面期间的运动,相同控制方法适用于所述第二电动轮滑装置。
16.所述的一种电动轮滑系统的控制方法,所述控制器控制所述接地元件的运动,人体小腿部相对于所述电动轮滑装置向前运动带动所述电动轮滑装置的所述操纵杆向前运动,所述控制器控制接地元件向前运动,人体小腿部相对于所述电动轮滑装置向后运动带动所述电动轮滑装置的所述操纵杆向后运动,所述控制器控制所述接地元件减速或向后运动;在所述第一电动轮滑装置依靠人体左脚带动离开地面的时候,人体依靠右脚和所述第二电动轮滑装置接地运动,所述第一电动轮滑装置的控制器接收所述第一电动轮滑装置的离地检测装置的信号,控制所述第一电动轮滑装置的接地元件按照现有人体运动速度运动,现有人体运动速度与所述第二电动轮滑装置接地速度相同;相同原理,在所述第二电动轮滑装置依靠人体右脚带动离开地面的时候,人体依靠左脚和所述第一电动轮滑装置接地运动,所述第二电动轮滑装置的控制器接收所述第二电动轮滑装置的离地检测装置的信号,控制所述第二电动轮滑装置的接地元件按照现有人体运动速度运动,现有人体运动速度与所述第一电动轮滑装置接地速度相同。
17.本技术的有益效果在于:采用本技术所述的一种脚踏交通工具控制方法及装置,提供了对于脚踏交通工具新的控制方法和装置,克服了用手控制的不方便性,适合多种脚踏交通工具,控制方法与人体自然运动习惯向符合,可靠安全。
附图说明
18.图1为本技术的一种脚踏交通工具控制装置实施例1示意图。
19.图2为本技术的一种脚踏交通工具控制装置实施例2示意图。
20.图3为本技术的一种脚踏交通工具控制装置实施例3示意图。
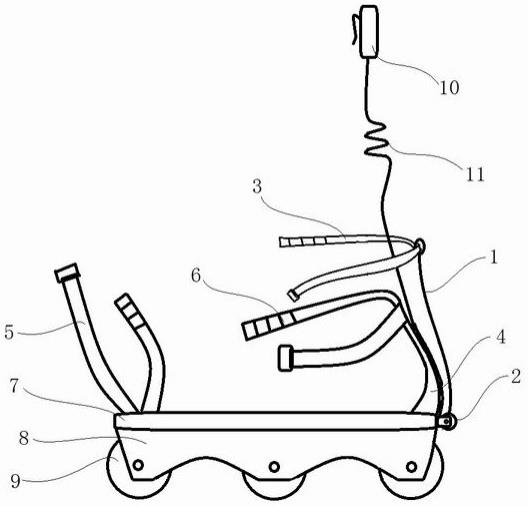
21.图4为本技术的一种电动轮滑装置示意图。
22.图5为本技术的一种电动轮滑系统示意图。
23.图6为本技术的一种电动滑板示意图。
24.图中1-操纵杆,2-操纵杆连接端,3-操纵杆固定带,4-后挡板,5-前固定带,6-后固定带,7-踏板,8
‑‑
支架,9-车轮,10-电源,11-电源线,12-控制盒,13-副操纵杆,14-挡块。
具体实施方式
25.下面结合具体实施例,进一步阐述本技术,图1为本技术的一种脚踏交通工具控制装置实施例1示意图,图中1为操纵杆,具有弹性不容易拉断,2为操纵杆连接端,与所述脚踏交通工具活动连接,3为操纵杆固定带,设有粘扣,穿过操纵杆1上端的孔,可以捆绑在人体小腿部。
26.图2为本技术的一种脚踏交通工具控制装置实施例2示意图,图中1为操纵杆,为套筒状可以伸缩,操纵杆活动的时候长度具有一定变化,方便使用,2为操纵杆连接端,与所述脚踏交通工具活动连接,3为操纵杆固定带,设有粘扣,穿过操纵杆1上端的孔,可以捆绑在人体小腿部。
27.图3为本技术一种脚踏交通工具控制装置实施例3示意图,图中1为操纵杆,具有弹性不容易拉断,2为操纵杆连接端,与所述脚踏交通工具活动连接,3为操纵杆固定带,设有粘扣,穿过操纵杆1上端的孔,可以捆绑在人体小腿部,13为副操纵杆,操纵杆1与通过所述操纵杆连接端2与所述脚踏交通工具活动连接,并以此带动副操纵杆13运动,副操纵杆13连接所述脚踏交通工具内部的位移传感器连接,通过副操纵杆13 可以连接所述脚踏交通工具内部的位移传感器。
28.图4为本技术的一种电动轮滑装置示意图,图中10为电源,所述电源10设有电源总开关和挂扣,所述电源10通过所述挂扣设置在人体腰部,所述电源10通过电源线11经过后挡板4连接所述电动轮滑装置的控制器,所述控制器设置在踏板7下面,所述踏板7上表面设有前固定带5,后固定带6和后挡板4,所述后固定带6设置在所述后挡板4上端,所述前固定带5和所述后固定带6设有粘扣,所述前固定带5固定人体脚部的前端,人体脚部后跟靠近所述后挡板4内部,所述脚部固定元件前固定带5,后固定带6和后挡板4限位固定人体的脚部,所述踏板7通过支架8连接所述接地元件车轮9,车轮9 与所述控制器连接,车轮9为沿着所述电动轮滑装置前进后退方向纵向排列,至少其中一个车轮为电动车轮,所述电动车轮与所述控制器电连接,在所述踏板7后面靠近后挡板4的位置设置操纵杆1,所述操纵杆1与所述电动轮滑装置连接处为操纵杆连接端2,在所述操纵杆连接端2处所述操纵杆1与角位移传感器连接,所述角位移传感器与所述控制器电连接,在所述操纵杆1上端设有操纵杆固定带3,所述操纵杆固定带3与人体小腿部连接,所述控制器设置在所述踏板7的下表面,所述控制器还设有倾倒断电保护装置,当所述电动轮滑装置倾倒超过设定角度,通过所述控制器可以停止所述接地元件即车轮9的运动,或直接与所述电源连接可以切断所述电源,在所述踏板7下表面还设有离地传感器,采用片式压力传感器,所述片式压力传感器与所述控制器连接,所述片式压力传感器检测所述踏板受力变形输出信号给所述控制器,所述控制器根据信号控制所述车轮9的运动,在人体使用所述电动轮滑装置过程中,所述电动轮滑装置的所述操纵杆1因为人体小腿部相对于所述电动轮滑装置前后运动而带动所述操纵杆1产生前后运动,所述操纵杆1带动所述角位移传感器转动,输出信号给所述控制器,与人体小腿运动方向相同的方法,当人体小腿向前运动带动所述操纵杆1向前运动,所述角位移传感器输出信号给所述控制器,控制所述车轮9和所述电动轮滑装置向前运动,反之减速或向后运动。
29.所述片式压力传感器因此产生变形而输出电信号至所述控制器,所述控制器依据此电信号控制所述车轮9在所述电动轮滑装置在离地过程中的运动,即按照现有人体运动
速度转动,在所述踏板7四周设有灯光,与所述电源10电连接,用于照明和指示。
30.图5为本技术的一种电动轮滑系统示意图,所述一种电动轮滑系统包括两个图4中所述的电动轮滑装置,所述两个电动轮滑装置分别固定于人体左右脚,设置在人体左脚的为第一电动轮滑装置,设置在人体右脚的为第二电动轮滑装置,所述第一电动轮滑装置和第二电动轮滑装置可以同时接地运动,依靠所述操纵杆1和控制器驱动所述车轮9转动,实现前后运动,依靠两个所述电动轮滑装置不同的速度实现转向;所述第一电动轮滑装置和第二电动轮滑装置可以轮流离地运动,即人体两只脚轮流带动所述第一电动轮滑装置和第二电动轮滑装置离开地面,例如所述第一电动轮滑装置在左脚的带动下离开地面,人体依靠右脚固定的所述第二电动轮滑装置而前进或后退,当所述第一电动轮滑装置在左脚的带动下接触地面,人体依靠左脚固定的所述第一电动轮滑装置而前进或后退,根据本技术上述的控制使用方法,即:所述的一种电动轮滑系统的控制方法,所述控制器控制所述接地元件的运动,在所述第一电动轮滑装置依靠人体左脚带动离开地面的时候,人体依靠右脚和所述第二电动轮滑装置接地运动,所述第一电动轮滑装置的控制器接收所述第一电动轮滑装置的离地检测装置的信号,控制所述第一电动轮滑装置的接地元件按照现有人体运动速度运动,现有人体运动速度与所述第二电动轮滑装置接地速度相同;相同原理,在所述第二电动轮滑装置依靠人体右脚带动离开地面的时候,人体依靠左脚和所述第一电动轮滑装置接地运动,所述第二电动轮滑装置的控制器接收所述第二电动轮滑装置的离地检测装置的信号,控制所述第二电动轮滑装置的接地元件按照现有人体运动速度运动,现有人体运动速度与所述第一电动轮滑装置接地速度相同;因此人体带动离开地面的所述电动轮滑装置,不再按照接触地面的时候使用所述电动轮滑的操纵杆1带动所述角位移传感器输出的信号运动,这样就不会因为离开地面的脚部的动作导致所述电动轮滑装置的车轮9在离地期间发生错误超速转动和报警,本发明的一种电动轮滑系统电源,包括两个所述第一电动轮滑装置和第二电动轮滑装置各自的电源10,每个所述电源11设有电源总开关,每个所述电源10通过所述电源线11连接所述第一电动轮滑装置和第二电动轮滑装置,在所述第一电动轮滑装置和第二电动轮滑装置的所述电源10之间设有并联线,所述并联线可以插拔,所述并联线把所述第一电动轮滑装置和第二电动轮滑装置的所述电源10内部的电芯并联,这样设置可以保证所述第一电动轮滑装置和第二电动轮滑装置共享两者的所述电源10,给予平衡的供电。
31.图6为本技术的一种电动滑板示意图,图中1为操纵杆,2为操纵杆连接端,3为操纵杆固定带,7为踏板,9为车轮,12为控制盒, 14为挡块,在本实施例中操纵杆1通过操纵杆连接端2活动连接踏板7,在所述操纵杆连接端2连接位移传感器,可以采用角位移传感器或电位器等,位移传感器与所述踏板7下的控制盒12 内的控制器电连接,所述控制盒内设置电源,所述控制器连接电源和车轮9,所述车轮9为电动车轮,设置在踏板7下,所述位移传感器至少能够与操纵杆1一起沿着所述电动滑板前进后退方向转动,人体脚部脚踏在所述踏板7上,人体小腿部与操作杆固定带3连接绑定,所述操纵杆固定带3与操作杆1连接可以沿着操纵杆1上下滑动,在人体需要离开所述电动滑板的时候,所述操纵杆固定带3能够从所述操作杆1上端滑出,在所述操纵杆1设挡块14,限定所述操纵杆固定带3的位置,在人体使用所述电动滑板过程中,人体脚部脚踏在所述踏板7上,人体小腿部运动带动操作杆固定带3运动,并带动所述角位移传感器转动,例如带动电位器的旋钮或摇柄转动,输出信号给所述控
制器,所述控制器控制所述车轮9和所述电动滑板的运动,所述操纵杆1的运动方向与所述电动滑板运动方向一致,所述操纵杆可以设置有回正装置,例如设置弹簧回正,本技术的一种电动滑板依靠人体脚部作用于踏板7,使踏板7左右倾斜连接并带动车轮9转向,其为现有常用技术,在此不再描述,本实施例的使用方法可以人体双脚站立在所述电动滑板上使用,或者一只脚站立在所述电动滑板上而另一只脚蹬踏地面助力使用。
32.在上述各种本技术的实施例中,仅通过所选的实施例对本技术进行了说明,例如图4中的所述车轮也可以为2个或4个,图4中的所述车轮也可以增加直径设置在所述踏板两侧,图6中的所述车轮也可以为3个,即图中两个车轮轴其中一个只有一个所述车轮,实施例6的操纵杆还可以采用实施例1,实施例2和实施例3中的装置,上述的实施例用于说明而不是用于限定本技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1