起重机上自动调平装置的制作方法
[0001]
本实用新型属于起重机应用领域,特别关于一种起重机上自动调平装置。
背景技术:
[0002]
现有技术中,起重机往往用来吊运大吨量的器材,而在吊运过程中必须要保证两个吊钩保持平衡,否则一旦有一侧吊钩倾斜则易有滑落的危险,造成器材损坏和严重的人员安全问题。一般的人工靠视觉调平不靠谱,而采用一般的水平传感器等手段还是需要操作人员手动操作,费时费力。
技术实现要素:
[0003]
本实用新型的目的是提供一种结构简单、设计巧妙、能够快速精确调平吊钩、省时省力的起重机上自动调平装置。
[0004]
为达成上述目的,本实用新型采用如下技术方案:一种起重机上自动调平装置,其特征在于:其包括有第一起升机构、第一吊钩、第一绝对值编码器、第二起升机构、第二吊钩、第二绝对值编码器和控制器,
[0005]
所述第一起升机构分别与所述控制器和第一绝对值编码器相连接,所述第一起升机构带动所述第一吊钩上升或下降,所述第二起升机构分别与所述控制器和第二绝对值编码器相连接,所述第二起升机构带动所述第二吊钩上升或下降,
[0006]
所述第一绝对值编码器实时检测所述第一吊钩的高度信号,并将高度信号输送给所述控制器,所述第二绝对值编码器实时检测所述第二吊钩的高度信号,并将高度信号输送给所述控制器,
[0007]
所述控制器根据所述高度信号计算所述第一吊钩和所述第二吊钩的高度差,获得定点高度,所述控制器根据所述定点高度调整所述第一吊钩和第二吊钩的运动高度。
[0008]
优选地,所述第一吊钩和第二吊钩相向而行经过相同或不同的运动高度到达定点高度后,所述第一吊钩和第二吊钩处于同一水平高度,并进入联动状态。
[0009]
更优选地,所述定点高度为自较低吊钩向上的三分之一高度差距离的高度。
[0010]
优选地,所述第一起升机构包括有第一电机和第一卷筒,所述第一电机带动所述第一卷筒正反转,所述第一卷筒与所述第一吊钩相连并带动所述第一吊钩升降,
[0011]
所述第二起升机构包括有第二电机和第二卷筒,所述第二电机带动所述第二卷筒正反转,所述第二卷筒与所述第二吊钩相连并带动所述第二吊钩升降。
[0012]
更优选地,所述第一绝对值编码器与所述第一卷筒相连,所述第一绝对值编码器检测第一卷筒的卷绕位移,并将位移信号输送给所述控制器,所述第二绝对值编码器实时检测所述第二卷筒的卷绕位移,并将位移信号输送给所述控制器,
[0013]
所述控制器根据所述位移信号得到所述第一吊钩与第二吊钩的高度信号,通过计算所述第一卷筒和第二卷筒的位移差,获得第一吊钩和第二吊钩的高度差,从而确定所述定点高度,所述控制器根据所述定点高度调整所述第一卷筒和第二卷筒的卷绕长度,使得
所述第一吊钩与第二吊钩都运动至所述定点高度。
[0014]
优选地,其还包括有调平按钮,所述调平按钮设置于起重机上的司机室,所述调平按钮为启动按钮,其控制两个起升机构自动进入联动调平状态。
[0015]
更优选地,其还包括有第一制动器和第二制动器,
[0016]
所述第一制动器设置于所述第一卷筒上控制所述第一卷筒制动的开关,
[0017]
所述第二制动器设置于所述第二卷筒上控制所述第二卷筒制动的开关。
[0018]
更优选地,其还包括有制动按钮,所述制动按钮设置于起重机上的司机室,其控制两个制动器进入制动状态,停止两个卷筒的工作。
[0019]
与现有技术相比,本实用新型具有如下有益效果:
[0020]
1.结构简单、设计巧妙,便于工业制造和大范围推广使用。
[0021]
2.一键调平,方便操作,使得调平的步骤简化。
[0022]
3.采用绝对值编码器测量吊钩高度,再用控制器调节吊钩高度,无需人工观察,调平更精准。
[0023]
4.调平高度位于高度差从下向上三分之一的高度,定点高度设计更合理,向下的吊钩靠自重走得快多走一些距离,向上的吊钩走得慢少走一些距离。
[0024]
5.依靠定点高度的设计,更加节省能耗,降低整体的生产成本。
附图说明
[0025]
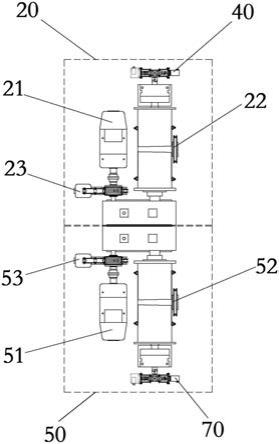
图1为本实用新型起重机上自动调平装置的结构示意图。
[0026]
图2为图1俯视方向的结构示意图。
[0027]
图3为本实用新型起重机上自动调平装置的工作原理结构示意图。
[0028]
附图标记:第一起升机构20、第一吊钩30、第一绝对值编码器40、第二起升机构50、第二吊钩60、第二绝对值编码器70、控制器80、第一电机21、第一卷筒22、第二电机51、第二卷筒52、第一制动器23、第二制动器53、调平按钮90a、制动按钮90b。
具体实施方式
[0029]
为进一步阐述本实用新型所采用的技术手段和达到的技术效果,以下结合附图和实施例做详细说明。
[0030]
参考图1至图3,本实用新型提供了一种起重机上自动调平装置,其包括有第一起升机构20、第一吊钩30、第一绝对值编码器40、第二起升机构50、第二吊钩60、第二绝对值编码器70、控制器80、调平按钮90a和制动按钮90b。
[0031]
一个实施例中,参考图1和图2,所述第一起升机构分别与所述控制器和第一绝对值编码器相连接,所述第一起升机构带动所述第一吊钩上升或下降。所述第二起升机构分别与所述控制器和第二绝对值编码器相连接,所述第二起升机构带动所述第二吊钩上升或下降。
[0032]
所述第一绝对值编码器实时检测所述第一吊钩的高度信号,并将高度信号输送给所述控制器;所述第二绝对值编码器实时检测所述第二吊钩的高度信号,并将高度信号输送给所述控制器。
[0033]
所述控制器根据所述高度信号计算所述第一吊钩和所述第二吊钩的高度差,获得
定点高度,所述控制器根据所述定点高度调整所述第一吊钩和第二吊钩的运动高度。
[0034]
在一个实施例中,所述第一吊钩和第二吊钩相向而行经过相同或不同的运动高度到达定点高度后,所述第一吊钩和第二吊钩处于同一水平高度,并进入联动状态。
[0035]
在一个实施例中,所述定点高度为自较低吊钩向上的三分之一高度差距离的高度。
[0036]
参考图3,所述第一起升机构包括有第一电机和第一卷筒,所述第一电机带动所述第一卷筒正反转,所述第一卷筒与所述第一吊钩相连并带动所述第一吊钩升降,
[0037]
所述第二起升机构包括有第二电机和第二卷筒,所述第二电机带动所述第二卷筒正反转,所述第二卷筒与所述第二吊钩相连并带动所述第二吊钩升降。
[0038]
所述第一绝对值编码器与所述第一卷筒相连,所述第一绝对值编码器检测第一卷筒的卷绕位移,并将位移信号输送给所述控制器,所述第二绝对值编码器实时检测所述第二卷筒的卷绕位移,并将位移信号输送给所述控制器,
[0039]
所述控制器根据所述位移信号得到所述第一吊钩与第二吊钩的高度信号,通过计算所述第一卷筒和第二卷筒的位移差,获得第一吊钩和第二吊钩的高度差,从而确定所述定点高度,所述控制器根据所述定点高度调整所述第一卷筒和第二卷筒的卷绕长度,使得所述第一吊钩与第二吊钩都运动至所述定点高度。
[0040]
所述第一起升机构和所述第二起升机构还包括有第一制动器和第二制动器,所述第一制动器设置于所述第一卷筒上控制所述第一卷筒制动的开关,所述第二制动器设置于所述第二卷筒上控制所述第二卷筒制动的开关。
[0041]
在一个实施例中,所述调平按钮设置于起重机上的司机室,所述调平按钮为启动按钮,其控制两个起升机构自动进入联动调平状态。
[0042]
所述制动按钮设置于起重机上的司机室,其控制两个制动器进入制动状态,停止两个卷筒的工作。
[0043]
上文对本实用新型进行了足够详细的具有一定特殊性的描述。所属领域内的普通技术人员应该理解,实施例中的描述仅仅是示例性的,在不偏离本实用新型的真实精神和范围的前提下做出所有改变都应该属于本实用新型的保护范围。本实用新型所要求保护的范围是由所述的权利要求书进行限定的,而不是由实施例中的上述描述来限定的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1