剑栅输送设备及用于双侧板链精密传动的周期清零方法与流程
1.本发明涉及一种剑栅输送装置,更具体地说,它涉及一种剑栅输送设备及用于双侧板链精密传动的周期清零方法。
背景技术:
2.在连续滚动送料的设备中,尤其是精密滚动剑栅输送的设备中,系统往往具备两侧的封闭式板链,之后两侧的板链具有剑栅进行连接。以72个板链为例,两侧都具有72个板链,同时将有72个剑栅连接在两侧的72个板链上。运动的目的是72个剑栅在72个板链的带动下位置同步的走过板链的工作区(一般是上表面或者下表面)。由于机械传动的累计误差,在即使最初达到位置和速度同步运行状态之后,经历了多次循环后,累计误差越来越多,仍会导致两侧的运动在位置上并不同步,最终使两侧的板链形成位置差异,造成连接两侧板链的剑栅损坏。同时,在任意时刻,让控制系统获知任意剑栅n所在位置,在正确的时间点上,对齐实施运动控制。对于很多应用环节,都具有重要作用。
技术实现要素:
3.针对现有技术存在的不足,本发明的一个目的在于提供一种剑栅输送设备,具有保证两侧的板链同步运动的效果。
4.为实现上述技术目的,本发明提供了如下技术方案:一种剑栅输送设备,包括两圈构成闭环的板链,以及动力机构,所述动力机构能带动板链循环往复运动,两圈所述板链间固定设置有多根用于输送物料的剑栅,每圈所述板链上方平行设置有一条磁栅尺,每圈所述板链上设置有三个读数头,位于上方的所述读数头被磁栅尺感应,三个所述读数头沿板链周向三等分板链,每个所述读数头与另一圈上的一个读数头对齐。
5.通过采用上述技术方案,动力机构带动两圈板链同时转动,实现剑栅的转动来运输物料,每圈板链的三个读数头跟随板链转动,当一个读数头移动到上半圈并位于磁栅尺的正下方时,磁栅尺可以检测到读数头的位置,将两圈板链上被检测到的读数头位置进行比对,即可知道两圈板链的步进误差,控制器算出需要调整的数值,控制对应的动力机构加速或降速,保证两圈板链一直处于平行状态,防止了剑栅损坏。
6.作为优选,每圈所述板链包括上部板链、下部板链和两个半圆形板链,所述磁栅尺的长度大于上部板链的长度。
7.通过采用上述技术方案,每圈板链的三个读数头始终至少有一个处于上部板链上,实现了任意时刻,控制系统可以获知任意剑栅所在的位置,提高了对剑栅的控制精度。
8.作为优选,所述动力机构包括驱动滚轮和支撑定位滚轮,所述驱动滚轮设置在每圈板链的内侧面上,所述板链的两个半圆形板链内侧设置有滚轮滑道,所述支撑定位滚轮沿滚轮滑道循环滑动,所述驱动滚轮通过凸轮轴机构驱动,所述凸轮轴机构传动件为共轭凸轮,共轭凸轮与驱动滚轮无间隙啮合。
9.通过采用上述技术方案,通过驱动滚轮来带动板链循环运动,同时支撑定位滚轮
用于撑起半圆形板链,保证了板链的正常转动。
10.作为优选,所述动力机构包括两组以板链中心点中心对称的驱动滚轮,每组所述凸轮轴机构通过伺服电机驱动自转。
11.针对现有技术存在的不足,本发明的另一个目的在于提供一种用于双侧板链精密传动的周期清零方法,具有保证两侧的板链同步运动的效果。
12.为实现上述技术目的,本发明提供了如下技术方案:一种用于双侧板链精密传动的周期清零方法,包括如下步骤:
13.s1.启动动力机构,带动两圈板链循环运动,物料被剑栅带动并前进;
14.s2.对应的两个读数头分别跟随一圈板链运动到上部板链,两个磁栅尺分别感应到读数头,控制器根据两个读数头相对磁栅尺所处的位置,算出两个读数头的位置偏差;
15.s3.控制器根据板链的当前移动速度和两个读数头的位置偏差值,算出板链的移速调整数值;
16.s4.控制器将对应动力机构的功率调整,使两个读数头位置对应,再将动力机构的功率回复到工作值;
17.s5.下一组读数头移动到上部板链,再次读取两个读数头的位置偏差,并实时调整。
18.综上所述,本发明取得了以下效果:
19.1.在双侧板链传动的每一侧,都带有一条磁栅尺,板链上带有3个读数头,可以确保每时每刻至少有一个读数头在磁栅尺范围内。两侧的板链通过对比磁栅尺读数获知二者的位置误差,每一个循环进行一次位置误差清零。
20.2.每一侧板链通过磁栅尺范围内的读数头,都获知该读数头的位置,进而获知整个循环系统中,各个剑栅所在板链循环系统中的相对位置。
附图说明
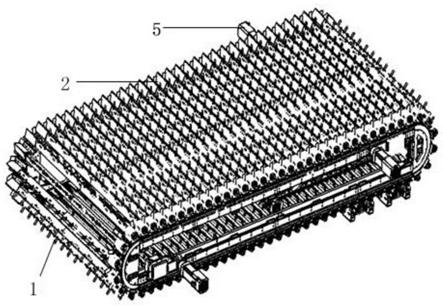
21.图1为本实施例中用于表现整体结构的示意图;
22.图2为本实施例中用于表现磁栅尺和读数头配合关系的示意图。
23.图中,1、板链;2、剑栅;3、磁栅尺;4、读数头;5、动力机构。
具体实施方式
24.以下结合附图对本发明作进一步详细说明。
25.本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
26.实施例:一种剑栅输送设备,如图1和图2所示,包括两圈构成闭环的板链1,以及动力机构5,所述动力机构5能带动板链1循环往复运动,两圈所述板链1间固定设置有多根用于输送物料的剑栅2,每圈所述板链1上方平行设置有一条磁栅尺3,每圈所述板链1上设置有三个读数头4,位于上方的所述读数头4被磁栅尺3感应,三个所述读数头4沿板链1周向三等分板链1,每个所述读数头4与另一圈上的一个读数头4对齐。
27.动力机构5带动两圈板链1同时转动,实现剑栅2的转动来运输物料,每圈板链1的
三个读数头4跟随板链1转动,当一个读数头4移动到上半圈并位于磁栅尺3的正下方时,磁栅尺3可以检测到读数头4的位置,将两圈板链1上被检测到的读数头4位置进行比对,即可知道两圈板链1的步进误差,控制器算出需要调整的数值,控制对应的动力机构5加速或降速,保证两圈板链1一直处于平行状态,防止了剑栅2损坏。
28.如图2所示,每圈所述板链1包括上部板链、下部板链和两个半圆形板链,所述磁栅尺3的长度大于上部板链的长度。每圈板链1的三个读数头4始终至少有一个处于上部板链上,实现了任意时刻,控制系统可以获知任意剑栅2所在的位置,提高了对剑栅2的控制精度。
29.所述动力机构5包括驱动滚轮和支撑定位滚轮,所述驱动滚轮设置在每圈板链1的内侧面上,所述板链1的两个半圆形板链内侧设置有滚轮滑道,所述支撑定位滚轮沿滚轮滑道循环滑动,所述驱动滚轮通过凸轮轴机构驱动,所述凸轮轴机构传动件为共轭凸轮,共轭凸轮与驱动滚轮无间隙啮合。通过驱动滚轮来带动板链1循环运动,同时支撑定位滚轮用于撑起半圆形板链,保证了板链1的正常转动。
30.如图1所示,所述动力机构5包括两组以板链1中心点中心对称的驱动滚轮,每组所述凸轮轴机构通过伺服电机驱动自转。
31.一种用于双侧板链精密传动的周期清零方法,包括如下步骤:
32.s1.启动动力机构5,带动两圈板链1循环运动,物料被剑栅2带动并前进;
33.s2.对应的两个读数头4分别跟随一圈板链1运动到上部板链,两个磁栅尺3分别感应到读数头4,控制器根据两个读数头4相对磁栅尺3所处的位置,算出两个读数头4的位置偏差;
34.s3.控制器根据板链1的当前移动速度和两个读数头4的位置偏差值,算出板链1的移速调整数值;
35.s4.控制器将对应动力机构5的功率调整,使两个读数头4位置对应,再将动力机构5的功率回复到工作值;
36.s5.下一组读数头4移动到上部板链,再次读取两个读数头4的位置偏差,并实时调整。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1