用于微纳米粒子分选的声学微流控装置
1.本申请涉及声操控技术领域,尤其涉及一种用于微纳米粒子分选的声学微流控装置。
背景技术:
2.声学微流控(或称声镊)技术是目前研究活跃的交叉学科领域。主要应用于生物医学、化学等方面。声镊能够通过在微纳米尺度的微粒上施加声辐射力,实现对微纳米尺度的微粒分选(如分离或筛选)的操控。
3.相比于光镊来说,由于声镊对传播介质的光透明度没有要求、在单位输入能量下的捕捉力远大于光镊,可以用更低的能量捕捉相同尺寸的微粒,减少对微粒造成损伤的危险或者在相同能量下捕捉更大尺寸的微粒,这些优势使得声学微流控在生物医学领域,尤其在医学诊断中具有重大应用场景。
4.而目前声镊存在分选极限不足(低于1微米难以有效分离),且通量低等问题,严重限制了其应用。因此,如何能提供一种提高粒子捕获或分选能力的声镊是本申请所要解决的技术问题。
技术实现要素:
5.鉴于现有技术的以上问题,本申请提供一种用于微纳米粒子分选的声学微流控装置,以能提高粒子的捕获或分选能力。
6.为达到上述目的,本申请提供了一种用于微纳米粒子分选的声学微流控装置,其特征在于,包括:
7.衬底,衬底上布设有声学激励源阵列,位于声学激励源阵列上方键合有微流道;
8.所述微流道的宽度横跨声学激励源阵列;
9.所述声学激励源阵列包括阵列化排列的多个声学激励源。
10.由上,通过声学激励源阵列,可提高粒子的捕获或分选能力,具体来说:进行粒子捕获时,经过声学激励源阵列各行依次进行多次捕捉,在保证粒子捕捉尺寸的条件下,大大提高了高通量流体环境中粒子的捕捉能力。进行筛分粒子时,可以在固定通量下捕获较大的粒子,使较小的粒子通过,从而实现粒子的筛分。对于多种粒子存在的环境,可以使用多个该装置级联以实现更精确的筛分效果。
11.其中,所述声学激励源阵列中的各声学激励源为矩形阵列结构,每行声学激励源由同一顶电极相连,每列声学激励源由同一底电极相连,各声学激励源位于所述顶电极与底电极交叠处。
12.由上是一种声学激励源阵列的实现结构,结构简单,便于电路布设。
13.其中,所述声学激励源阵列中的任意数量的声学激励源均形成非闭环结构的电路路径。
14.由上,避免了各声学激励源出现的闭环结构,可以有效避免各声学激励源之间的
干扰,且,进一步实现每个位点的声学激励源均可被单独控制并获取等量的功率。
15.其中,各声学激励源由单一的顶电极相连,每个声学激励源与每个单独的底电极相连。
16.由上,是实现避免各声学激励源出现的闭环结构的一种可选的电路路径。由于每个声学激励源与每个单独的底电极相连,可采用单一的顶电极,电路布设方便,供电方便。
17.其中,各声学激励源分为多组,由对应多个顶电极相连;每个声学激励源与每个单独的底电极相连。
18.由上,是实现避免各声学激励源出现的闭环结构的一种可选的电路路径。由于每个声学激励源与每个单独的底电极相连,也可根据电路布设需要采用多组的顶电极。
19.其中,各声学激励源分为多组,由对应多个顶电极相连,每组中的每个声学激励源与每个单独的底电极相连,且一组中的一底电极连接其他组的声学激励源底电极时,形成非闭环结构的电路路径。
20.由上,是实现避免各声学激励源出现的闭环结构的一种可选的电路路径,可根据电路布设需要采用上述方式。
21.其中,所述声学激励源包括:由下至上依次设置的衬底、声学反射层、底电极、压电层和顶电极;其中底电极、压电层和顶电极重叠部分为工作区域。
22.由上,是一种实现声学激励源的具体实施方式,其中声学反射层可为空气腔或布拉格反射层。
23.其中,所述声学激励源阵列中,声学激励源阵列中具有n个声学激励源时,该n个声学激励源的位置关系如下确定:
24.在有所述n个激励源的阵列中,当任意两个声学激励源之间的距离均需要被考虑时,存在n(n
‑
1)/2个距离值,分别编号为d1,d2,
…
d
n(n
‑
1)/2
;对应各下标的距离下的串扰水平记为s21
‑1,s21
‑2,
…
s21
‑
n(n
‑
1)/2
;
25.通过最小化表达式:的取值,确定出一关于n(n
‑
1)/2个距离的约束:f(d1,d2,
…
,d
n(n
‑
1)/2
);
26.利用该约束确定串扰最小下所述n个声学激励源的位置关系;
27.其中,两个声学激励源之间的串扰水平采用下述公式计算:
[0028][0029]
其中:
[0030][0031]
其中:
[0032][0033]
上述公式中的各参数含义具体如下:
[0034]
rs、ro、co是声学激励源电路模型中的电阻和电容;cm、lm、rm是声学激励源电路模型中声学激励源耦合区中的电阻、电容、电感;
[0035]
z0为端口阻抗,是一常量;
[0036]
jω是复频率,其中j为虚数单位;ω为角频率;
[0037]
k为耦合强度,表示耦合模型中左右两个激励源之间耦合的强度,为一个0
‑
1之间的值,与激励源之间相对距离有关;
[0038]
zr是耦合区的特征阻抗,其值等于1/k;
[0039]
z
t
是激励源在不考虑rs下的输入阻抗。
[0040]
由上,可以采用上述方式确定各个声学激励源的位置关系。
[0041]
其中,所述微流道高度位于10微米到10毫米之间;所述声学激励源的谐振频率不低于300mhz。
[0042]
由上,可根据需要设置微流道高度,所述谐振频率的声学激励源可有效生成捕获粒子的涡流。
[0043]
其中,所述压电层为以下之一材料构成:压电陶瓷、氧化锌、氮化铝、铌酸锂或压电石英;所述顶电极和底电极为金属材料构成。
[0044]
本申请的这些和其它方面在以下(多个)实施例的描述中会更加简明易懂。
附图说明
[0045]
以下参照附图来进一步说明本申请的各个特征和各个特征之间的联系。附图均为示例性的,一些特征并不以实际比例示出,并且一些附图中可能省略了本申请所涉及领域的惯常的且对于本申请非必要的特征,或是额外示出了对于本申请非必要的特征,附图所示的各个特征的组合并不用以限制本申请。另外,在本说明书全文中,相同的附图标记所指代的内容也是相同的。具体的附图说明如下:
[0046]
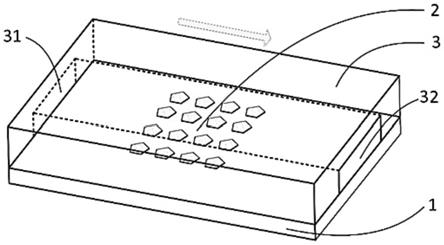
图1a为本申请微纳米粒子分选装置的三维示意图;
[0047]
图1b为本申请声学激励源阵列的工作示意图;
[0048]
图1c为本申请声学激励源涡流捕捉的示意图;
[0049]
图2a为本申请声学激励源阵列第一实施例的示意图;
[0050]
图2b为本申请声学激励源阵列第二实施例的示意图;
[0051]
图2c为本申请声学激励源阵列第三实施例的示意图;
[0052]
图2d为本申请声学激励源阵列第四实施例的示意图;
[0053]
图2e为本申请声学激励源阵列第五实施例的示意图;
[0054]
图2f为本申请声学激励源阵列第六实施例的示意图;
[0055]
图3a为本申请声学激励源结构第一实施例的示意图;
[0056]
图3b为本申请声学激励源结构第二实施例的示意图;
[0057]
图4为本申请声学激励源耦合模型的示意图。
具体实施方式
[0058]
说明书和权利要求书中的词语“第一、第二、第三等”或模块a、模块b、模块c等类似用语,仅用于区别类似的对象,不代表针对对象的特定排序,可以理解地,在允许的情况下
可以互换特定的顺序或先后次序,以使这里描述的本申请实施例能够以除了在这里图示或描述的以外的顺序实施。
[0059]
在以下的描述中,所涉及的表示步骤的标号,如s110、s120
……
等,并不表示一定会按此步骤执行,在允许的情况下可以互换前后步骤的顺序,或同时执行。
[0060]
说明书和权利要求书中使用的术语“包括”不应解释为限制于其后列出的内容;它不排除其它的元件或步骤。因此,其应当诠释为指定所提到的所述特征、整体、步骤或部件的存在,但并不排除存在或添加一个或更多其它特征、整体、步骤或部件及其组群。因此,表述“包括装置a和b的设备”不应局限为仅由部件a和b组成的设备。
[0061]
本说明书中提到的“一个实施例”或“实施例”意味着与该实施例结合描述的特定特征、结构或特性包括在本申请的至少一个实施例中。因此,在本说明书各处出现的用语“在一个实施例中”或“在实施例中”并不一定都指同一实施例,但可以指同一实施例。此外,在一个或多个实施例中,能够以任何适当的方式组合各特定特征、结构或特性,如从本公开对本领域的普通技术人员显而易见的那样。
[0062]
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。如有不一致,以本说明书中所说明的含义或者根据本说明书中记载的内容得出的含义为准。另外,本文中所使用的术语只是为了描述本申请实施例的目的,不是旨在限制本申请。
[0063]
为了准确地对本申请中的技术内容进行叙述,以及为了准确地理解本申请,在对具体实施方式进行说明之前先对本说明书中所使用的术语给出如下的解释说明或定义:
[0064]
1)声学激励源:由高频微型谐振器实现,通过高频声波形成捕获微粒的涡流,即形成声镊。多个按一定规律排列的声学激励源构成声学激励源阵列。
[0065]
2)声学激励源阵列中的闭环结构,指从某声学激励源的一电极出发,在布局好的该阵列中通过该电极、该声学激励源、另一电极为一组,可以与其他组级联组合成的某条路径,可以回到该电极的结构。例如图2a中构成矩形回路的每四个声学激励源及电路构成闭环结构。
[0066]
本申请提供了一种用于微纳米粒子分选的声学微流控装置,可以用于低于1微米粒子分选,高于20微升每分钟流体下粒子分选。下面结合附图对本发明实施例进行详细说明。
[0067]
如图1示出了本申请的用于微纳米粒子分选的声学微流控装置,包括衬底1,衬底1上布设有声学激励源阵列2,位于声学激励源阵列2上方键合有微流道3,所述微流道3的宽度横跨声学激励源阵列2,高度不低于10微米,不高于10毫米。微流道3具有入口31和出口34,以使具有粒子的样品通过。
[0068]
如图1b示出了本申请声学激励源阵列及工作的示意图,声学激励源阵列2是由具有相同结构与谐振频率的若干声学激励源21,通过阵列化结构组合组成,本实施例中声学激励源21的谐振频率不低于300mhz。通过控制声学激励源阵列2的工作模式和功率,可以实现不同的粒子分选能力。如图1b所示,其基本的工作原理是:当声学激励源阵列2中的一个或多个声学激励源21工作时,在工作的声学激励源21周围产生高速涡流流场211,从而实现粒子的捕获与分选。具体的,如图1c示出的本申请声学激励源21涡流捕捉的示意图,在涡流流场211中,流体方向为从衬底1上的声学激励源21主体向上迸射,再向外向下流动,最终回
到声学激励源21,形成闭合的弧线路径。当微流道3中液体样品4中的粒子41被捕获时,粒子41将随涡流流场211中流体运动而运动,即被捕获。
[0069]
本申请的装置当用于进行捕捉粒子时,其工作原理为:含有微粒(尺寸通常为几纳米至几十微米)的流体以一定通量流过微流道中声学激励源阵列所在区域,当激励源阵列开始工作时,第一行(即流体流经的最上游)激励源首先捕捉粒子,未被捕捉或泄露的粒子由第二行激励源再次捕捉,以此类推,直到最后一行(最下游)激励源捕捉最终残余的粒子。该过程在保证粒子捕捉尺寸的条件下,大大提高了高通量流体环境中粒子的捕捉能力。
[0070]
本申请的装置当用于进行筛分粒子时,其工作原理为:在固定通量条件下,对于流体环境中不同尺寸的粒子,上述捕捉过程的效率(稳定条件下单位时间内捕获粒子的数目与总流入粒子数目的比值)存在差异。这种差异体现为半径越小的粒子捕获效率越低,且当通量增大时,这种差异将会变大。因此,利用该特点,可以在固定通量下捕获较大的粒子,使较小的粒子通过,从而实现粒子的筛分。对于多种粒子存在的环境,可以使用多个该装置级联以实现更精确的筛分效果。
[0071]
下面,参照图2a
‑
图2f进一步对本申请的声学激励源阵列的结构进行详细举例说明。
[0072]
如图2a示出了声学激励源阵列的第一实施例,该声学激励源阵列中的各声学激励源被排布为n
×
n(n>1)或者m
×
n(m+n>2)的矩形阵列结构,每行声学激励源21由同一顶电极23相连,每列声学激励源由同一底电极22相连,任意一顶电极23与底电极22均垂直,各声学激励源21位于顶电极23与底电极22交叠处。
[0073]
该第一实施例中,存在闭环结构的电路,例如相邻的四个声学激励源21可形成闭环结构的电路,形成闭环时各声学激励源,例如相邻的声学激励源会存在相互干扰,基于此,提供了进一步改进的声学激励源阵列的结构,下面参见图2b
‑
图2f进行说明。
[0074]
如图2b示出了声学激励源阵列的第二实施例,各声学激励源被排布为n
×
n(n>1)或者m
×
n(m+n>2)的矩形阵列结构,各声学激励源由单一的顶电极23全部相连,而每个声学激励源与每个单独的底电极22相连。第二实施例中,避免了各声学激励源出现的闭环结构,可以有效避免各声学激励源之间的干扰,实现每个位点的声学激励源均可被单独控制并获取等量的功率。不难理解,只要每个声学激励源与每个单独的底电极22相连,并不限制各声学激励源21顶电极23是一个还是多个,但当为相同一个时,布线方便,且供电方便。
[0075]
如图2c
‑
图2e为声学激励源阵列的第三至第五实施例,均与图2b示出了声学激励源阵列的第二实施例类似,各声学激励源由单一的顶电极23全部相连,而每个声学激励源与每个单独的底电极22相连,不再赘述。
[0076]
图2f为声学激励源阵列的第六实施例,该实施例中,由对应多个顶电极相连,每组中的每个声学激励源与每个单独的底电极相连,且一组中的一底电极连接其他组的声学激励源底电极时,形成非闭环结构的电路路径。具体来说,如图2f中,顶电极23连接两个声学激励源,该两声学激励源分别连接用不同的底电极22,以不形成闭环结构的回路。
[0077]
由上,图2b
‑
图2f分别的阵列规模为4
×
4,3
×
3,2
×
4,2
×
2,1
×
2的声学激励源阵列中,均未形成闭环结构的回路,具有可以通过固定的顶底电极组合控制固定位置的声学激励源的特点,从而实现每个位点的声学激励源均可被单独控制。
[0078]
对于声学激励源阵列,需要由与其谐振频率(工作频率)相同的、通断可控的射频
信号予以驱动。其中,本申请各实施例中,声学激励源阵列工作频率不小于300mhz,为其提供可控射频驱动的外部电路主要包括功分器电路,多路选通传输电路,可编程逻辑门电路等。这些电路的实现可依赖于板级传输线电路,包括微带线,悬置线,共面波导,槽线等,亦可依赖于集成电路,包括单片微波集成电路(mmic),超大规模集成电路(vlsi)等。
[0079]
下面,再对本申请的声学激励源的结构进一步进行详细介绍:
[0080]
如图3a示出了本申请声学激励源结构第一实施例,自下而上包括依次连接的衬底1,空气腔25,底电极22,压电层24,顶电极23。如图3b示出了本申请声学激励源结构第二实施例,自下而上包括依次连接的衬底1,布拉格反射层26,底电极22,压电层24,顶电极23。
[0081]
其中,空气腔25与布拉格反射层26均用于实现声学反射层的功能。顶电极23和底电极22分布于压电层24两侧,与压电层24共同构成三明治结构。压电层24可以是压电陶瓷、氧化锌、氮化铝、铌酸锂、压电石英等任何具有压电效应的材料,其厚度决定了谐振频率的大小。顶电极23和底电极22可以为任何金属材料,顶电极23、压电层24和底电极22重叠部分为有效工作区域,该有效工作区域的面积与压电层24厚度共同决定了声学激励源的阻抗。
[0082]
另外,构成声学激励源阵列的各声学激励源尺寸、结构相同,驱动各声学激励源的功率相同,以形成图1b示出的涡流流场分布。
[0083]
同一压电层上的声学激励源之间存在耦合。如图4示出了声学激励源耦合模型示意图,包括:第一声学激励源电路模型41、第二声学激励源电路模型42;第一声学激励源耦合区43、第二声学激励源耦合区44;声学激励源耦合分量45。
[0084]
声学激励源之间耦合由图4,其中主要由参数为lm,cm,rm的器件之间的耦合决定激励源之间的耦合强度k。发生耦合时,一个被使能的声学激励源会引起另一个与其发生耦合的激励源被使能,这种寄生的使能强度主要由耦合强度决定,可以用s21参数描述为:
[0085][0086]
其中:
[0087][0088]
其中:
[0089]
[0090]
其中:
[0091][0092]
上述公式中的各参数含义具体如下:
[0093]
称为abcd矩阵,描述二端口电路的标准方法之一。
[0094]
rs、ro、co、cm、lm、rm;其中的r、c和l分别对应激励源耦合模型里的电阻、电容、电感值。
[0095]
z0为端口阻抗,是一常量。
[0096]
jω是复频率,其中j为虚数单位;ω为角频率,单位rad/s。
[0097]
k为耦合强度,又称为耦合系数(本文称为耦合强度),表示耦合模型中左右两个激励源之间耦合的强度,为一个0
‑
1之间的值,与激励源之间相对距离直接相关。
[0098]
耦合区图4示出的模型中黑色双箭头与k所表述的区域。
[0099]
zr是耦合区的特征阻抗,其值等于1/k。
[0100]
z
t
是激励源在不考虑线阻(即rs)下的输入阻抗。
[0101]
上述公式中,矩阵下标只用于标记该矩阵代表电路中的部分,上标才是对矩阵的操作。其中,smr1代表模型中的左侧激励源,inv代表模型中的耦合区,smr2代表模型中的右侧激励源,t是total的简写。
[0102]
由上可以看出,s21表达式是一个与rs、ro、co、cm、lm、rm、k、ω、z0有关的变量。
[0103]
该模型为激励源位置关系的确定提供了指导。由于激励源之间的直线距离与二者之间的耦合强度k呈负相关关系,将k的值带入该模型及其相关公式,可以确定两个激励源之间的s21响应,即将一个激励源作为单位能量的输入端,能量串扰到另一个激励源上的水平。也就是说,在固定的位置关系下两个激励源直接的串扰,可以直接由该模型与公式得到。
[0104]
在实际阵列化的设计中,通常要求通过设计若干激励源之间的位置关系,尽可能减小激励源之间的串扰。因此利用该模型,可以将任意两个激励源之间的串扰与距离建立联系,通过最小化所有串扰的均方根值,得到任意两激励源距离的约束条件。根据此约束条件进一步优化激励源之间位置关系,即可以总体上最小化阵列的内部串扰。
[0105]
具体而言,在有n个激励源的阵列中,任意两个激励源之间的距离均需要被考虑,因此共存在即n(n
‑
1)/2个距离值,编号为d1,d2,
…
d
n(n
‑
1)/2
。根据该模型与相关公式,可以获得对应下标的距离下的串扰水平s21
‑1,s21
‑2,
…
s21
‑
n(n
‑
1)/2
。通过最小化表达式:
[0106][0107]
的取值,可以确定一个关于n(n
‑
1)/2个距离的约束:
[0108]
f(d1,d2,
…
,d
n(n
‑
1)/2
)
[0109]
利用该约束即可确定或优化串扰最小下n个激励源位置关系。
[0110]
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
[0111]
在本申请所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
[0112]
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0113]
另外,在本申请各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
[0114]
注意,上述仅为本申请的较佳实施例及所运用的技术原理。本领域技术人员会理解,本申请不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本申请的保护范围。因此,虽然通过以上实施例对本申请进行了较为详细的说明,但是本申请不仅仅限于以上实施例,在不脱离本申请的构思的情况下,还可以包括更多其他等效实施例,均属于本申请的保护范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1