一种行车行走异常的预警装置的制作方法
1.本实用新型涉及水厂行车技术领域,具体而言,涉及一种行车行走异常的预警装置。
背景技术:
2.行车又被称为行车式吸泥机,用于污水处理厂、自来水厂平流沉淀将沉降在池底的污泥刮到泵吸泥口,通过泵吸行走边吸泥,然后将污泥排出池外。现有结构的用于污泥处理的行车式吸泥机,通过设置在池边的行走轨道在池上行走,行车式吸泥机上设有滑轮,通过驱动电机驱动滑轮,实现行车式吸泥机的主动行走,以便将池底各个部位的沉泥吸出。
3.问题在于,行车式吸泥机在行走时仅仅通过滑轮进行导向,行车在运行时的运行轨迹容易发生倾斜,如果工人未及时发现行车的运行轨迹已经发生倾斜而任由行车继续前进不仅会影响吸泥效果,还会造成行车卡死,甚至脱轨。
技术实现要素:
4.鉴于上述问题,本实用新型提供了一种行车行走异常的预警装置旨在解决现有技术中,行车的运行轨迹发生倾斜后无法及时预警且无法及时作出反应容易造成行车卡死的问题。
5.一种行车行走异常的预警装置,包括行车本体和行车轨道,所述行车本体的一侧设置有距离传感器a,所述行车本体的另一侧设置有距离传感器b,所述距离传感器a与所述距离传感器b沿着所述行车本体的中轴线呈镜像对称设置,所述行车本体的底部设置有控制器,所述控制器的一侧设置有用于驱动所述行车本体运动的驱动装置,所述驱动装置的一侧设置有报警装置。
6.在本实用新型的一种实施例中,所述距离传感器a和所述距离传感器b的信号输出端均与所述控制器的信号接收端通信连接,所述控制器的信号输出端分别与所述报警装置和所述驱动装置的信号接收端通信连接。
7.在本实用新型的一种实施例中,所述控制器为plc控制器,所述报警装置为蜂鸣器。
8.在本实用新型的一种实施例中,所述行车本体的底部设置有蓄电池,所述蓄电池的一侧设置有电量传感器,所述电量传感器的信号接收端与所述蓄电池的信号输出端通信连接,所述电量传感器的信号输出端与所述plc控制器的信号接收端通信连接。
9.在本实用新型的一种实施例中,所述驱动装置包括电机,所述电机的输出轴与主动轮的轴心连接,所述主动轮通过传送带与从动轮连接,所述从动轮的轴心插接有第一轴承,所述第一轴承通过第一轴承座与所述行车本体的底部连接,所述第一轴承的两端设置有第一滑轮,所述行车本体底部远离所述第一轴承的一侧设置有第二轴承,所述第二轴承通过第二轴承座与所述行车本体连接,所述第二轴承的两端设置有第二滑轮。
10.在本实用新型的一种实施例中,所述行车轨道位于所述行车本体的两侧,所述第
一滑轮和所述第二滑轮均位于所述行车轨道上。
11.在本实用新型的一种实施例中,所述行车本体的底部设置有下罩体,所述下罩体采用防水材料制成,所述下罩体将所述行车本体的底部包裹于内部,所述下罩体与所述行车本体通过螺栓连接。
12.本实用新型的有益效果是:本装置设置的行车本体两侧分别设置有距离传感器a和距离传感器b,距离传感器a和距离传感器b分别用于监测行车轨道距离行车本体两侧的距离,并将检测到的距离信息发送至控制器,当行车轨道距离行车本体两侧的距离在预设范围内浮动时,则证明行车本体保持平行移动,当行车轨道距离行车本体两侧的距离超出预设值时,控制器控制驱动装置停止驱动,行车本体停止运动,即使操作者未及时发现行车本体已经行走异常也无需担心行车本体会卡死甚至脱轨,同时,控制器控制报警装置启动,报警装置发出报警声,操作者听到警报声后可立即赶来进行查看,及时处理,提高工作效率。
附图说明
13.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
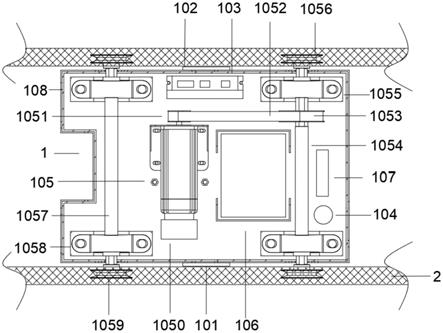
14.图1为本实用新型提供的一种行车行走异常的预警装置的仰剖图;
15.图2为本实用新型提供的一种行车行走异常的预警装置的通信框图。
16.图中:1-行车本体;101-距离传感器a;102-距离传感器b;103-控制器;104-报警装置;105-驱动装置;1050-电机;1051-主动轮;1052-传送带;1053-从动轮;1054-第一轴承;1055-第一轴承座;1056-第一滑轮;1057-第二轴承;1058-第二轴承座;1059-第二滑轮;106-蓄电池;107-电量传感器;108-下罩体;2-行车轨道。
具体实施方式
17.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
18.因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
19.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
20.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
21.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
22.实施例
23.请参阅图1-2,本实用新型提供一种技术方案:
24.一种行车行走异常的预警装置,包括行车本体1和行车轨道2,行车本体1的一侧设置有距离传感器a101,行车本体1的另一侧设置有距离传感器b102,距离传感器a101与距离传感器b102沿着行车本体1的中轴线呈镜像对称设置,行车本体1的底部设置有控制器103,控制器103的一侧设置有用于驱动行车本体1运动的驱动装置105,驱动装置105的一侧设置有报警装置104;
25.具体的,通过距离传感器a101与距离传感器b102采集到的数据来确定行车本体1的运行轨迹是否异常的原理为:距离传感器a101和距离传感器b102分别用于监测行车轨道2距离行车本体1两侧的距离,并将检测到的距离信息发送至控制器103,距离传感器a101第一次采集到行车本体1一侧距离行车轨道2一侧的距离为a1,距离传感器a101第二次采集到行车本体1一侧距离行车轨道2一侧的距离为a2,距离传感器a101第n次采集到行车本体1一侧距离行车轨道2一侧的距离为an,距离传感器b102第一次采集到行车本体1另一侧距离行车轨道2一侧的距离为b1,距离传感器b102第二次采集到行车本体1另一侧距离行车轨道2一侧的距离为b2,距离传感器b102第n次采集到行车本体1另一侧距离行车轨道2一侧的距离为bn,当an与a1之差的绝对值超过预设值范围且bn与b1之差的绝对值在预设值范围之内时,则判定行车本体1保持平行移动,当an与a1之差的绝对值超过预设值范围且bn与b1之差的绝对值超过预设值范围时,则判定行车本体1的运行轨迹异常。
26.进一步的,行车本体1在行走的过程中会产生晃动,导致行车本体1两侧距离行车轨道2的距离大小总是在发生变动,且由于无法保证第一滑轮1056和第二滑轮1059总是位于行车轨道2的正中间,因此将距离传感器a101与距离传感器b102沿着行车本体1的中轴线呈镜像对称设置,提高本装置的准确率。
27.在本实施例中,距离传感器a101和距离传感器b102的信号输出端均与控制器103的信号接收端通信连接,控制器103的信号输出端分别与报警装置104和驱动装置105的信号接收端通信连接;
28.具体的,距离传感器a101和距离传感器b102分别将检测到的距离信息发送至控制器103,控制器103为plc控制器,报警装置104为蜂鸣器,plc控制器用于控制驱动装置105和蜂鸣器的启停,当行车轨道2距离行车本体1两侧的距离在预设范围内浮动时,则证明行车本体1保持平行移动,当行车轨道2距离行车本体1两侧的距离超出预设值时,控制器103控制驱动装置105停止驱动,行车本体1停止运动,同时,控制器103控制蜂鸣器启动,蜂鸣器发出蜂鸣声。
29.在本实施例中,行车本体1的底部设置有蓄电池106,蓄电池106的一侧设置有电量
传感器107,电量传感器107的信号接收端与蓄电池106的信号输出端通信连接,电量传感器107的信号输出端与plc控制器的信号接收端通信连接;
30.具体的,蓄电池106用于为整个装置提供电源,电量传感器107用于检测蓄电池106的剩余电量,当蓄电池106的剩余电量低于预设值时,电量传感器107将电量信号传输至plc控制器,plc控制器控制蜂鸣器启动,蜂鸣器发出蜂鸣声,以提醒操作者及时充电。
31.在本实施例中,驱动装置105包括电机1050,电机1050的输出轴与主动轮1051的轴心连接,主动轮1051通过传送带1052与从动轮1053连接,从动轮1053的轴心插接有第一轴承1054,第一轴承1054通过第一轴承座1055与行车本体1的底部连接,第一轴承1054的两端设置有第一滑轮1056,行车本体1底部远离第一轴承1054的一侧设置有第二轴承1057,第二轴承1057通过第二轴承座1058与行车本体1连接,第二轴承1057的两端设置有第二滑轮1059;
32.具体的,行车轨道2位于行车本体1的两侧,第一滑轮1056和第二滑轮1059均位于行车轨道2上,由电机1050提供动力带动主动轮1051旋转,主动轮1051通过传送带1052带动从动轮1053旋转,从动轮1053带动第一滑轮1056旋转,第一滑轮1056带动第二滑轮1059旋转,此时行车本体1在行车轨道2上发生移动,当控制器103控制电机1050停止旋转时,主动轮1051和从动轮1053均会快速响应,进而减小行车本体1的惯性,避免行车本体1运行轨迹异常时,控制器103控制电机1050停止旋转后,行车本体1由于惯性作用依然继续前进导致行车本体1被卡死。
33.在本实施例中,行车本体1的底部设置有下罩体108,下罩体108采用防水材料制成,下罩体108将行车本体1的底部包裹于内部,下罩体108与行车本体1通过螺栓连接;
34.具体的,下罩体108用于防止河道里的水溅起时打湿行车本体1底部的元器件,避免造成安全隐患,延长行车本体1底部的元器件的使用寿命,同时,下罩体108与行车本体1通过螺栓连接,使得下罩体108便于拆卸和安装,方便维修或更换行车本体1底部的元器件。
35.该一种行车行走异常的预警装置的工作原理:在使用本装置时,由驱动装置105提供动力,带动行车本体1在行车轨道2上移动,距离传感器a101和距离传感器b102分别用于监测行车轨道2距离行车本体1两侧的距离,并将检测到的距离信息发送至控制器103,当行车轨道2距离行车本体1两侧的距离在预设范围内浮动时,则证明行车本体1保持平行移动,当行车轨道2距离行车本体1两侧的距离超出预设值时,控制器103控制驱动装置105停止驱动,行车本体1停止运动,同时,控制器103控制报警装置104启动,报警装置104发出报警声。
36.需要说明的是,电量传感器107、蓄电池106、距离传感器a101、距离传感器b102、电机1050、plc控制器和蜂鸣器具体的型号规格需根据该装置的实际规格等进行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。
37.需要说明的是,电量传感器107、蓄电池106、距离传感器a101、距离传感器b102、电机1050、plc控制器和蜂鸣器的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
38.以上所述仅为本实用新型的优选实施方式而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1