转矩矢量分配装置的制作方法
[0001]
本发明涉及一种主动地对向左右的驱动轴传递的转矩的分配(分配率)进行控制的转矩矢量分配装置。
背景技术:
[0002]
在专利文献1中记载了搭载于车辆的驱动齿轮装置的一个例子。该专利文献1所记载的驱动齿轮装置是所谓的转矩矢量分配装置,具备:差动机构,将驱动力源的输出转矩分配并传递至左右的驱动轮;以及控制用(差动用)马达,对从差动机构向左右的驱动轮传递的转矩的分配率进行控制。差动机构由两组单小齿轮型的行星齿轮机构构成。在该专利文献1的“图1”所示的例子中,两组行星齿轮机构中的各太阳轮成为输入元件,各轮架成为输出元件,各齿圈成为反作用力元件。具体而言,两组行星齿轮机构中的各太阳轮通过结合轴彼此连结。在结合轴的中央部分设有输入齿轮,该输入齿轮从驱动力源被传递转矩。在各轮架分别经由驱动轴(输出轴)连结有左右的驱动轮。并且,左右的齿圈经由反转机构(逆旋转构件)彼此连结。此外,在一方的齿圈以能传递转矩的方式连结有控制用马达。反转机构由第一齿轮构件和第二齿轮构件构成。第一齿轮构件具有与形成于一方的齿圈的外周部的外齿齿轮啮合的第一小齿轮、轴构件以及第二小齿轮。在轴构件的两端分别装配有第一小齿轮和第二小齿轮。同样地,第二齿轮构件具有与形成于另一方的齿圈的外周部的外齿齿轮啮合的第一小齿轮、轴构件、第二小齿轮。在轴构件的两端分别装配有第一小齿轮和第二小齿轮。并且,第一齿轮构件的第二小齿轮与第二齿轮构件的第二小齿轮啮合。因此,反转机构在左右的齿圈之间使输入至一方的齿圈的控制用马达的转矩的旋转方向反转来将该转矩向另一方的齿圈传递。
[0003]
需要说明的是,在上述的专利文献1的“图19”所示的例子中,两组行星齿轮机构中的各齿圈成为输入元件,各轮架成为输出元件,各太阳轮成为反作用力元件。具体而言,两组行星齿轮机构中的各齿圈通过结合构件以能传递转矩的方式连结。结合构件具有:第一小齿轮,与形成于一方的齿圈的外周部的外齿齿轮啮合;第二小齿轮,与形成于另一方的齿圈的外周部的外齿齿轮啮合;以及轴构件。在轴构件的两端分别装配有第一小齿轮和第二小齿轮。此外,被传递来自驱动力源的转矩的驱动齿轮与一方的齿圈的外齿齿轮啮合。在各轮架分别经由驱动轴(输出轴)连结有左右的驱动轮。并且,代替如上所述的结合轴,各太阳轮经由逆旋转马达单元彼此连结。逆旋转马达单元由马达和齿轮机构构成。马达的转子轴的一方的端部形成逆旋转马达单元中的第一输出轴。在转子轴的另一方的端部装配有小齿轮,该小齿轮与齿轮机构的第一反转齿轮(counter gear)啮合。第一反转齿轮装配于反转齿轮轴的一方的端部。在反转齿轮轴的另一方的端部装配有第二反转齿轮。第二反转齿轮与形成有逆旋转马达单元中的第二输出轴的旋转构件的内齿齿轮啮合。第一输出轴和第二输出轴配置在同轴上。第一输出轴连结于一方的太阳轮。第二输出轴连结于另一方的太阳轮。因此,逆旋转马达单元在左右的太阳轮之间使输入至一方的太阳轮的马达的转矩的旋转方向反转来将该转矩向另一方的太阳轮传递。即,逆旋转马达单元作为如上所述的控制
用马达和反转机构发挥功能。
[0004]
现有技术文献
[0005]
专利文献
[0006]
专利文献1:日本专利第6122119号公报
[0007]
发明所要解决的问题
[0008]
假定上述的专利文献1所记载的驱动齿轮装置作为转矩矢量分配装置而搭载于车辆。为了易于向车辆搭载,理想的是尽可能地使装置的外形小型化。在专利文献1的“图1”所示的例子中,反转机构配置于左右的行星齿轮机构中的各齿圈的外周侧。此外,控制用(差动用)马达也配置于各齿圈的外周侧。因此,在装置的径向上外形增大。相对于此,例如,如果在控制用马达与齿圈之间设置减速比更大的减速机构,则能使控制用马达小型化。或者,能得到控制用或差动用的更大的转矩。然而,由于新设置减速机构,结果装置的外形恐怕会增大。
[0009]
另一方面,在专利文献1的“图19”所示的例子中,兼作反转机构和控制用马达的逆旋转马达单元配置于左右的行星齿轮机构中的各太阳轮之间。因此,与上述的专利文献1的“图1”所示的例子相比,存在能抑制装置向径向的大型化的可能性。然而,抑制向径向的大型化并且将逆旋转马达单元配置于各太阳轮之间并不容易。逆旋转马达单元是第一输出轴和第二输出轴与反转齿轮轴平行配置的双轴构造,构造变得复杂。此外,若为了使马达小型化或者为了得到更大的转矩而设置减速机构,则构造变得更加复杂。其结果是,例如难以将逆旋转马达单元收容在行星齿轮机构的外径的范围内,结果装置的外形恐怕会增大。
技术实现要素:
[0010]
本发明是着眼于上述的技术问题而提出的,其目的在于提供一种使装置的外形小型化并且易于向车辆搭载的转矩矢量分配装置。
[0011]
用于解决问题的方案
[0012]
为了达成上述的目的,本发明是一种转矩矢量分配装置,具备:输入构件,从动力源被输入动力转矩;第一驱动轴和第二驱动轴,在同轴上左右对置地配置,能彼此相对旋转;差动机构,在所述输入构件与所述第一驱动轴和所述第二驱动轴之间,将输入至所述输入构件的所述动力转矩分配并传递至所述第一驱动轴和所述第二驱动轴,并且能实现所述第一驱动轴与所述第二驱动轴的差动旋转;致动器,将控制转矩赋予所述差动机构来使所述第一驱动轴与所述第二驱动轴进行差动旋转;以及反转机构,在所述第一驱动轴与所述第二驱动轴进行差动旋转的情况下,使所述第一驱动轴和所述第二驱动轴向彼此相反的方向旋转,所述转矩矢量分配装置的特征在于,所述差动机构由在同轴上左右对置地配置的第一动力行星齿轮机构和第二动力行星齿轮机构构成,所述第一动力行星齿轮机构具有:动力输入元件,从所述输入构件被传递所述动力转矩;第一动力输出元件,向所述第一驱动轴输出所述动力转矩;以及第一差动反作用力元件,被传递所述控制转矩来作为对从所述动力输入元件传递至所述第一动力输出元件的所述动力转矩的反作用力,所述第二动力行星齿轮机构具有:所述动力输入元件;第二动力输出元件,向所述第二驱动轴输出所述动力转矩;以及第二差动反作用力元件,被传递所述控制转矩来作为对从所述动力输入元件传递至所述第二动力输出元件的所述动力转矩的反作用力,所述反转机构由分别与所述第一
驱动轴和所述第二驱动轴配置在同轴上的第一控制行星齿轮机构和第二控制行星齿轮机构构成,所述第一控制行星齿轮机构经由所述第一差动反作用力元件将所述控制转矩传递至所述第一驱动轴,所述第二控制行星齿轮机构经由所述第二差动反作用力元件将所述控制转矩传递至所述第二驱动轴,所述第一控制行星齿轮机构具有:控制输入元件,从所述致动器被输入所述控制转矩;第一控制输出元件,向所述第一驱动轴输出所述控制转矩;第一行星齿轮,从所述控制输入元件被传递所述控制转矩;以及第一齿轮,与所述第一行星齿轮啮合,形成所述控制输入元件或所述第一控制输出元件,所述第二控制行星齿轮机构具有:所述控制输入元件;第二控制输出元件,向所述第二驱动轴输出所述控制转矩;第二行星齿轮,与所述第一行星齿轮配置在同轴上,从所述控制输入元件被传递所述控制转矩;以及第二齿轮,与所述第二行星齿轮啮合,形成所述控制输入元件或所述第二控制输出元件,包括所述第一行星齿轮和所述第一齿轮的第一齿轮系的齿轮传动比与包括所述第二行星齿轮和所述第二齿轮的第二齿轮系的齿轮传动比彼此不同。
[0013]
此外,本发明的特征在于,对于所述反转机构,表示所述第一控制输出元件的转速相对于所述控制输入元件的转速的比例的第一减速比和表示所述第二控制输出元件的转速相对于所述控制输入元件的转速的比例的第二减速比均大于“1”,所述反转机构形成将所述控制转矩放大并传递至所述第一控制输出元件和所述第二控制输出元件的减速齿轮机构。
[0014]
此外,本发明的特征在于,对于所述差动机构,所述输入构件与所述动力输入元件连结,所述第一动力输出元件与所述第一驱动轴连结,所述第二动力输出元件与所述第二驱动轴连结,对于所述反转机构,所述致动器与所述控制输入元件连结,所述第一齿轮形成所述第一控制输出元件,所述第二齿轮形成所述第二控制输出元件,所述反转机构将输入至所述控制输入元件的所述控制转矩放大并传递至所述第一驱动轴和所述第二驱动轴。
[0015]
此外,本发明的特征在于,在所述第一驱动轴与所述第二驱动轴向相同方向以相同速度进行旋转的情况下,所述反转机构与所述动力输入元件以及所述第一动力输出元件和所述第二动力输出元件一起牵连旋转。
[0016]
此外,本发明的特征在于,具有:第三行星齿轮,与所述第一行星齿轮和所述第二行星齿轮配置在同轴上;以及轮架,将各所述行星齿轮分别保持为能自转且能公转,所述第一行星齿轮与所述第二行星齿轮与所述第三行星齿轮在自转方向上一体地旋转,所述第三行星齿轮从所述动力输入元件被传递所述动力转矩。
[0017]
此外,本发明的特征在于,具有:第三行星齿轮和第四行星齿轮,分别与所述第一行星齿轮和所述第二行星齿轮配置在同轴上;以及轮架,将各所述行星齿轮分别保持为能自转且能公转,所述第一行星齿轮与所述第三行星齿轮在自转方向上一体地旋转,所述第二行星齿轮与所述第四行星齿轮在自转方向上一体地旋转,所述第一行星齿轮和所述第三行星齿轮与所述第二行星齿轮和所述第四行星齿轮能彼此相对旋转,所述第三行星齿轮和所述第四行星齿轮均从所述动力输入元件被传递所述动力转矩。
[0018]
此外,本发明的特征在于,所述差动机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;配置在同轴上的第一太阳轮、第二太阳轮以及第三太阳轮,所述第一太阳轮与所述第一行星齿轮啮合,所述第二太阳轮与所述第二行星齿轮啮合,所述第三太阳轮与所述第三行星齿轮啮合;以及所述轮架,所述第一太阳轮与所述第二太阳轮
与所述第三太阳轮能彼此相对旋转,所述第三太阳轮成为所述动力输入元件,所述第一太阳轮成为所述第一动力输出元件,所述轮架成为所述第一差动反作用力元件,从而构成所述第一动力行星齿轮机构,所述第三太阳轮成为所述动力输入元件,所述第二太阳轮成为所述第二动力输出元件,所述轮架成为所述第二差动反作用力元件,从而构成所述第二动力行星齿轮机构,所述反转机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;所述第一太阳轮、所述第二太阳轮以及所述第三太阳轮;以及所述轮架,所述轮架成为所述控制输入元件,所述第一太阳轮作为所述第一齿轮而成为所述第一控制输出元件,从而构成所述第一控制行星齿轮机构,所述轮架成为所述控制输入元件,所述第二太阳轮作为所述第二齿轮而成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述第一太阳轮的齿数与所述第二太阳轮的齿数与所述第三太阳轮的齿数均相等,所述第一行星齿轮的齿数多于所述第三行星齿轮的齿数,并且所述第二行星齿轮的齿数少于所述第三行星齿轮的齿数。
[0019]
此外,本发明的特征在于,所述差动机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;配置在同轴上的第一太阳轮、第二太阳轮以及第三太阳轮,所述第一太阳轮与所述第一行星齿轮啮合,所述第二太阳轮与所述第二行星齿轮啮合,所述第三太阳轮与所述第三行星齿轮啮合;所述轮架;以及内齿齿轮的齿圈,与所述第三行星齿轮啮合,所述第一太阳轮与所述第二太阳轮与所述第三太阳轮能彼此相对旋转,所述第三太阳轮成为所述动力输入元件,所述第一太阳轮成为所述第一动力输出元件,所述齿圈成为所述第一差动反作用力元件,从而构成所述第一动力行星齿轮机构,所述第三太阳轮成为所述动力输入元件,所述第二太阳轮成为所述第二动力输出元件,所述齿圈成为所述第二差动反作用力元件,从而构成所述第二动力行星齿轮机构,所述反转机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;所述第一太阳轮、所述第二太阳轮以及所述第三太阳轮;所述轮架;以及所述齿圈,所述齿圈成为所述控制输入元件,所述第一太阳轮作为所述第一齿轮而成为所述第一控制输出元件,从而构成所述第一控制行星齿轮机构,所述齿圈成为所述控制输入元件,所述第二太阳轮作为所述第二齿轮而成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述第一太阳轮的齿数与所述第二太阳轮的齿数与所述第三太阳轮的齿数均相等,所述第一行星齿轮的齿数多于所述第三行星齿轮的齿数,并且所述第二行星齿轮的齿数少于所述第三行星齿轮的齿数。
[0020]
此外,本发明的特征在于,所述差动机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;配置在同轴上的内齿齿轮的第一齿圈、内齿齿轮的第二齿圈以及内齿齿轮的第三齿圈,所述第一齿圈与所述第一行星齿轮啮合,所述第二齿圈与所述第二行星齿轮啮合,所述第三齿圈与所述第三行星齿轮啮合;以及所述轮架,所述第一齿圈与所述第二齿圈与所述第三齿圈能彼此相对旋转,所述第三齿圈成为所述动力输入元件,所述第一齿圈成为所述第一动力输出元件,所述轮架成为所述第一差动反作用力元件,从而构成所述第一动力行星齿轮机构,所述第三齿圈成为所述动力输入元件,所述第二齿圈成为所述第二动力输出元件,所述轮架成为所述第二差动反作用力元件,从而构成所述第二动力行星齿轮机构,所述反转机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;所述第一齿圈、所述第二齿圈以及所述第三齿圈;以及所述轮架,所述轮架成为所述控制输入元件,所述第一齿圈作为所述第一齿轮而成为所述第一控制输出元件,
从而构成所述第一控制行星齿轮机构,所述轮架成为所述控制输入元件,所述第二齿圈作为所述第二齿轮而成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述第一齿圈的齿数与所述第二齿圈的齿数与所述第三齿圈的齿数均相等,所述第一行星齿轮的齿数多于所述第三行星齿轮的齿数,并且所述第二行星齿轮的齿数少于所述第三行星齿轮的齿数。
[0021]
此外,本发明的特征在于,所述差动机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;配置在同轴上的第一太阳轮、第二太阳轮以及第三太阳轮,所述第一太阳轮与所述第一行星齿轮啮合,所述第二太阳轮与所述第二行星齿轮啮合,所述第三太阳轮与所述第三行星齿轮啮合;以及所述轮架,所述第一太阳轮与所述第二太阳轮与所述第三太阳轮能彼此相对旋转,所述第三太阳轮成为所述动力输入元件,所述第一太阳轮成为所述第一动力输出元件,所述轮架成为所述第一差动反作用力元件,从而构成所述第一动力行星齿轮机构,所述第三太阳轮成为所述动力输入元件,所述第二太阳轮成为所述第二动力输出元件,所述轮架成为所述第二差动反作用力元件,从而构成所述第二动力行星齿轮机构,所述反转机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;所述第一太阳轮、所述第二太阳轮以及所述第三太阳轮;以及所述轮架,所述轮架成为所述控制输入元件,所述第一太阳轮作为所述第一齿轮而成为所述第一控制输出元件,从而构成所述第一控制行星齿轮机构,所述轮架成为所述控制输入元件,所述第二太阳轮作为所述第二齿轮而成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述第一太阳轮的齿数与所述第二太阳轮的齿数与所述第三太阳轮的齿数均相等,所述第一行星齿轮的齿数多于所述第三行星齿轮的齿数,并且所述第二行星齿轮的齿数少于所述第三行星齿轮的齿数,所述转矩矢量分配装置还具备减速行星齿轮机构,所述减速行星齿轮机构在所述致动器与所述轮架之间将所述控制转矩放大并传递至所述轮架。
[0022]
此外,本发明的特征在于,所述差动机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;配置在同轴上的第一太阳轮、第二太阳轮以及第三太阳轮,所述第一太阳轮与所述第一行星齿轮啮合,所述第二太阳轮与所述第二行星齿轮啮合,所述第三太阳轮与所述第三行星齿轮啮合;以及所述轮架,所述第一太阳轮与所述第二太阳轮与所述第三太阳轮能彼此相对旋转,所述第三太阳轮成为所述动力输入元件,所述第一太阳轮成为所述第一动力输出元件,所述轮架成为所述第一差动反作用力元件,从而构成所述第一动力行星齿轮机构,所述第三太阳轮成为所述动力输入元件,所述第二太阳轮成为所述第二动力输出元件,所述轮架成为所述第二差动反作用力元件,从而构成所述第二动力行星齿轮机构,所述反转机构具有:所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮;所述第一太阳轮、所述第二太阳轮以及所述第三太阳轮;以及所述轮架,所述转矩矢量分配装置还具备减速行星齿轮机构,所述减速行星齿轮机构在所述致动器与所述轮架之间将所述控制转矩放大并传递至所述轮架,所述减速行星齿轮机构由第四太阳轮、齿圈以及所述轮架构成,所述第四太阳轮成为所述控制输入元件,所述第一太阳轮作为所述第一齿轮而成为所述第一控制输出元件,从而复合地构成所述第一控制行星齿轮机构,所述第四太阳轮成为所述控制输入元件,所述第二太阳轮作为所述第二齿轮而成为所述第二控制输出元件,从而复合地构成所述第二控制行星齿轮机构,所述第一太阳轮的齿数与所述第二太阳轮的齿数与所述第三太阳轮的齿数均相等,所述第一行星齿轮的齿数多于所述
第三行星齿轮的齿数,并且所述第二行星齿轮的齿数少于所述第三行星齿轮的齿数。
[0023]
此外,本发明的特征在于,所述减速行星齿轮机构具有同时与所述第四太阳轮和所述齿圈啮合的第四行星齿轮,所述第四行星齿轮与所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮配置在同轴上,并且能与所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮彼此相对旋转,所述轮架将所述第四行星齿轮与所述第一行星齿轮、所述第二行星齿轮以及所述第三行星齿轮一起分别保持为能自转且能公转。
[0024]
此外,本发明的特征在于,所述差动机构具有:所述第一行星齿轮、所述第二行星齿轮、所述第三行星齿轮以及所述第四行星齿轮;配置在同轴上的内齿齿轮的第一齿圈、内齿齿轮的第二齿圈、内齿齿轮的第三齿圈以及内齿齿轮的第四齿圈,所述第一齿圈与所述第一行星齿轮啮合,所述第二齿圈与所述第二行星齿轮啮合,所述第三齿圈与所述第三行星齿轮啮合,所述第四齿圈与所述第四行星齿轮啮合;以及所述轮架,所述第三齿圈与所述第四齿圈一体地旋转,所述第一齿圈与所述第二齿圈与所述第三齿圈和所述第四齿圈能彼此相对旋转,所述第三齿圈成为所述动力输入元件,所述第一齿圈成为所述第一动力输出元件,所述轮架成为所述第一差动反作用力元件,从而构成所述第一动力行星齿轮机构,所述第四齿圈成为所述动力输入元件,所述第二齿圈成为所述第二动力输出元件,所述轮架成为所述第二差动反作用力元件,从而构成所述第二动力行星齿轮机构,所述反转机构具有:所述第一行星齿轮、所述第二行星齿轮、所述第三行星齿轮以及所述第四行星齿轮;所述第一齿圈、所述第二齿圈、所述第三齿圈以及所述第四齿圈;以及所述轮架,所述轮架成为所述控制输入元件,所述第一齿圈作为所述第一齿轮而成为所述第一控制输出元件,从而构成所述第一控制行星齿轮机构,所述轮架成为所述控制输入元件,所述第二齿圈作为所述第二齿轮而成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述第一行星齿轮的齿数与所述第二行星齿轮的齿数与所述第三行星齿轮的齿数与所述第四行星齿轮的齿数均相等,所述第一齿圈的齿数与所述第二齿圈的齿数相等,所述第三齿圈的齿数少于所述第一齿圈的齿数和所述第二齿圈的齿数,并且所述第四齿圈的齿数多于所述第一齿圈的齿数和所述第二齿圈的齿数。
[0025]
此外,本发明的特征在于,对于所述差动机构,所述输入构件与所述动力输入元件连结,所述第一动力输出元件与所述第一驱动轴连结,所述第二动力输出元件与所述第二驱动轴连结,所述第一差动反作用力元件和所述第二差动反作用力元件经由所述反转机构连结于所述致动器,对于所述反转机构,所述致动器与所述控制输入元件连结,所述第一齿轮形成所述控制输入元件或所述第一控制输出元件,所述第二齿轮形成所述控制输入元件或所述第二控制输出元件,所述反转机构将输入至所述控制输入元件的所述控制转矩放大并传递至所述第一差动反作用力元件和所述第二差动反作用力元件。
[0026]
此外,本发明的特征在于,对于所述反转机构,所述第一控制行星齿轮机构和所述第二控制行星齿轮机构形成将所述控制转矩放大的减速齿轮机构,所述反转机构将由所述第一控制行星齿轮机构放大后的所述控制转矩传递至所述第一差动反作用力元件,将由所述第二控制行星齿轮机构放大后的所述控制转矩传递至所述第二差动反作用力元件。
[0027]
此外,本发明的特征在于,具备在同轴上左右对置地配置的第一输出转矩减速机构和第二输出转矩减速机构,所述第一输出转矩减速机构将传递至所述第一驱动轴的转矩放大,所述第二输出转矩减速机构将传递至所述第二驱动轴的转矩放大,所述第一动力输
出元件与所述第一驱动轴经由所述第一输出转矩减速机构连结,所述第二动力输出元件与所述第二驱动轴经由所述第二输出转矩减速机构连结,所述反转机构配置于旋转轴线方向上的所述第一输出转矩减速机构与所述第二输出转矩减速机构之间。
[0028]
此外,本发明的特征在于,所述反转机构具有:配置在同轴上的第一行星齿轮、第二行星齿轮、第三行星齿轮以及第四行星齿轮;配置在同轴上的第一太阳轮、第二太阳轮、第三太阳轮以及第四太阳轮,所述第一太阳轮与所述第一行星齿轮啮合,所述第二太阳轮与所述第二行星齿轮啮合,所述第三太阳轮与所述第三行星齿轮啮合,所述第四太阳轮与所述第四行星齿轮啮合;以及轮架,将各所述行星齿轮分别保持为能自转且能公转,所述第一行星齿轮与所述第三行星齿轮在自转方向上一体地旋转,所述第二行星齿轮与所述第四行星齿轮在自转方向上一体地旋转,所述第一行星齿轮和所述第三行星齿轮与所述第二行星齿轮和所述第四行星齿轮能彼此相对旋转,所述第三太阳轮与所述第四太阳轮连结,所述第一太阳轮与所述第二太阳轮与所述第三太阳轮和所述第四太阳轮能彼此相对旋转,所述第一太阳轮与所述第一差动反作用力元件连结,所述第二太阳轮与所述第二差动反作用力元件连结,所述轮架成为所述控制输入元件,所述第一太阳轮作为所述第一齿轮而成为所述第一控制输出元件,从而构成所述第一控制行星齿轮机构,所述轮架成为所述控制输入元件,所述第二太阳轮作为所述第二齿轮而成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述第一太阳轮的齿数与所述第二太阳轮的齿数与所述第三太阳轮的齿数与所述第四太阳轮的齿数均相等,所述第三行星齿轮的齿数与所述第四行星齿轮的齿数相等,所述第一行星齿轮的齿数多于所述第三行星齿轮的齿数和所述第四行星齿轮的齿数,并且所述第二行星齿轮的齿数少于所述第三行星齿轮的齿数和所述第四行星齿轮的齿数。
[0029]
此外,本发明的特征在于,所述反转机构具有:配置在同轴上的第一行星齿轮、第二行星齿轮以及第三行星齿轮;配置在同轴上的第一太阳轮、第二太阳轮以及第三太阳轮,所述第一太阳轮与所述第一行星齿轮啮合,所述第二太阳轮与所述第二行星齿轮啮合,所述第三太阳轮与所述第三行星齿轮啮合;以及轮架,将各所述行星齿轮分别保持为能自转且能公转,所述第一行星齿轮与所述第二行星齿轮与所述第三行星齿轮均在自转方向上一体地旋转,所述第一太阳轮与所述第二太阳轮与所述第三太阳轮能彼此相对旋转,所述第一太阳轮与所述第一差动反作用力元件连结,所述第二太阳轮与所述第二差动反作用力元件连结,所述轮架成为所述控制输入元件,所述第一太阳轮作为所述第一齿轮而成为所述第一控制输出元件,从而构成所述第一控制行星齿轮机构,所述轮架成为所述控制输入元件,所述第二太阳轮作为所述第二齿轮而成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述第一太阳轮的齿数与所述第二太阳轮的齿数与所述第三太阳轮的齿数均相等,所述第一行星齿轮的齿数少于所述第三行星齿轮的齿数,并且所述第二行星齿轮的齿数多于所述第三行星齿轮的齿数。
[0030]
此外,本发明的特征在于,所述反转机构具有:配置在同轴上的第一行星齿轮、第二行星齿轮、第三行星齿轮以及第四行星齿轮;配置在同轴上的第一太阳轮、第二太阳轮、第三太阳轮以及第四太阳轮,所述第一太阳轮与所述第一行星齿轮啮合,所述第二太阳轮与所述第二行星齿轮啮合,所述第三太阳轮与所述第三行星齿轮啮合,所述第四太阳轮与所述第四行星齿轮啮合;配置在同轴上的内齿齿轮的第一齿圈、内齿齿轮的第二齿圈、内齿
齿轮的第三齿圈以及内齿齿轮的第四齿圈,所述第一齿圈与所述第一行星齿轮啮合,所述第二齿圈与所述第二行星齿轮啮合,所述第三齿圈与所述第三行星齿轮啮合,所述第四齿圈与所述第四行星齿轮啮合;以及配置在同轴上的第一轮架、第二轮架以及第三轮架,所述第一轮架将所述第一行星齿轮保持为能自转且能公转,所述第二轮架将所述第二行星齿轮保持为能自转且能公转,所述第三轮架将所述第三行星齿轮和所述第四行星齿轮保持为能自转且能公转,所述第一行星齿轮与所述第二行星齿轮与所述第三行星齿轮与所述第四行星齿轮能彼此相对旋转,所述第一太阳轮与所述第三太阳轮一体地旋转,所述第二太阳轮与所述第四太阳轮一体地旋转,所述第一太阳轮和所述第三太阳轮与所述第二太阳轮和所述第四太阳轮能彼此相对旋转,所述第一齿圈与所述第二齿圈与所述第三齿圈与所述第四齿圈均一体地旋转,所述第一轮架与所述第二轮架与所述第三轮架能彼此相对旋转,所述第一轮架与所述第一差动反作用力元件连结,所述第二轮架与所述第二差动反作用力元件连结,所述第一齿圈作为所述第一齿轮而成为所述控制输入元件,所述第一轮架成为所述第一控制输出元件,从而构成所述第一控制行星齿轮机构,所述第二齿圈作为所述第二齿轮而成为所述控制输入元件,所述第二轮架成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述第一行星齿轮的齿数与所述第二行星齿轮的齿数与所述第三行星齿轮的齿数与所述第四行星齿轮的齿数均相等,所述第三太阳轮的齿数与所述第四太阳轮的齿数相等,所述第一太阳轮的齿数少于所述第三太阳轮的齿数和所述第四太阳轮的齿数,并且所述第二太阳轮的齿数多于所述第三太阳轮的齿数和所述第四太阳轮的齿数,所述第三齿圈的齿数与所述第四齿圈的齿数相等,所述第一齿圈的齿数多于所述第三齿圈的齿数和所述第四齿圈的齿数,并且所述第二齿圈的齿数少于所述第三齿圈的齿数和所述第四齿圈的齿数。
[0031]
此外,本发明的特征在于,所述反转机构具有:配置在同轴上的第一行星齿轮、第二行星齿轮以及第三行星齿轮;配置在同轴上的第一太阳轮、第二太阳轮以及第三太阳轮,所述第一太阳轮与所述第一行星齿轮啮合,所述第二太阳轮与所述第二行星齿轮啮合,所述第三太阳轮与所述第三行星齿轮啮合;配置在同轴上的内齿齿轮的第一齿圈、内齿齿轮的第二齿圈以及内齿齿轮的第三齿圈,所述第一齿圈与所述第一行星齿轮啮合,所述第二齿圈与所述第二行星齿轮啮合,所述第三齿圈与所述第三行星齿轮啮合;以及配置在同轴上的第一轮架、第二轮架以及第三轮架,所述第一轮架将所述第一行星齿轮保持为能自转且能公转,所述第二轮架将所述第二行星齿轮保持为能自转且能公转,所述第三轮架将所述第三行星齿轮保持为能自转且能公转,所述第一太阳轮与所述第二太阳轮与所述第三太阳轮均一体地旋转,所述第一齿圈与所述第二齿圈与所述第三齿圈均一体地旋转,所述第一轮架与所述第二轮架与所述第三轮架能彼此相对旋转,所述第一轮架与所述第一差动反作用力元件连结,所述第二轮架与所述第二差动反作用力元件连结,所述第一齿圈作为所述第一齿轮而成为所述控制输入元件,所述第一轮架成为所述第一控制输出元件,从而构成所述第一控制行星齿轮机构,所述第二齿圈作为所述第二齿轮而成为所述控制输入元件,所述第二轮架成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述第一行星齿轮的齿数、所述第二行星齿轮的齿数以及所述第三行星齿轮的齿数均相等,所述第一太阳轮的齿数少于所述第三太阳轮的齿数,并且所述第二太阳轮的齿数多于所述第三太阳轮的齿数,所述第一齿圈的齿数多于所述第三齿圈的齿数,并且所述第二齿圈的齿
数少于所述第三齿圈的齿数。
[0032]
此外,本发明的特征在于,所述反转机构具有:配置在同轴上的第一行星齿轮、第二行星齿轮以及第三行星齿轮;配置在同轴上的第一太阳轮、第二太阳轮以及第三太阳轮,所述第一太阳轮与所述第一行星齿轮啮合,所述第二太阳轮与所述第二行星齿轮啮合,所述第三太阳轮与所述第三行星齿轮啮合;内齿齿轮的齿圈,与所述第二行星齿轮啮合;以及配置在同轴上的第一轮架和第二轮架,所述第一轮架将所述第一行星齿轮和所述第三行星齿轮保持为能自转且能公转,所述第二轮架将所述第二行星齿轮保持为能自转且能公转,所述第一行星齿轮与所述第三行星齿轮在自转方向上一体地旋转,所述第一行星齿轮和所述第三行星齿轮与所述第二行星齿轮能彼此相对旋转,所述第一太阳轮与所述第二太阳轮与所述第三太阳轮能彼此相对旋转,所述第一轮架与所述第二轮架能彼此相对旋转,所述第一轮架与所述第二太阳轮连结,所述第三太阳轮和所述齿圈均被固定为不能旋转,所述第一太阳轮与所述第一差动反作用力元件连结,所述第二轮架与所述第二差动反作用力元件连结,所述第一轮架成为所述控制输入元件,所述第一太阳轮作为所述第一齿轮而成为所述第一控制输出元件,从而构成所述第一控制行星齿轮机构,所述第二太阳轮作为所述第二齿轮而成为所述控制输入元件,所述第二轮架成为所述第二控制输出元件,从而构成所述第二控制行星齿轮机构,所述控制转矩经由所述第一轮架、所述第一行星齿轮以及所述第一太阳轮被传递至所述第一差动反作用力元件的齿轮传递路径的齿轮传动比与所述控制转矩经由所述第二太阳轮、所述第二行星齿轮以及所述第二轮架被传递至所述第二差动反作用力元件的齿轮传递路径的齿轮传动比彼此不同。
[0033]
此外,本发明的特征在于,所述输入构件具有向所述差动机构侧传递所述动力转矩的中空形状的动力转矩输出轴,所述致动器具有向所述反转机构侧传递所述控制转矩的中空形状的控制转矩输出轴,所述反转机构配置于所述动力转矩输出轴的中空部分和所述控制转矩输出轴的中空部分。
[0034]
此外,本发明的特征在于,所述致动器具有在同轴上左右对置地配置的第一旋转轴和第二旋转轴,所述第一旋转轴向所述第一驱动轴侧突出并输出所述控制转矩,所述第二旋转轴向所述第二驱动轴侧突出并输出所述控制转矩,对于所述反转机构,所述第一控制行星齿轮机构和所述第二控制行星齿轮机构分别分开配置在旋转轴线方向上的所述致动器的左右,所述第一控制行星齿轮机构具有被输入所述控制转矩的第一输入轴和向所述第一驱动轴侧传递所述控制转矩的第一输出轴,所述第二控制行星齿轮机构具有被输入所述控制转矩的第二输入轴和向所述第二驱动轴侧传递所述控制转矩的第二输出轴,所述第一旋转轴与所述第一输入轴连结,所述第二旋转轴与所述第二输入轴连结,所述第一输出轴与所述第一差动反作用力元件连结,所述第二输出轴与所述第二差动反作用力元件连结,所述控制转矩经由所述第一旋转轴、所述第一输入轴以及所述第一输出轴被传递至所述第一差动反作用力元件的齿轮传递路径的齿轮传动比与所述控制转矩经由所述第二旋转轴、所述第二输入轴以及所述第二输出轴被传递至所述第二差动反作用力元件的齿轮传递路径的齿轮传动比彼此不同。
[0035]
此外,本发明的特征在于,所述致动器是输出对所述第一差动反作用力元件和所述第二差动反作用力元件进行驱动的驱动转矩来作为所述控制转矩的电动马达,或者是输出对所述第一差动反作用力元件和所述第二差动反作用力元件进行制动的制动转矩来作
为所述控制转矩的制动机构。
[0036]
并且,本发明的特征在于,所述动力源是输出对所述第一驱动轴和所述第二驱动轴进行驱动的驱动转矩来作为所述动力转矩的电动马达以及输出对所述第一驱动轴和所述第二驱动轴进行制动的制动转矩来作为所述动力转矩的制动机构中的至少任一个。
[0037]
发明效果
[0038]
本发明的转矩矢量分配装置通过差动机构将从动力源输入的动力转矩分配并传递至左右的驱动轴(第一驱动轴和第二驱动轴)。与此同时,吸收第一驱动轴与第二驱动轴之间的转速差。即,当在第一驱动轴与第二驱动轴之间产生转速差时,使该第一驱动轴与第二驱动轴进行差动旋转。在第一驱动轴与第二驱动轴进行差动旋转时,通过反转机构的反转功能,第一驱动轴和第二驱动轴向彼此相反的旋转方向相对旋转。因此,能高效地吸收第一驱动轴与第二驱动轴之间的转速差。本发明的转矩矢量分配装置例如能作为车辆的驱动系统中的差动装置而搭载于车辆。
[0039]
此外,本发明的转矩矢量分配装置具备将控制转矩赋予差动机构的各差动反作用力元件的致动器。因此,除了如上所述的作为差动装置的作用之外,还能通过致动器所输出的控制转矩来主动地控制针对第一驱动轴和第二驱动轴的转矩的分配率以及第一驱动轴与第二驱动轴之间的差动旋转。即,能进行针对第一驱动轴和第二驱动轴的转矩矢量分配。
[0040]
此外,在本发明的转矩矢量分配装置中,反转机构与第一驱动轴和第二驱动轴配置在同一旋转轴线上。反转机构基本上成为将主要的旋转元件与第一驱动轴和第二驱动轴配置在同一旋转轴线上的所谓的单轴构造。因此,转矩矢量分配装置的主要部分由单轴构造构成。因此,能抑制转矩矢量分配装置向径向的大型化并能容易地设置反转机构。此外,使第一驱动轴和第二驱动轴向彼此相反的方向旋转的反转功能通过使第一控制行星齿轮机构中的第一齿轮系的齿轮传动比与第二控制行星齿轮机构中的第二齿轮系的齿轮传动比彼此不同来实现。例如,使第一齿轮的齿数相对于作为基准的规定的齿轮的齿数增加(或减少),使第二齿轮的齿数相对于作为基准的规定的齿轮的齿数减少(或增加),由此,能容易地使第一齿轮系的齿轮传动比与第二齿轮系的齿轮传动比不同。因此,能容易地构成本发明的转矩矢量分配装置中的反转机构而不必使用复杂的构成。
[0041]
此外,在本发明的转矩矢量分配装置中,如上所述,使第一控制行星齿轮机构中的第一齿轮系的齿轮传动比与第二控制行星齿轮机构中的第二齿轮系的齿轮传动比彼此不同。因此,在左右的驱动轴的转速相等的状态下,在第一控制行星齿轮机构和第二控制行星齿轮机构分别传递转矩时,该第一齿轮系中的齿轮的啮合与第二齿轮系中的齿轮的啮合彼此干扰。其结果是,反转机构实质上成为卡合状态,成为一体地旋转。因此,第一驱动轴和第二驱动轴成为一体地旋转,而不进行差动旋转。相对于此,在第一驱动轴的转速与第二驱动轴的转速之间存在转速差的状态下,如上所述的因第一齿轮系与第二齿轮系之间的齿轮的干扰而产生的卡合状态被解除,第一控制行星齿轮机构和第二控制行星齿轮机构根据第一齿轮系和第二齿轮系各自的齿轮传动比来传递转矩。其结果是,第一驱动轴和第二驱动轴以一方的驱动轴相对于另一方的驱动轴反转的方式分别旋转。即,第一驱动轴和第二驱动轴进行差动旋转并且向彼此相反的旋转方向相对旋转。如此,本发明的转矩矢量分配装置作为将从动力源输入的动力转矩分配并传递至左右的驱动轴并且吸收第一驱动轴与第二驱动轴之间的转速差的差动装置发挥功能。除此之外,通过控制致动器来改变控制转矩,能
实现对针对第一驱动轴和第二驱动轴的转矩分配进行控制的转矩矢量分配。
[0042]
而且,在本发明的转矩矢量分配装置中,反转机构中的第一控制行星齿轮机构和第二控制行星齿轮机构均形成减速比大于“1”的减速齿轮机构。即,反转机构除了具备如上所述的反转功能之外,还具备将致动器的控制转矩放大的减速功能。因此,根据本发明的转矩矢量分配装置,能与通过反转机构的减速功能来放大控制转矩相应地谋求致动器的小型化。因此,能使转矩矢量分配装置小型化。
[0043]
如上所述,对于本发明的转矩矢量分配装置而言,反转机构成为单轴构造,能容易地构成反转机构而不必使用复杂的构造。此外,通过将反转机构与第一驱动轴和第二驱动轴配置在同轴上,能抑制转矩矢量分配装置向径向的大型化。而且,能通过反转机构的减速功能(转矩放大作用)来使致动器小型化。因此,根据本发明的转矩矢量分配装置,能容易地谋求反转机构和致动器的小型化,进而,能使转矩矢量分配装置的外形小型化。其结果是,能容易地将小型化后的转矩矢量分配装置搭载于车辆。
[0044]
此外,本发明的转矩矢量分配装置能使用电动马达或制动机构来作为致动器。通过控制电动马达来改变控制转矩,能控制第一驱动轴与第二驱动轴之间的差动旋转。或者,通过控制制动机构来改变控制转矩,能控制第一驱动轴与第二驱动轴之间的差动旋转。此外,能通过电动马达的再生转矩或制动机构的制动转矩来限制第一驱动轴与第二驱动轴之间的差动旋转(差速器锁定)。
[0045]
并且,本发明的转矩矢量分配装置能使用电动马达或制动机构、或者带有制动功能的电动马达来作为动力源。电动马达能输出驱动转矩来作为动力转矩,控制第一驱动轴与第二驱动轴之间的驱动力分配。此外,电动马达还能输出再生转矩来作为动力转矩,并控制第一驱动轴与第二驱动轴之间的制动力分配。通过电动马达的再生制动实现的制动力分配能高精度且响应性良好地执行,因此,例如能应用于车辆的abs(antilock brake system:防抱死制动系统)控制。并且,通过将电动马达与本发明的转矩矢量分配装置组装成一体,能构成具有如上所述的转矩矢量分配功能的马达驱动单元。或者,通过将制动机构与本发明的转矩矢量分配装置组装成一体,能构成具有如上所述的转矩矢量分配功能的制动单元。或者,通过将带有制动功能的电动马达与本发明的转矩矢量分配装置组装成一体,能构成具有如上所述的转矩矢量分配功能和制动功能的动力单元。
附图说明
[0046]
图1是用于说明本发明的转矩矢量分配装置的一个例子(第一实施例)的图。
[0047]
图2是用于说明本发明的转矩矢量分配装置的其他例子(第二实施例)的图。
[0048]
图3是用于说明本发明的转矩矢量分配装置的其他例子(第三实施例)的图。
[0049]
图4是用于说明本发明的转矩矢量分配装置的其他例子(第四实施例)的图。
[0050]
图5是用于说明本发明的转矩矢量分配装置的其他例子(第五实施例)的图。
[0051]
图6是用于说明本发明的转矩矢量分配装置的其他例子(第六实施例)的图。
[0052]
图7是用于说明本发明的转矩矢量分配装置的其他例子(第七实施例)的图。
[0053]
图8是用于说明本发明的转矩矢量分配装置的其他例子(第八实施例)的图。
[0054]
图9是用于说明本发明的转矩矢量分配装置的其他例子(第九实施例)的图。
[0055]
图10是用于说明本发明的转矩矢量分配装置的其他例子(第十实施例)的图。
[0056]
图11是用于说明本发明的转矩矢量分配装置的其他例子(第十一实施例)的图。
[0057]
图12是用于说明本发明的转矩矢量分配装置的其他例子(第十二实施例)的图。
[0058]
图13是用于说明本发明的转矩矢量分配装置的其他例子(第十三实施例)的图。
[0059]
图14是用于说明本发明的转矩矢量分配装置的其他例子(第十四实施例)的图。
[0060]
图15是用于说明本发明的转矩矢量分配装置的其他例子(第十五实施例)的图。
[0061]
图16是用于说明本发明的转矩矢量分配装置的其他例子(第十六实施例)的图。
[0062]
图17是用于说明本发明的转矩矢量分配装置的其他例子(第十七实施例)的图。
[0063]
图18是用于说明本发明的转矩矢量分配装置的其他例子(第十八实施例)的图。
[0064]
图19是用于说明本发明的转矩矢量分配装置的其他例子(第十九实施例)的图。
[0065]
图20是用于说明本发明的转矩矢量分配装置的其他例子(第二十实施例)的图。
[0066]
图21是用于说明本发明的转矩矢量分配装置的其他例子(第二十一实施例)的图。
[0067]
图22是用于说明本发明的转矩矢量分配装置的其他例子(第二十二实施例)的图。
[0068]
附图标记说明
[0069]
1、41、101:输入构件;2、102:差动机构;3、103:第一驱动轴;4、104:第二驱动轴;5、105:致动器;5a、105a:控制转矩输出轴;105b:第一旋转轴;105c:第二旋转轴;6、106:反转机构;7、107:(转矩矢量分配装置的)壳体;8、108:电动马达(动力源);8a、108a:动力转矩输出轴;108b:第一动力转矩输出轴;108c:第二动力转矩输出轴;9:制动机构(动力源);10:小齿轮(输入齿轮);11、163、166:反转齿轮;12:反转齿轮轴;13、43、51、62:差速器齿圈;14:差速器壳体;15、109、141、161、201:第一动力行星齿轮机构;16、110、142、162、202:第二动力行星齿轮机构;17、111:动力输入元件;18、112:第一动力输出元件;19、113:第一差动反作用力元件;20、114:第二动力输出元件;21、115:第二差动反作用力元件;22、81、121、146、169、181、211、231、251、271、291:第一行星齿轮;23、82、124、147、170、182、212、232、252、272、292:第二行星齿轮;24、83、126、148、171、183、213、233、253、273:第三行星齿轮;25、128、149、172、185、215、234、254、274、293:第一太阳轮;26、129、150、173、186、216、235、255、275、294:第二太阳轮;27、130、151、174、187、217、236、256、276、295:第三太阳轮;28、89、132、152、175:轮架;29、117、311、321、331:第一控制行星齿轮机构;30、118、312、322、332:第二控制行星齿轮机构;31、119:控制输入元件;32、120:第一控制输出元件;33、122:第一齿轮;34、123:第二控制输出元件;35、125:第二齿轮;36、66、72、90、133、153、176、196、226、243、263、280、299:第一齿轮系;37、67、73、91、134、154、177、197、227、244、264、281、300:第二齿轮系;42:输入齿轮;52、277:齿圈;61:减速齿轮;63、85、189、219、237、257、295:第一齿圈;64、86、190、220、238、258、296:第二齿圈;65、87、191、221、239、259:第三齿圈;71:减速行星齿轮机构;74:减速机构(复合行星齿轮机构);84、127、184、214:第四行星齿轮;88、192、222:第四齿圈;116、203:连结轴;131、188、218:第四太阳轮;143:第一输出转矩减速机构;144:连结机构;145:第二输出转矩减速机构;164:第一小齿轮;165:齿轮系;167:第二小齿轮;193、223、240、260、278、297:第一轮架;194、224、241、261、279、298:第二轮架;195、225、242、262:第三轮架;282、283、301、302:齿轮传递路径;al:旋转轴线;tv:转矩矢量分配装置。
具体实施方式
[0070]
参照附图,对本发明的实施方式进行说明。需要说明的是,以下所示的实施方式只不过是使本发明具体化的情况下的一个例子,并不限定本发明。
[0071]
〔第一实施例〕
[0072]
在图1中示出应用了本发明的转矩矢量分配装置的一个例子(第一实施例)。本发明的实施方式的转矩矢量分配装置tv具备输入构件1、差动机构2、第一驱动轴3、第二驱动轴4、致动器5以及反转机构6来作为主要构成元件。
[0073]
输入构件1被输入规定的动力源所输出的动力转矩。在图1所示的例子中,输入构件1是设有输入齿轮(后述的小齿轮10)的旋转轴,两端部分可旋转地支承于转矩矢量分配装置tv的壳体7。
[0074]
在输入构件1的一方(图1的右侧)的端部连结有电动马达8的输出轴、即动力转矩输出轴8a。在输入构件1的另一方(图1的左侧)的端部连结有制动机构9的旋转轴9a。即,在图1所示的例子中,作为动力源,带有制动功能的电动马达被组装于转矩矢量分配装置tv而被单元化。电动马达8产生驱动转矩或再生转矩来作为动力转矩。电动马达8例如由永磁铁式的同步马达或者感应马达等构成。制动机构9产生制动转矩来作为动力转矩。制动机构9例如由利用被通电而产生的磁吸引力来对规定的旋转构件进行制动的励磁工作型的电磁制动器、或者使用被电动马达驱动的进给丝杠机构来产生摩擦制动力的电动制动器、或者利用在由马达发电时产生的阻力来对规定的旋转构件进行制动的再生制动器等构成。
[0075]
通过将如上所述的电动马达8和制动机构9一起与本发明的实施方式的转矩矢量分配装置tv组装成一体,能构成具有转矩矢量分配功能和制动功能的动力单元。需要说明的是,本发明的实施方式的转矩矢量分配装置tv也可以是仅组装有电动马达来作为动力源的构成。在该情况下,能构成具有转矩矢量分配功能的马达驱动单元。或者,也可以是仅组装有制动机构来作为动力源的构成。在该情况下,能构成具有转矩矢量分配功能的制动单元。
[0076]
在输入构件1的中央部分装配有小齿轮10。小齿轮10与输入构件1一体地旋转。小齿轮10是从电动马达8、制动机构9等动力源经由输入构件1被传递动力转矩的所谓的输入齿轮。小齿轮10与反转齿轮11啮合。反转齿轮11旋转自如地支承于反转齿轮轴12。反转齿轮轴12的两端固定于壳体7。此外,反转齿轮11和小齿轮10一起与差速器齿圈13啮合。差速器齿圈13是设于差速器壳体14的外周部分的外齿齿轮。差速器齿圈13与差速器壳体14一体地旋转。此外,在差速器壳体14连结有后述的第三太阳轮轴27a。因此,差速器壳体14和差速器齿圈13与第三太阳轮轴27a一体地旋转。差速器壳体14在内部容纳差动机构2和反转机构6等。差速器壳体14以相对于壳体7旋转自如的方式支承于壳体7。在图1所示的例子中,差速器壳体14被支承为可与壳体7和后述的轮架轴28b相对旋转。
[0077]
上述的反转齿轮11和差速器齿圈13均成为直径比小齿轮10大、齿数比小齿轮10多的大直径的齿轮。因此,由小齿轮10、反转齿轮11以及差速器齿圈13构成的齿轮系形成使差速器齿圈13的输出转速相对于小齿轮10的输入转速进行减速的减速齿轮机构。因此,输入至输入构件1的动力源的动力转矩通过包括如上所述的小齿轮10、反转齿轮11以及差速器齿圈13的变速齿轮机构被放大,并被传递至后述的差动机构2的动力输入元件17。
[0078]
差动机构2由第一动力行星齿轮机构15和第二动力行星齿轮机构16构成。第一动
力行星齿轮机构15和第二动力行星齿轮机构16分别在同轴上左右对置地配置。第一动力行星齿轮机构15具有动力输入元件17、第一动力输出元件18以及第一差动反作用力元件19。动力输入元件17从输入构件1被传递动力转矩。第一动力输出元件18向第一驱动轴3输出动力转矩。后述的控制转矩作为对从动力输入元件17传递至第一动力输出元件18的动力转矩的反作用力而被传递至第一差动反作用力元件19。另一方面,第二动力行星齿轮机构16具有动力输入元件17、第二动力输出元件20以及第二差动反作用力元件21。动力输入元件17与上述的第一动力行星齿轮机构15兼用。第二动力输出元件20向第二驱动轴4输出动力转矩。后述的控制转矩作为对从动力输入元件17传递至第二动力输出元件20的动力转矩的反作用力而被传递至第二差动反作用力元件21。需要说明的是,在图1所示的例子中,后述的轮架28兼作第一差动反作用力元件19和第二差动反作用力元件21。
[0079]
差动机构2具有:第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24这三组行星齿轮;第一太阳轮25、第二太阳轮26以及第三太阳轮27这三个太阳轮;以及轮架28。第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24在同轴上串联地配置。第一太阳轮25、第二太阳轮26以及第三太阳轮27在同轴上串联地配置。轮架28将第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24分别保持为能自转并且能绕各太阳轮25、26、27公转。
[0080]
第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24分别旋转自如地支承于固定在轮架28的行星齿轮轴28a。第一行星齿轮22与第二行星齿轮23与第三行星齿轮24均在以行星齿轮轴28a为旋转轴的自转方向上一体地旋转(在自转方向上不相对旋转)。第一行星齿轮22与第一太阳轮25啮合。第二行星齿轮23与第二太阳轮26啮合。第三行星齿轮24与第三太阳轮27啮合。第一太阳轮25、第二太阳轮26以及第三太阳轮27以能彼此相对旋转的方式分别旋转自如地支承于壳体7。
[0081]
与第三太阳轮27一体地旋转的第三太阳轮轴27a装配于差速器壳体14。第三太阳轮轴27a与差速器壳体14一体地旋转。即,第三太阳轮27与差速器齿圈13一体地旋转。因此,动力源所产生的动力转矩经由输入构件1和包括小齿轮10、反转齿轮11以及差速器齿圈13的变速齿轮机构被传递至第三太阳轮27。因此,第三太阳轮27成为差动机构2的动力输入元件17。
[0082]
第一太阳轮25连结于第一驱动轴3。第一太阳轮25与第一驱动轴3一体地旋转。因此,传递至差动机构2的动力转矩的一部分从第一太阳轮25被输出至第一驱动轴3。因此,第一太阳轮25成为差动机构2的第一动力输出元件18。
[0083]
第二太阳轮26连结于第二驱动轴4。第二太阳轮26与第二驱动轴4一体地旋转。因此,传递至差动机构2的动力转矩的一部分从第二太阳轮26被输出至第二驱动轴4。因此,第二太阳轮26成为差动机构2的第二动力输出元件20。
[0084]
与轮架28一体地旋转的轮架轴28b连结于后述的致动器5的控制转矩输出轴5a。轮架28与控制转矩输出轴5a一体地旋转。如下所述,从致动器5传递至轮架28的控制转矩作为对从动力输入元件17传递至第一动力输出元件18的动力转矩和从动力输入元件17传递至第二动力输出元件20的动力转矩的反作用力发挥作用。因此,轮架28成为差动机构2的第一差动反作用力元件19和第二差动反作用力元件21。
[0085]
如此,在差动机构2中,第三太阳轮27成为动力输入元件17,第一太阳轮25成为第一动力输出元件18,轮架28成为第一差动反作用力元件19,从而构成第一动力行星齿轮机
构15。与此同时,第三太阳轮27成为动力输入元件17,第二太阳轮26成为第二动力输出元件20,轮架28成为第二差动反作用力元件21,从而构成第二动力行星齿轮机构16。
[0086]
第一差动反作用力元件19和第二差动反作用力元件21(即轮架28)在动力输入元件17以及第一动力输出元件18和第二动力输出元件20的旋转时被反作用力支承,使得在从动力输入元件17(即第三太阳轮27)向第一动力输出元件18(即第一太阳轮25)和第二动力输出元件20(即第二太阳轮26)传递动力转矩时,容许第一动力输出元件18与第二动力输出元件20之间的转速之差。
[0087]
第一驱动轴3和第二驱动轴4在同轴上左右对置地配置。此外,第一驱动轴3和第二驱动轴4与第一动力行星齿轮机构15和第二动力行星齿轮机构16配置在同轴上。具体而言,第一驱动轴3和第二驱动轴4以及第一动力行星齿轮机构15和第二动力行星齿轮机构16配置在同一旋转轴线al上。第一驱动轴3与第二驱动轴4能彼此相对旋转。第一驱动轴3的突出侧(图1的左侧)的端部可旋转地支承于壳体7。同样地,第二驱动轴4的突出侧(图1的右侧)的端部可旋转地支承于壳体7。例如,在将本发明的实施方式的转矩矢量分配装置tv搭载于车辆的情况下,在第一驱动轴3和第二驱动轴4分别装配有驱动轮(未图示)。
[0088]
第一驱动轴3和第二驱动轴4分别连结于差动机构2的第一动力输出元件18和第二动力输出元件20。因此,第一驱动轴3与第二驱动轴4通过差动机构2的作用进行差动旋转。例如,在搭载有本发明的实施方式的转矩矢量分配装置tv的车辆进行转弯行驶的情况下,差动机构2作为车辆的差动装置发挥功能,根据内轮与外轮的转速差,第一驱动轴3与第二驱动轴4进行差动旋转。此外,如下所述,在改变致动器5的控制转矩来控制针对左右的驱动轮的转矩分配的情况下,即在进行转矩矢量分配的情况下,第一驱动轴3与第二驱动轴4进行差动旋转。
[0089]
致动器5将由致动器5产生的转矩作为控制转矩而赋予差动机构2。差动机构2因控制转矩被赋予差动机构2的第一差动反作用力元件19和第二差动反作用力元件21而使第一驱动轴3与第二驱动轴4进行差动旋转。作为致动器5,例如可以使用电动马达或者制动机构。电动马达输出对第一差动反作用力元件19和第二差动反作用力元件21进行驱动的驱动转矩来作为控制转矩。或者,输出对第一差动反作用力元件19和第二差动反作用力元件21进行制动的再生转矩来作为控制转矩。制动机构输出对第一差动反作用力元件19和第二差动反作用力元件21进行制动的制动转矩来作为控制转矩。例如,可以使用利用被通电而产生的磁吸引力来对规定的旋转构件进行制动的励磁工作型的电磁制动器、使用被电动马达驱动的进给丝杠机构来产生摩擦制动力的电动制动器等。
[0090]
致动器5具有输出如上所述的驱动转矩、再生转矩或制动转矩来作为控制转矩的控制转矩输出轴5a。在图1所示的例子中,使用了输出驱动转矩或再生转矩来作为控制转矩的电动马达。因此,电动马达的转子轴成为控制转矩输出轴5a。控制转矩输出轴5a连结于轮架28的轮架轴28b。轮架28与控制转矩输出轴5a一体地旋转。
[0091]
如上所述,在本发明的实施方式的转矩矢量分配装置tv中,可以使用电动马达或制动机构来作为致动器5。通过控制电动马达来改变控制转矩,能控制第一驱动轴3与第二驱动轴4之间的差动旋转。或者,通过控制制动机构来改变控制转矩,能控制第一驱动轴3与第二驱动轴4之间的差动旋转。此外,能通过电动马达的再生转矩或制动机构的制动转矩来限制第一驱动轴3与第二驱动轴4之间的差动旋转(差速器锁定)。
[0092]
反转机构6与第一驱动轴3和第二驱动轴4配置在同轴上。反转机构6在第一驱动轴3与第二驱动轴4进行差动旋转的情况下,使该第一驱动轴3和第二驱动轴4向彼此相反的方向旋转。反转机构6由第一控制行星齿轮机构29和第二控制行星齿轮机构30构成。第一控制行星齿轮机构29和第二控制行星齿轮机构30均与第一驱动轴3和第二驱动轴4配置在同轴上。具体而言,第一驱动轴3和第二驱动轴4以及第一控制行星齿轮机构29和第二控制行星齿轮机构30均配置在同一旋转轴线al上。第一控制行星齿轮机构29经由差动机构2的第一差动反作用力元件19将致动器5所输出的控制转矩传递至第一驱动轴3。第二控制行星齿轮机构30经由差动机构2的第二差动反作用力元件21将致动器5所输出的控制转矩传递至第二驱动轴4。
[0093]
反转机构6被配置为:在第一驱动轴3与第二驱动轴4向相同方向以相同速度进行旋转的情况下,与动力输入元件17(即第三太阳轮27)以及第一动力输出元件18(即第一太阳轮25)和第二动力输出元件20(即第二太阳轮26)一起牵连旋转。
[0094]
第一控制行星齿轮机构29具有控制输入元件31、第一控制输出元件32、第一行星齿轮22以及第一齿轮33。控制输入元件31从致动器5被输入控制转矩。第一控制输出元件32向第一驱动轴3输出控制转矩。在反转机构6中,第一行星齿轮22从控制输入元件31被传递控制转矩。第一齿轮33与第一行星齿轮22啮合,形成控制输入元件31或第一控制输出元件32。另一方面,第二控制行星齿轮机构30具有控制输入元件31、第二控制输出元件34、第二行星齿轮23以及第二齿轮35。控制输入元件31与上述的第一控制行星齿轮机构29兼用。第二控制输出元件34向第二驱动轴4输出控制转矩。在反转机构6中,第二行星齿轮23从控制输入元件31被传递控制转矩。第二齿轮35与第二行星齿轮23啮合,形成控制输入元件31或第二控制输出元件34。
[0095]
反转机构6具有:第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24这三组行星齿轮;第一太阳轮25、第二太阳轮26以及第三太阳轮27这三个太阳轮;以及轮架28。其中,轮架28成为控制输入元件31,第一太阳轮25成为第一控制输出元件32,从而构成第一控制行星齿轮机构29。在该情况下,与第一行星齿轮22啮合的第一太阳轮25为第一控制输出元件32,并且成为第一齿轮33。此外,轮架28成为控制输入元件31,第二太阳轮26成为第二控制输出元件34,从而构成第二控制行星齿轮机构30。在该情况下,与第二行星齿轮23啮合的第二太阳轮26为第二控制输出元件34,并且成为第二齿轮35。
[0096]
包括第一行星齿轮22和第一齿轮33的第一齿轮系36的齿轮传动比与包括第二行星齿轮23和第二齿轮35的第二齿轮系37的齿轮传动比彼此不同。具体而言,第一齿轮系36中的第一行星齿轮22和第一太阳轮25的齿轮副的齿轮传动比与第二齿轮系37中的第二行星齿轮23和第二太阳轮26的齿轮副的齿轮传动比彼此不同。在图1所示的例子中,第一太阳轮25的齿数与第二太阳轮26的齿数与第三太阳轮27的齿数均相等。第一行星齿轮22的齿数、第二行星齿轮23的齿数以及第三行星齿轮24的齿数均少于各太阳轮25、26、27的齿数。并且,第一行星齿轮22的齿数多于第三行星齿轮24的齿数,并且第二行星齿轮23的齿数少于第三行星齿轮24的齿数。例如,如图1中括号内的数值所示,各太阳轮25、26、27的齿数为“68”,第一行星齿轮22的齿数为“36”,第二行星齿轮23的齿数为“34”,第三行星齿轮24的齿数为“35”。
[0097]
在该情况下,当将第一行星齿轮22的齿数设为z
p1
、将第一太阳轮25的齿数设为z
s1
时,第一齿轮系36的齿轮传动比u1成为:
[0098]
u1=z
p1
/z
s1
。
[0099]
因此,例如,如上述的例子那样,在第一行星齿轮22的齿数z
p1
为“36”、第一太阳轮25的齿数z
s1
为“68”的情况下,第一齿轮系36的齿轮传动比u1成为:
[0100]
u1=0.53。
[0101]
同样地,当将第二行星齿轮23的齿数设为z
p2
、将第二太阳轮26的齿数设为z
s2
时,第二齿轮系37的齿轮传动比u2成为:
[0102]
u2=z
p2
/z
s2
。
[0103]
因此,例如,如上述的例子那样,在第二行星齿轮23的齿数z
p2
为“34”、第二太阳轮26的齿数z
s2
为“68”的情况下,第二齿轮系37的齿轮传动比u2成为:
[0104]
u2=0.50。
[0105]
使第一行星齿轮22的齿数z
p1
与第二行星齿轮23的齿数z
p2
彼此不同,由此第一齿轮系36的齿轮传动比u1与第二齿轮系37的齿轮传动比u2彼此不同。
[0106]
如上所述,第一控制行星齿轮机构29中的第一齿轮系36的齿轮传动比u1与第二控制行星齿轮机构30中的第二齿轮系37的齿轮传动比u2彼此不同,由此,在第一驱动轴3的转速与第二驱动轴4的转速相等的状态下,在第一控制行星齿轮机构29和第二控制行星齿轮机构30分别传递转矩时,该第一控制行星齿轮机构29中的第一齿轮系36与第二控制行星齿轮机构30中的第二齿轮系37彼此干扰。在图1所示的例子中,第一齿轮系36中的第一行星齿轮22的齿数z
p1
(36)比包括第三太阳轮27和第三行星齿轮24的齿轮系中的第三行星齿轮24的齿数z
p3
(35)多一齿,由此第一齿轮系36中的第一太阳轮25欲比第三太阳轮27快一齿地旋转。另一方面,第二齿轮系37中的第二行星齿轮23的齿数z
p2
(34)比第三太阳轮27和第三行星齿轮24的齿轮系中的第三行星齿轮24的齿数z
p3
(35)少一齿,由此第二齿轮系37中的第二太阳轮26欲比第三太阳轮27慢一齿地旋转。因此,第一太阳轮25与第二太阳轮26欲相对地向彼此相反的方向旋转。在该情况下,跟第一太阳轮25啮合的第一行星齿轮22与跟第二太阳轮26啮合的第二行星齿轮23一体地自转并且公转,在自转方向和公转方向上均不相对旋转。因此,彼此相反方向的转矩作用于第一齿轮系36的啮合部和第二齿轮系37的啮合部,从而第一齿轮系36与第二齿轮系37彼此干扰。其结果是,反转机构6实质上成为卡合状态,成为一体地旋转。因此,第一驱动轴3和第二驱动轴4成为一体地旋转,而不会进行差动旋转。
[0107]
相对于此,在第一驱动轴3的转速与第二驱动轴4的转速之间存在转速差的状态下,因如上所述的第一齿轮系36与第二齿轮系37之间的齿轮的干扰而产生的反转机构6的实质上的卡合状态被解除,第一控制行星齿轮机构29和第二控制行星齿轮机构30分别根据第一齿轮系36的齿轮传动比u1和第二齿轮系37的齿轮传动比u2来传递转矩。在图1所示的例子中,第一齿轮系36与第二齿轮系37进行差动旋转,由此反转机构6的实质上的卡合状态被解除。在该情况下,如上所述,彼此相反方向的转矩作用于第一齿轮系36的啮合部和第二齿轮系37的啮合部。因此,第一太阳轮25和第二太阳轮26向彼此相反的方向相对旋转。即,第一太阳轮25和第二太阳轮26以第二太阳轮26相对于第一太阳轮25反转的方式分别旋转。其结果是,第一驱动轴3和第二驱动轴4以一方的驱动轴3(或4)相对于另一方的驱动轴4(或3)反转的方式分别旋转。即,第一驱动轴3和第二驱动轴4进行差动旋转并且向彼此相反的方向相对旋转。
[0108]
而且,反转机构6被配置为:表示第一控制输出元件32的转速相对于控制输入元件31的转速的比例的第一减速比和表示第二控制输出元件34的转速相对于控制输入元件31的转速的比例的第二减速比均大于“1”。在图1所示的例子中,被配置为轮架28与第一太阳轮25之间的第一减速比和轮架28与第二太阳轮26之间的第二减速比均大于“1”。因此,第一控制行星齿轮机构29和第二控制行星齿轮机构30分别形成使第一太阳轮25和第二太阳轮26的输出转速相对于轮架28的输入转速进行减速的减速齿轮机构。因此,如下所述,第一控制行星齿轮机构29和第二控制行星齿轮机构30将输入至轮架28的致动器5的控制转矩放大并向第一驱动轴3侧和第二驱动轴4侧传递。
[0109]
例如,如上述的例子那样,在第一行星齿轮22的齿数z
p1
为“36”、第一太阳轮25的齿数z
s1
为“68”、第二行星齿轮23的齿数z
p2
为“34”、第二太阳轮26的齿数z
s2
为“68”、第三行星齿轮24的齿数z
p3
为“35”、第三太阳轮27的齿数z
s3
为“68”的情况下,第一控制行星齿轮机构29的第一减速比r1和第二控制行星齿轮机构30的第二减速比r2分别成为:
[0110]
r1=1/{1-(z
s3
/z
p3
)
×
(z
p1
/z
s1
)}≈35;
[0111]
r2=1/{1-(z
s3
/z
p3
)
×
(z
p2
/z
s2
)}≈-35。
[0112]
与以往的通过一般的行星齿轮机构所能实现的减速比大致为4至10左右的情况相比,得到了相对大的减速比。
[0113]
需要说明的是,在第一控制行星齿轮机构29中,差动机构2的第一差动反作用力元件19(即轮架28)的旋转方向与差动机构2的第一动力输出元件18(即第一太阳轮25)的旋转方向成为相同的旋转方向,在该第一差动反作用力元件19与第一动力输出元件18之间传递控制转矩。另一方面,在第二控制行星齿轮机构30中,相对于差动机构2的第二差动反作用力元件21(即轮架28)的旋转方向,差动机构2的第二动力输出元件20(即第二太阳轮26)的旋转方向被反转,在该第二差动反作用力元件21与第二动力输出元件20之间传递控制转矩。因此,如果将第一控制行星齿轮机构29中的第一动力输出元件18的旋转方向设为正旋转方向,则第二控制行星齿轮机构30中的第二动力输出元件20的旋转方向成为负旋转方向或逆旋转方向。因此,在本发明的实施方式的说明中,为了方便,对第二控制行星齿轮机构30的第二减速比r2标注了负(-)的符号。在图1所示的例子中,将反转机构6中的致动器5与第一驱动轴3和第二驱动轴4之间的减速比r表示为“r=
±
35”。
[0114]
如此,在本发明的实施方式的转矩矢量分配装置tv中,反转机构6中的第一控制行星齿轮机构29和第二控制行星齿轮机构30均形成减速比大于“1”的减速齿轮机构。即,反转机构6除了具备在第一驱动轴3与第二驱动轴4进行差动旋转时使该第一驱动轴3和第二驱动轴4向彼此相反的旋转方向相对旋转的反转功能之外,还具备将致动器5的控制转矩放大的减速功能(转矩放大功能)。在上述的图1所示的例子中,具有减速比成为“35”的大的转矩放大功能。因此,根据本发明的实施方式的转矩矢量分配装置tv,能与通过反转机构6的减速功能来放大控制转矩相应地谋求致动器5的小型化。因此,能使转矩矢量分配装置tv小型化。
[0115]
此外,对于本发明的实施方式的转矩矢量分配装置tv而言,反转机构6成为单轴构造。因此,能容易地构成兼具如上所述的反转功能和减速功能的反转机构6而不必使用复杂的构造。此外,通过将反转机构6与第一驱动轴3和第二驱动轴4配置在同轴上,能抑制转矩矢量分配装置tv向径向的大型化。而且,能通过反转机构6的减速功能来使致动器5小型化。
因此,根据本发明的实施方式的转矩矢量分配装置tv,能容易地谋求反转机构6和致动器5的小型化,进而,能使转矩矢量分配装置tv的外形小型化。其结果是,能容易地将小型化后的转矩矢量分配装置tv搭载于车辆。
[0116]
需要说明的是,上述的第一行星齿轮22、第二行星齿轮23和第三行星齿轮24、以及第一太阳轮25、第二太阳轮26和第三太阳轮27的排列顺序并不限定于图1所示的顺序。例如,也可以是将第一行星齿轮22和第一太阳轮25与第二行星齿轮23和第二太阳轮26交换配置而成的构成。或者,也可以是将第三行星齿轮24和第三太阳轮27配置于图1的右侧而成的构成。
[0117]
在图2至图22中示出应用了本发明的转矩矢量分配装置tv的其他实施例。需要说明的是,在以下图示说明的转矩矢量分配装置tv中,对于构成、功能与上述的图1或者已经出现的附图中示出的转矩矢量分配装置tv相同的构件或部件等,标注了与在图1或者已经出现的附图中使用的参照附图标记相同的参照附图标记。
[0118]
〔第二实施例〕
[0119]
图2所示的转矩矢量分配装置tv具备输入构件41来代替图1中示出的转矩矢量分配装置tv中的输入构件1。输入构件41被输入规定的动力源所输出的动力转矩。输入构件41是设有后述的输入齿轮42的旋转轴,在与旋转轴线al正交的旋转轴线方向上,可旋转地支承于转矩矢量分配装置tv的壳体7。
[0120]
在输入构件41的一方(图2的下侧)的端部装配有输入齿轮42。输入齿轮42与输入构件41一体地旋转。在图2所示的例子中,输入齿轮42是与后述的差速器齿圈43啮合的小直径的锥齿轮。动力转矩从动力源经由输入构件41被传递至输入齿轮42。输入齿轮42与差速器齿圈43啮合。差速器齿圈43是设于差速器壳体14的外周部分的大直径的锥齿轮。差速器齿圈43与差速器壳体14一体地旋转。需要说明的是,输入齿轮42和差速器齿圈43例如也可以使用准双曲面齿轮(hypoid gear)来构成。
[0121]
在输入构件41的另一方(图2的上侧)的端部例如连结有图1中示出的电动马达8、制动机构9等动力源的输出轴。从差速器壳体14经由差动机构2和反转机构6到第一驱动轴3和第二驱动轴4的构成与图1中示出的转矩矢量分配装置tv相同。
[0122]
如此,根据图2所示的转矩矢量分配装置tv,能构成与动力源分体的、具有转矩矢量分配功能的差动装置。因此,例如,能替换现有的车辆中的以往的差动装置,容易地将转矩矢量分配装置tv作为带有转矩矢量分配功能的差动装置搭载于车辆。
[0123]
〔第三实施例〕
[0124]
在图3所示的转矩矢量分配装置tv中,输入构件41的输入齿轮42与差速器齿圈51啮合。差速器齿圈51是与输入齿轮42(小直径的锥齿轮)对应的大直径的锥齿轮。差速器齿圈51装配于第三太阳轮27的第三太阳轮轴27a。差速器齿圈51与第三太阳轮轴27a一体地旋转。因此,动力源所产生的动力转矩经由输入构件41、输入齿轮42以及差速器齿圈51被传递至第三太阳轮27。因此,在该图3所示的转矩矢量分配装置tv中,第三太阳轮27也成为差动机构2的动力输入元件17。
[0125]
差动机构2中的轮架28未连结于任何旋转构件。因此,轮架28成为自由旋转的状态。轮架28被支承为可与第三太阳轮轴27a和第二驱动轴4相对旋转。
[0126]
差动机构2具有与第三行星齿轮24啮合的内齿齿轮的齿圈52。与齿圈52一体地旋
转的齿圈轴52a连结于致动器5的控制转矩输出轴5a。齿圈52与控制转矩输出轴5a一体地旋转。齿圈52的转矩经由第三行星齿轮24以及第一行星齿轮22和第二行星齿轮23被传递至第一太阳轮25和第二太阳轮26。因此,从致动器5传递至齿圈52的控制转矩作为对从动力输入元件17(即第三太阳轮27)传递至第一动力输出元件18(即第一太阳轮25)的动力转矩和从动力输入元件17传递至第二动力输出元件20(即第二太阳轮26)的动力转矩的反作用力发挥作用。因此,齿圈52成为差动机构2的第一差动反作用力元件19和第二差动反作用力元件21。
[0127]
如上所述,致动器5的控制转矩经由齿圈52被传递至反转机构6。因此,与如图1中示出的转矩矢量分配装置tv那样经由轮架28将致动器5的控制转矩传递至反转机构6的构成相比,能增大反转机构6中的致动器5与第一驱动轴3和第二驱动轴4之间的减速比r。
[0128]
例如,如上述的例子那样,在第一行星齿轮22的齿数为“36”、第一太阳轮25的齿数为“68”、第二行星齿轮23的齿数为“34”、第二太阳轮26的齿数为“68”、第三行星齿轮24的齿数为“35”、第三太阳轮27的齿数为“68”的情况下,图1中示出的转矩矢量分配装置tv中的减速比r为“r=
±
35”,相对于此,当将齿圈52的齿数设为“138”时,该图3所示的转矩矢量分配装置tv中的减速比r成为“r=
±
52”。与图1中示出的转矩矢量分配装置tv相比,得到了约1.5倍大的减速比。
[0129]
如此,根据图3所示的转矩矢量分配装置tv,通过追加作为差动机构2的反作用力元件并且成为致动器5的控制转矩向反转机构6的输入构件的齿圈52,与图1、图2中示出的例子相比,能得到更大的减速比。因此,能将致动器5的控制转矩放大得更大。因此,能谋求致动器5的进一步的小型化从而使转矩矢量分配装置tv小型化。
[0130]
〔第四实施例〕
[0131]
在图4所示的转矩矢量分配装置tv中,装配于输入构件1的小齿轮10与减速齿轮61的大直径齿轮61a啮合。减速齿轮61具有分别在同轴上串联地配置并且一体地旋转的大直径齿轮61a和小直径齿轮61b。大直径齿轮61a的直径比小齿轮10大,齿数比小齿轮10多。小直径齿轮61b与设于后述的第三齿圈65的外周部分的外齿齿轮的差速器齿圈62啮合。小直径齿轮61b的直径比差速器齿圈62小,齿数比差速器齿圈62少。因此,由小齿轮10、大直径齿轮61a、小直径齿轮61b以及差速器齿圈62构成的齿轮系形成使差速器齿圈62的输出转速相对于小齿轮10的输入转速进行减速的减速齿轮机构。因此,输入至输入构件1的动力源(在图4所示的例子中为电动马达8和制动机构9)的动力转矩被包括如上所述的小齿轮10、减速齿轮61以及差速器齿圈62的变速齿轮机构放大,并被传递至差动机构2的第三齿圈65。
[0132]
差动机构2具有:第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24这三组行星齿轮;第一齿圈63、第二齿圈64以及第三齿圈65这三个齿圈;以及轮架28。第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24在同轴上串联地配置。第一齿圈63、第二齿圈64以及第三齿圈65在同轴上串联地配置。第一齿圈63与第二齿圈64与第三齿圈65彼此相对旋转。第一行星齿轮22与第一齿圈63啮合。第二行星齿轮23与第二齿圈64啮合。第三行星齿轮24与第三齿圈65啮合。
[0133]
第一齿圈63连结于第一驱动轴3。第一齿圈63与第一驱动轴3一体地旋转。第二齿圈64连结于第二驱动轴4。第二齿圈64与第二驱动轴4一体地旋转。第三齿圈65连结于差速器齿圈62。第三齿圈65与差速器齿圈62一体地旋转。
[0134]
此外,轮架28连结于致动器5的控制转矩输出轴5a。轮架28与控制转矩输出轴5a一体地旋转。轮架28的转矩经由第一行星齿轮22和第二行星齿轮23被传递至第一齿圈63和第二齿圈64。因此,从致动器5传递至轮架28的控制转矩作为对从第三齿圈65经由第三行星齿轮24和第一行星齿轮22传递至第一齿圈63的动力转矩以及从第三齿圈65经由第三行星齿轮24和第二行星齿轮23传递至第二齿圈64的动力转矩的反作用力发挥作用。
[0135]
因此,第三齿圈65成为差动机构2的动力输入元件17,第一齿圈63成为差动机构2的第一动力输出元件18,轮架28成为差动机构2的第一差动反作用力元件19,从而构成第一动力行星齿轮机构15。此外,第三齿圈65成为差动机构2的动力输入元件17,第二齿圈64成为差动机构2的第二动力输出元件20,轮架28成为差动机构2的第二差动反作用力元件21,从而构成第二动力行星齿轮机构16。
[0136]
反转机构6具有:第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24这三组行星齿轮;第一齿圈63、第二齿圈64以及第三齿圈65这三个齿圈;以及轮架28。轮架28连结于致动器5的控制转矩输出轴5a。第一齿圈63连结于差动机构2的第一动力输出元件18、即第一驱动轴3。第一齿圈63与第一行星齿轮22彼此啮合。此外,第二齿圈64连结于差动机构2的第二动力输出元件20、即第二驱动轴4。第二齿圈64与第二行星齿轮23彼此啮合。
[0137]
因此,轮架28成为控制输入元件31,第一齿圈63作为第一齿轮33而成为第一控制输出元件32,从而构成第一控制行星齿轮机构29。此外,轮架28成为控制输入元件31,第二齿圈64作为第二齿轮35而成为第二控制输出元件34,从而构成第二控制行星齿轮机构30。
[0138]
在图4所示的例子中,包括第一行星齿轮22和第一齿轮33(即第一齿圈63)的第一齿轮系66的齿轮传动比与包括第二行星齿轮23和第二齿轮35(即第二齿圈64)的第二齿轮系67的齿轮传动比彼此不同。具体而言,第一齿轮系66中的第一行星齿轮22和第一齿圈63的齿轮副的齿轮传动比与第二齿轮系67中的第二行星齿轮23和第二齿圈64的齿轮副的齿轮传动比彼此不同。
[0139]
更具体而言,第一齿圈63的齿数与第二齿圈64的齿数与第三齿圈65的齿数均相等。第一行星齿轮22的齿数、第二行星齿轮23的齿数以及第三行星齿轮24的齿数均少于各齿圈63、64、65的齿数。并且,第一行星齿轮22的齿数多于第三行星齿轮24的齿数,并且第二行星齿轮23的齿数少于第三行星齿轮24的齿数。例如,如图4中括号内的数值所示,各齿圈63、64、65的齿数为“68”,第一行星齿轮22的齿数为“36”,第二行星齿轮23的齿数为“34”,第三行星齿轮24的齿数为“35”。在该情况下,减速比r成为“r=
±
35”。
[0140]
根据该图4所示的转矩矢量分配装置tv,与上述的图1、图2中示出的例子同样地,能与通过反转机构6的减速功能来放大控制转矩相应地谋求致动器5的小型化。此外,能容易地构成单轴构造的反转机构6。此外,通过将反转机构6与第一驱动轴3和第二驱动轴4配置在同轴上,能抑制转矩矢量分配装置tv向径向的大型化。除此之外,在该图4所示的转矩矢量分配装置tv中,设有分别与各行星齿轮22、23、24啮合的各齿圈63、64、65,由此能通过各齿圈63、64、65来抑制在转矩矢量分配装置tv旋转时产生的轮架28的离心力的增大。因此,在设计上,能使轮架28的强度降低,与之相应地,能谋求差动机构2和反转机构6的小型化。此外,在该图4所示的转矩矢量分配装置tv中,第一动力行星齿轮机构15和第二动力行星齿轮机构16以及第一控制行星齿轮机构29和第二控制行星齿轮机构30均由各行星齿轮22、23、24、轮架28以及各齿圈63、64、65构成。即,不使用太阳轮来构成第一动力行星齿轮机
构15和第二动力行星齿轮机构16以及第一控制行星齿轮机构29和第二控制行星齿轮机构30。因此,不需要供直径比各行星齿轮22、23、24大并且齿数比各行星齿轮22、23、24多的太阳轮配置的空间,与之相应地,能使径向的外形小型化。
[0141]
〔第五实施例、第六实施例、第七实施例、第八实施例〕
[0142]
在图5、图6、图7、图8所示的转矩矢量分配装置tv中,差动机构2具有:第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24这三组行星齿轮;第一太阳轮25、第二太阳轮26以及第三太阳轮27这三个太阳轮;以及轮架28。
[0143]
第三太阳轮27连结于差速器齿圈43(或51、62)。第三太阳轮27与差速器齿圈43(或51、62)一体地旋转。第一太阳轮25连结于第一驱动轴3。第一太阳轮25与第一驱动轴3一体地旋转。第二太阳轮26连结于第二驱动轴4。第二太阳轮26与第二驱动轴4一体地旋转。
[0144]
因此,第三太阳轮27成为差动机构2的动力输入元件17,第一太阳轮25成为差动机构2的第一动力输出元件18,轮架28成为差动机构2的第一差动反作用力元件19,从而构成第一动力行星齿轮机构15。此外,第三太阳轮27成为差动机构2的动力输入元件17,第二太阳轮26成为差动机构2的第二动力输出元件20,轮架28成为差动机构2的第二差动反作用力元件21,从而构成第二动力行星齿轮机构16。
[0145]
反转机构6具有:第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24这三组行星齿轮;第一太阳轮25、第二太阳轮26以及第三太阳轮27这三个太阳轮;以及轮架28。而且,减速行星齿轮机构71与反转机构6、第一驱动轴3以及第二驱动轴4设在同轴上。
[0146]
减速行星齿轮机构71由单行星型的行星齿轮机构构成。减速行星齿轮机构71具有太阳轮71a、齿圈71b以及轮架71c。太阳轮71a连结于致动器5的控制转矩输出轴5a。太阳轮71a与控制转矩输出轴5a一体地旋转。齿圈71b形成于连结有差速器齿圈43(或51、62)的差速器壳体14的内周部分。或者,齿圈71b连结于差速器壳体14。齿圈71b与差速器壳体14一体地旋转。轮架71c将减速行星齿轮机构71的行星齿轮71d支承为能自转且能公转。轮架71c与轮架28一体地旋转。因此,减速行星齿轮机构71在致动器5与轮架28之间将致动器5所输出的控制转矩放大并传递至轮架28。
[0147]
减速行星齿轮机构71的太阳轮71a相当于反转机构6的第四太阳轮。因此,减速行星齿轮机构71由第四太阳轮71a、齿圈71b以及轮架71c构成。因此,第四太阳轮71a成为控制输入元件31,第一太阳轮25作为第一齿轮33而成为第一控制输出元件32,从而复合地构成第一控制行星齿轮机构29。此外,第四太阳轮71a成为控制输入元件31,第二太阳轮26作为第二齿轮35而成为第二控制输出元件34,从而复合地构成第二控制行星齿轮机构30。
[0148]
减速行星齿轮机构71的与第四太阳轮71a和齿圈71b啮合的行星齿轮71d相当于反转机构6的第四行星齿轮。因此,减速行星齿轮机构71具有同时与第四太阳轮71a和齿圈71b啮合的第四行星齿轮71d。减速行星齿轮机构71的第四行星齿轮71d与第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24配置在同轴上,并且被配置为能与第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24彼此相对旋转。并且,减速行星齿轮机构71的轮架71c与轮架28兼用。即,轮架28将减速行星齿轮机构71的第四行星齿轮71d与第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24一起分别保持为能自转且能公转。
[0149]
在上述的反转机构6中,轮架28经由减速行星齿轮机构71连结于致动器5的控制转矩输出轴5a。第一太阳轮25连结于差动机构2的第一动力输出元件18、即第一驱动轴3。第一
太阳轮25与第一行星齿轮22彼此啮合。此外,第二太阳轮26连结于差动机构2的第二动力输出元件20、即第二驱动轴4。第二太阳轮26与第二行星齿轮23彼此啮合。
[0150]
因此,轮架28成为控制输入元件31,第一太阳轮25作为第一齿轮33而成为第一控制输出元件32,从而构成第一控制行星齿轮机构29。此外,轮架28成为控制输入元件31,第二太阳轮26作为第二齿轮35而成为第二控制输出元件34,从而构成第二控制行星齿轮机构30。
[0151]
在图5、图6、图7、图8所示的例子中,包括第一行星齿轮22和第一齿轮33(即第一太阳轮25)的第一齿轮系72的齿轮传动比与包括第二行星齿轮23和第二齿轮35(即第二太阳轮26)的第二齿轮系73的齿轮传动比彼此不同。具体而言,第一齿轮系72中的第一行星齿轮22和第一太阳轮25的齿轮副的齿轮传动比与第二齿轮系73中的第二行星齿轮23和第二太阳轮26的齿轮副的齿轮传动比彼此不同。
[0152]
更具体而言,第一太阳轮25的齿数与第二太阳轮26的齿数与第三太阳轮27的齿数均相等。第一行星齿轮22的齿数、第二行星齿轮23的齿数以及第三行星齿轮24的齿数均少于各太阳轮25、26、27的齿数。并且,第一行星齿轮22的齿数多于第三行星齿轮24的齿数,并且第二行星齿轮23的齿数少于第三行星齿轮24的齿数。
[0153]
例如,在图5所示的例子中,各太阳轮25、26、27的齿数为“40”,第一行星齿轮22的齿数为“21”,第二行星齿轮23的齿数为“19”,第三行星齿轮24的齿数为“20”。并且,在该图5所示的例子中,减速行星齿轮机构71中的太阳轮71a的齿数为“40”,齿圈71b的齿数为“80”,行星齿轮71d的齿数为“20”。在该情况下,减速比r成为“r=
±
60”。通过设置减速行星齿轮机构71,与上述的图1、图2中示出的例子相比,能得到更大的减速比。
[0154]
此外,在图6、图7所示的例子中,减速行星齿轮机构71中的太阳轮71a的齿数为“30”,齿圈71b的齿数为“90”,行星齿轮71d的齿数为“30”。在该情况下,减速比r成为“r=
±
80”。通过设置减速行星齿轮机构71,与上述的图1、图2中示出的例子和图5中示出的例子相比,能得到更大的减速比。
[0155]
此外,在图8所示的例子中,减速行星齿轮机构71中的太阳轮71a的齿数为“25”,齿圈71b的齿数为“60”,行星齿轮71d的齿数为“20”。在该情况下,减速比r成为“r=
±
72”。通过设置减速行星齿轮机构71,与上述的图1、图2中示出的例子和图5中示出的例子相比,能得到更大的减速比。
[0156]
在上述的图5、图6、图7、图8所示的例子中,减速行星齿轮机构71与第一驱动轴3和第二驱动轴4配置在同轴上。具体而言,第一驱动轴3、第二驱动轴4、反转机构6以及减速行星齿轮机构71均配置在同一旋转轴线al上。因此,即使是追加减速行星齿轮机构71的构成,也能兼用轴承来简化。因此,能容易地设置减速行星齿轮机构71。
[0157]
需要说明的是,在图8所示的例子中,设有电动马达8来作为动力源。在该图8所示的例子中,电动马达8与第一驱动轴3和第二驱动轴4配置在同轴上。具体而言,第一驱动轴3、第二驱动轴4、反转机构6以及电动马达8均配置在同一旋转轴线al上。此外,设有将电动马达8所输出的动力转矩放大的减速机构74。在图8所示的例子中,减速机构74由将两组行星齿轮机构组合而成的复合行星齿轮机构构成。
[0158]
减速机构(即复合行星齿轮机构)74具有第一太阳轮74a、第二太阳轮74b、齿圈74c、第一轮架74d、第二轮架74e、第一行星齿轮74f以及第二行星齿轮74g。第一太阳轮74a
与第二太阳轮74b在同轴上串联地配置,并且一体地旋转。第一行星齿轮74f与第一太阳轮74a啮合。第一行星齿轮74f也与内齿齿轮的齿圈74c啮合。第二行星齿轮74g与第二太阳轮74b啮合。第二行星齿轮74g也与齿圈74c啮合。第一轮架74d将第一行星齿轮74f保持为能自转。第二轮架74e将第二行星齿轮74g保持为能自转并且能绕第二太阳轮74b公转。第一轮架74d与第二轮架74e在同轴上串联地配置。第二轮架74e与第一轮架74d相对旋转。
[0159]
上述的第一太阳轮74a和第二太阳轮74b作为输入构件75连结于电动马达8的动力转矩输出轴8a。第一轮架74d不能旋转地固定于壳体7。并且,第二轮架74e连结于差速器壳体14和差动机构2的第三太阳轮27。因此,减速机构74使第二轮架74e和差动机构2的第三太阳轮27即差动机构2的动力输入元件17的转速相对于第一太阳轮74a和第二太阳轮74b即输入构件75的输入转速进行减速。因此,减速机构74将动力源所产生的动力转矩放大并向差动机构2的动力输入元件17传递。
[0160]
如上所述,在图8所示的例子中,电动马达8即动力源和减速机构74与第一驱动轴3和第二驱动轴4配置在同轴上。具体而言,第一驱动轴3、第二驱动轴4、反转机构6、电动马达8以及减速机构74均配置在同一旋转轴线al上。因此,该图8所示的转矩矢量分配装置tv的主要构成元件成为所谓的单轴构造。因此,能抑制转矩矢量分配装置tv向径向的大型化,使转矩矢量分配装置tv的外形小型化。此外,如图8所示,能构成圆筒状的简单外观的转矩矢量分配装置tv。其结果是,能容易地将小型化且简化后的转矩矢量分配装置tv搭载于车辆。
[0161]
在上述的第一实施例(图1)、第二实施例(图2)、第三实施例(图3)、第四实施例(图4)、第五实施例(图5)、第六实施例(图6)、第七实施例(图7)以及第八实施例(图8)的各转矩矢量分配装置tv中,共用第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24来构成差动机构2和反转机构6。第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24在同轴上串联地配置。第一行星齿轮22、第二行星齿轮23以及第三行星齿轮24由一个轮架28分别保持为能自转且能公转。第一行星齿轮22与第二行星齿轮23与第三行星齿轮24在自转方向上一体地旋转。并且,第三行星齿轮24与成为动力输入元件17的第三太阳轮27或第三齿圈65啮合。即,第三行星齿轮24从动力输入元件17被传递动力转矩。
[0162]
〔第九实施例〕
[0163]
在图9所示的转矩矢量分配装置tv中,差动机构2具有:第一行星齿轮81、第二行星齿轮82、第三行星齿轮83以及第四行星齿轮84这四组行星齿轮;第一齿圈85、第二齿圈86、第三齿圈87以及第四齿圈88这四个齿圈;以及轮架89。
[0164]
第一行星齿轮81、第二行星齿轮82、第三行星齿轮83以及第四行星齿轮84分别在同轴上串联地配置。此外,第一行星齿轮81、第二行星齿轮82、第三行星齿轮83以及第四行星齿轮84分别由轮架89保持为能自转且能公转。第一行星齿轮81与第三行星齿轮83在自转方向上一体地旋转。第二行星齿轮82与第四行星齿轮84在自转方向上一体地旋转。第一行星齿轮81和第三行星齿轮83与第二行星齿轮82和第四行星齿轮84能彼此相对旋转。
[0165]
第一齿圈85、第二齿圈86、第三齿圈87以及第四齿圈88分别在同轴上串联地配置。第一齿圈85是内齿齿轮,与第一行星齿轮81啮合。第二齿圈86是内齿齿轮,与第二行星齿轮82啮合。第三齿圈87是内齿齿轮,与第三行星齿轮83啮合。第四齿圈88是内齿齿轮,与第四行星齿轮84啮合。第三齿圈87与第四齿圈88一体地旋转。第一齿圈85与第二齿圈86与第三齿圈87和第四齿圈88能彼此相对旋转。
[0166]
第三齿圈87和第四齿圈88均连结于差速器齿圈62。第三齿圈87和第四齿圈88与差速器齿圈62一体地旋转。第一齿圈85连结于第一驱动轴3。第一齿圈85与第一驱动轴3一体地旋转。第二齿圈86连结于第二驱动轴4。第二齿圈86与第二驱动轴4一体地旋转。
[0167]
因此,第三齿圈87成为差动机构2的动力输入元件17,第一齿圈85成为差动机构2的第一动力输出元件18,轮架89成为差动机构2的第一差动反作用力元件19,从而构成第一动力行星齿轮机构15。此外,第四齿圈88成为差动机构2的动力输入元件17,第二齿圈86成为差动机构2的第二动力输出元件20,轮架89成为差动机构2的第二差动反作用力元件21,从而构成第二动力行星齿轮机构16。
[0168]
反转机构6具有:第一行星齿轮81、第二行星齿轮82、第三行星齿轮83以及第四行星齿轮84这四组行星齿轮;第一齿圈85、第二齿圈86、第三齿圈87以及第四齿圈88这四个齿圈;以及轮架89。轮架89连结于致动器5的控制转矩输出轴5a。第一齿圈85连结于差动机构2的第一动力输出元件18、即第一驱动轴3。第一齿圈85与第一行星齿轮81彼此啮合。此外,第二齿圈86连结于差动机构2的第二动力输出元件20、即第二驱动轴4。第二齿圈86与第二行星齿轮82彼此啮合。
[0169]
因此,轮架89成为控制输入元件31,第一齿圈85作为第一齿轮33而成为第一控制输出元件32,从而构成第一控制行星齿轮机构29。此外,轮架89成为控制输入元件31,第二齿圈86作为第二齿轮35而成为第二控制输出元件34,从而构成第二控制行星齿轮机构30。
[0170]
在图9所示的例子中,包括第一行星齿轮81和第一齿轮33(即第一齿圈85)的第一齿轮系90的齿轮传动比与包括第二行星齿轮82和第二齿轮35(即第二齿圈86)的第二齿轮系91的齿轮传动比彼此不同。具体而言,第一齿轮系90中的第一行星齿轮81、第三行星齿轮83和第一齿圈85的齿轮副的齿轮传动比与第二齿轮系91中的第二行星齿轮82、第四行星齿轮84和第二齿圈86的齿轮副的齿轮传动比彼此不同。
[0171]
更具体而言,第一行星齿轮81的齿数与第二行星齿轮82的齿数与第三行星齿轮83的齿数与第四行星齿轮84的齿数均相等。第一齿圈85的齿数、第二齿圈86的齿数、第三齿圈87的齿数以及第四齿圈88的齿数均多于各行星齿轮81、82、83、84的齿数。此外,第一齿圈85的齿数与第二齿圈86的齿数相等。并且,第三齿圈87的齿数少于第一齿圈85和第二齿圈86的齿数,并且第四齿圈88的齿数多于第一齿圈85和第二齿圈86的齿数。
[0172]
例如,在该图9所示的例子中,各行星齿轮81、82、83、84的齿数为“17”,第一齿圈85和第二齿圈86的齿数为“60”,第三齿圈87的齿数为“59”,第四齿圈88的齿数为“61”。在该情况下,减速比r成为“r=
±
60”。通过设置如上所述的四个齿圈85、86、87、88和与各齿圈85、86、87、88啮合的四组行星齿轮81、82、83、84,例如与上述的图1、图2中示出的例子相比,能得到更大的减速比。
[0173]
在上述的第九实施例(图9)的转矩矢量分配装置tv中,共用第一行星齿轮81、第二行星齿轮82、第三行星齿轮83以及第四行星齿轮84来构成差动机构2和反转机构6。第一行星齿轮81、第二行星齿轮82、第三行星齿轮83以及第四行星齿轮84在同轴上串联地配置。第一行星齿轮81、第二行星齿轮82、第三行星齿轮83以及第四行星齿轮84由一个轮架89分别保持为能自转且能公转。第一行星齿轮81与第三行星齿轮83在自转方向上一体地旋转。此外,第二行星齿轮82与第四行星齿轮84在自转方向上一体地旋转。第一行星齿轮81和第三行星齿轮83与第二行星齿轮82和第四行星齿轮84能彼此相对旋转。并且,第三行星齿轮83
和第四行星齿轮84分别与成为动力输入元件17的第三齿圈87和第四齿圈88啮合。即,第三行星齿轮83和第四行星齿轮84从动力输入元件17被传递动力转矩。
[0174]
需要说明的是,上述的第一行星齿轮81、第二行星齿轮82、第三行星齿轮83和第四行星齿轮84、以及第一齿圈85、第二齿圈86、第三齿圈87和第四齿圈88的排列顺序并不限定于图9所示的顺序。例如,也可以是将第一行星齿轮81和第三行星齿轮83以及第一齿圈85和第三齿圈87与第二行星齿轮82和第四行星齿轮84以及第二齿圈86和第四齿圈88交换配置而成的构成。
[0175]
对于上述的第一实施例(图1)、第二实施例(图2)、第三实施例(图3)、第四实施例(图4)、第五实施例(图5)、第六实施例(图6)、第七实施例(图7)、第八实施例(图8)以及第九实施例(图9)的各转矩矢量分配装置tv中的差动机构2而言,均为输入构件1(或41)与动力输入元件17连结。第一动力输出元件18与第一驱动轴3连结。第二动力输出元件20与第二驱动轴4连结。此外,对于上述的第一实施例至第九实施例的各转矩矢量分配装置tv中的反转机构6而言,均为致动器5与控制输入元件31连结。第一齿轮33形成第一控制输出元件32。第二齿轮35形成第二控制输出元件34。并且,反转机构6均被配置为将输入至控制输入元件31的控制转矩放大并传递至第一驱动轴3和第二驱动轴4。
[0176]
因此,根据上述的第一实施例至第九实施例的各转矩矢量分配装置tv,能通过反转机构6将致动器5的控制转矩放大并传递至第一驱动轴3和第二驱动轴4。因此,能与通过反转机构6的减速功能来放大控制转矩相应地谋求致动器5的小型化。进而,能使转矩矢量分配装置tv的外形小型化。其结果是,能容易地将小型化后的转矩矢量分配装置tv搭载于车辆。
[0177]
〔第十实施例〕
[0178]
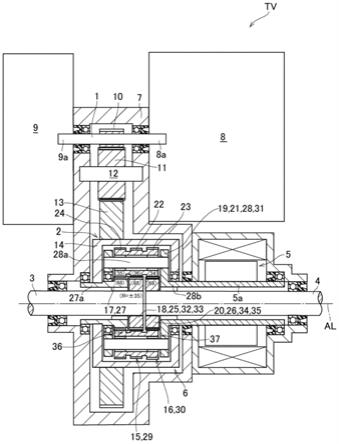
在图10中示出应用了本发明的转矩矢量分配装置的其他例子。本发明的实施方式的转矩矢量分配装置tv具备输入构件101、差动机构102、第一驱动轴103、第二驱动轴104、致动器105以及反转机构106来作为主要构成元件。
[0179]
输入构件101被输入动力源所输出的动力转矩。在该图10所示的例子中,作为动力源,设有内置于转矩矢量分配装置tv的壳体107的电动马达108。电动马达108与上述的电动马达8同样地产生驱动转矩或再生转矩来作为动力转矩。电动马达108例如由永磁铁式的同步马达或者感应马达等构成。电动马达108的输出轴、即动力转矩输出轴108a形成为中空形状。动力转矩输出轴108a连结于后述的差动机构102的动力输入元件111,将动力转矩传递至动力输入元件111。与此同时,动力转矩输出轴108a形成输入构件101。因此,输入构件101具有向差动机构102侧传递动力转矩的中空形状的动力转矩输出轴108a。
[0180]
差动机构102由第一动力行星齿轮机构109和第二动力行星齿轮机构110构成。第一动力行星齿轮机构109和第二动力行星齿轮机构110分别在同轴上左右对置地配置。具体而言,第一驱动轴103和第二驱动轴104以及第一动力行星齿轮机构109和第二动力行星齿轮机构110配置在同一旋转轴线al上。
[0181]
第一动力行星齿轮机构109具有动力输入元件111、第一动力输出元件112以及第一差动反作用力元件113。动力输入元件111从输入构件101被传递动力转矩。第一动力输出元件112向第一驱动轴103输出动力转矩。后述的致动器105的控制转矩作为对从动力输入元件111传递至第一动力输出元件112的动力转矩的反作用力而被传递至第一差动反作用
力元件113。另一方面,第二动力行星齿轮机构110具有动力输入元件111、第二动力输出元件114以及第二差动反作用力元件115。动力输入元件111与上述的第一动力行星齿轮机构109兼用。第二动力输出元件114向第二驱动轴104输出动力转矩。后述的致动器105的控制转矩作为对从动力输入元件111传递至第二动力输出元件114的动力转矩的反作用力而被传递至第二差动反作用力元件115。在图10所示的例子中,第一差动反作用力元件113与第二差动反作用力元件115经由后述的反转机构106连结。
[0182]
第一动力行星齿轮机构109和第二动力行星齿轮机构110分别由将两组行星齿轮机构组合而成的复合行星齿轮机构构成。
[0183]
第一动力行星齿轮机构109具有第一太阳轮109a、第二太阳轮109b、轮架109c、第一行星齿轮109d以及第二行星齿轮109e。第一太阳轮109a与第二太阳轮109b在同轴上串联地配置。此外,第一太阳轮109a与第二太阳轮109b彼此相对旋转。第一行星齿轮109d与第一太阳轮109a啮合。第二行星齿轮109e与第二太阳轮109b啮合。轮架109c将第一行星齿轮109d和第二行星齿轮109e分别保持为能自转并且能绕第一太阳轮109a和第二太阳轮109b公转。第一行星齿轮109d与第二行星齿轮109e在自转方向上一体地旋转。第一动力行星齿轮机构109配置于动力转矩输出轴108a的中空部分。
[0184]
第二动力行星齿轮机构110具有第一太阳轮110a、第二太阳轮110b、轮架110c、第一行星齿轮110d以及第二行星齿轮110e。第一太阳轮110a与第二太阳轮110b在同轴上串联地配置。此外,第一太阳轮110a与第二太阳轮110b彼此相对旋转。第一行星齿轮110d与第一太阳轮110a啮合。第二行星齿轮110e与第二太阳轮110b啮合。轮架110c将第一行星齿轮110d和第二行星齿轮110e分别保持为能自转并且能绕第一太阳轮110a和第二太阳轮110b公转。第一行星齿轮110d与第二行星齿轮110e在自转方向上一体地旋转。第二动力行星齿轮机构110配置于动力转矩输出轴108a的中空部分和后述的控制转矩输出轴105a的中空部分。
[0185]
上述的轮架109c和轮架110c连结于作为输入构件101的电动马达108的动力转矩输出轴108a。具体而言,在第一动力行星齿轮机构109的轮架109c连接有电动马达108的动力转矩输出轴108a。第一动力行星齿轮机构109的第二太阳轮109b和第二动力行星齿轮机构110的第二太阳轮110b均形成为中空形状。在该第二太阳轮109b和第二太阳轮110b的中空部分配置有连结轴116。第二太阳轮109b和第二太阳轮110b与连结轴116彼此相对旋转。在连结轴116的两端部分分别连结有轮架109c和轮架110c。连结轴116与轮架109c和轮架110c一体地旋转。因此,动力转矩输出轴108a与轮架109c与轮架110c一体地旋转。
[0186]
因此,动力源所产生的动力转矩经由输入构件101即动力转矩输出轴108a被传递至轮架109c。与此同时,动力源所产生的动力转矩经由输入构件101即动力转矩输出轴108a和连结轴116被传递至轮架110c。因此,轮架109c和轮架110c成为差动机构102的动力输入元件111。
[0187]
第一动力行星齿轮机构109的第一太阳轮109a连结于第一驱动轴103。第一太阳轮109a与第一驱动轴103一体地旋转。因此,传递至差动机构102的动力转矩的一部分从第一太阳轮109a被输出至第一驱动轴103。因此,第一太阳轮109a成为差动机构102的第一动力输出元件112。
[0188]
第二动力行星齿轮机构110的第一太阳轮110a连结于第二驱动轴104。第一太阳轮
110a与第二驱动轴104一体地旋转。因此,传递至差动机构102的动力转矩的一部分从第一太阳轮110a被输出至第二驱动轴104。因此,第一太阳轮110a成为差动机构102的第二动力输出元件114。
[0189]
第一动力行星齿轮机构109的第二太阳轮109b连结于后述的反转机构106的第一太阳轮128。第二太阳轮109b与第一太阳轮128一体地旋转。从致动器105传递至反转机构106的第一太阳轮128的控制转矩的一部分作为对从动力输入元件111传递至第一动力输出元件112的动力转矩的反作用力发挥作用。因此,第一动力行星齿轮机构109的第二太阳轮109b成为差动机构102的第一差动反作用力元件113。
[0190]
第二动力行星齿轮机构110的第二太阳轮110b连结于后述的反转机构106的第二太阳轮129。第二太阳轮110b与第二太阳轮129一体地旋转。从致动器105传递至反转机构106的第二太阳轮129的控制转矩的一部分作为对从动力输入元件111传递至第二动力输出元件114的动力转矩的反作用力发挥作用。因此,第二动力行星齿轮机构110的第二太阳轮110b成为差动机构102的第二差动反作用力元件115。
[0191]
如此,在差动机构102中,轮架109c成为动力输入元件111,第一太阳轮109a成为第一动力输出元件112,第二太阳轮109b成为第一差动反作用力元件113,从而构成第一动力行星齿轮机构109。与此同时,轮架110c成为动力输入元件111,第一太阳轮110a成为第二动力输出元件114,第二太阳轮110b成为第二差动反作用力元件115,从而构成第二动力行星齿轮机构110。
[0192]
第一驱动轴103和第二驱动轴104在同轴上左右对置地配置。此外,第一驱动轴103和第二驱动轴104与第一动力行星齿轮机构109和第二动力行星齿轮机构110配置在同轴上。具体而言,第一驱动轴103和第二驱动轴104以及第一动力行星齿轮机构109和第二动力行星齿轮机构110配置在同一旋转轴线al上。第一驱动轴103与第二驱动轴104能彼此相对旋转。第一驱动轴103的突出侧(图10的右侧)的端部可旋转地支承于壳体107。同样地,第二驱动轴104的突出侧(图10的左侧)的端部可旋转地支承于壳体107。例如,在将本发明的实施方式的转矩矢量分配装置tv搭载于车辆的情况下,在第一驱动轴103和第二驱动轴104分别装配有驱动轮(未图示)。
[0193]
第一驱动轴103和第二驱动轴104分别连结于差动机构102的第一动力输出元件112和第二动力输出元件114。因此,第一驱动轴103与第二驱动轴104通过差动机构102的作用进行差动旋转。例如,在搭载有本发明的实施方式的转矩矢量分配装置tv的车辆进行转弯行驶的情况下,差动机构102作为车辆的差动装置发挥功能,根据内轮与外轮的转速差,第一驱动轴103与第二驱动轴104进行差动旋转。此外,在改变致动器105的控制转矩来控制针对左右的驱动轮的转矩分配的情况下,即在进行转矩矢量分配的情况下,第一驱动轴103与第二驱动轴104进行差动旋转。
[0194]
致动器105将由致动器105产生的转矩作为控制转矩而赋予差动机构102。差动机构102因控制转矩被赋予差动机构102的第一差动反作用力元件113和第二差动反作用力元件115而使第一驱动轴103与第二驱动轴104进行差动旋转。作为致动器105,例如可以使用电动马达或者制动机构。电动马达输出对第一差动反作用力元件113和第二差动反作用力元件115进行驱动的驱动转矩来作为控制转矩。或者,输出对第一差动反作用力元件113和第二差动反作用力元件115进行制动的再生转矩来作为控制转矩。制动机构输出对第一差
动反作用力元件113和第二差动反作用力元件115进行制动的制动转矩来作为控制转矩。例如,可以使用利用被通电而产生的磁吸引力来对规定的旋转构件进行制动的励磁工作型的电磁制动器、使用被电动马达驱动的进给丝杠机构来产生摩擦制动力的电动制动器等。
[0195]
致动器105具有输出如上所述的驱动转矩、再生转矩或制动转矩来作为控制转矩的控制转矩输出轴105a。在图10所示的例子中,使用了输出驱动转矩或再生转矩来作为控制转矩的电动马达。因此,电动马达的转子轴成为控制转矩输出轴105a。控制转矩输出轴105a连结于后述的反转机构106中的轮架132的轮架轴132a。此外,控制转矩输出轴105a形成为中空形状。在该控制转矩输出轴105a的中空部分配置有反转机构106和差动机构102的第二动力行星齿轮机构110。
[0196]
如上所述,在本发明的实施方式的转矩矢量分配装置tv中,可以使用电动马达或制动机构来作为致动器105。通过控制电动马达来改变控制转矩,能控制第一驱动轴103与第二驱动轴104之间的差动旋转。或者,通过控制制动机构来改变控制转矩,能控制第一驱动轴103与第二驱动轴104之间的差动旋转。此外,能通过电动马达的再生转矩或制动机构的制动转矩来限制第一驱动轴103与第二驱动轴104之间的差动旋转(差速器锁定)。
[0197]
反转机构106与第一驱动轴103和第二驱动轴104配置在同轴上。此外,在图10所示的例子中,反转机构106配置于电动马达108的输出轴即动力转矩输出轴108a的中空部分。反转机构106在第一驱动轴103与第二驱动轴104进行差动旋转的情况下,使该第一驱动轴103和第二驱动轴104向彼此相反的方向旋转。反转机构106由第一控制行星齿轮机构117和第二控制行星齿轮机构118构成。第一控制行星齿轮机构117和第二控制行星齿轮机构118均与第一驱动轴103和第二驱动轴104配置在同轴上。具体而言,第一驱动轴103和第二驱动轴104以及第一控制行星齿轮机构117和第二控制行星齿轮机构118均配置在同一旋转轴线al上。第一控制行星齿轮机构117将致动器105所输出的控制转矩传递至差动机构102的第一差动反作用力元件113。第二控制行星齿轮机构118将致动器105所输出的控制转矩传递至差动机构102的第二差动反作用力元件115。
[0198]
第一控制行星齿轮机构117具有控制输入元件119、第一控制输出元件120、第一行星齿轮121以及第一齿轮122。控制输入元件119从致动器105被输入控制转矩。第一控制输出元件120向差动机构102的第一差动反作用力元件113和第一驱动轴103输出控制转矩。第一行星齿轮121从控制输入元件119被传递控制转矩。第一齿轮122与第一行星齿轮121啮合,形成控制输入元件119或第一控制输出元件120。另一方面,第二控制行星齿轮机构118具有控制输入元件119、第二控制输出元件123、第二行星齿轮124以及第二齿轮125。控制输入元件119与上述的第一控制行星齿轮机构117兼用。第二控制输出元件123向差动机构102的第二差动反作用力元件115和第二驱动轴104输出控制转矩。第二行星齿轮124从控制输入元件119被传递控制转矩。第二齿轮125与第二行星齿轮124啮合,形成控制输入元件119或第二控制输出元件123。
[0199]
反转机构106具有:第一行星齿轮121、第二行星齿轮124、第三行星齿轮126以及第四行星齿轮127这四组行星齿轮;第一太阳轮128、第二太阳轮129、第三太阳轮130以及第四太阳轮131这四个太阳轮;以及轮架132。
[0200]
第一行星齿轮121、第二行星齿轮124、第三行星齿轮126以及第四行星齿轮127分别在同轴上串联地配置。第一行星齿轮121、第二行星齿轮124、第三行星齿轮126以及第四
行星齿轮127分别由轮架132保持为能自转且能公转。第一行星齿轮121与第三行星齿轮126在自转方向上一体地旋转。第二行星齿轮124与第四行星齿轮127在自转方向上一体地旋转。第一行星齿轮121和第三行星齿轮126与第二行星齿轮124和第四行星齿轮127彼此相对旋转。
[0201]
第一太阳轮128、第二太阳轮129、第三太阳轮130以及第四太阳轮131分别在同轴上串联地配置。第一太阳轮128、第二太阳轮129、第三太阳轮130以及第四太阳轮131分别与第一行星齿轮121、第二行星齿轮124、第三行星齿轮126以及第四行星齿轮127啮合。第一太阳轮128与差动机构102的第一差动反作用力元件113(即第二太阳轮109b)连结。第二太阳轮129与差动机构102的第二差动反作用力元件115(即第二太阳轮110b)连结。第三太阳轮130与第四太阳轮131连结。第一太阳轮128与第二太阳轮129与第三太阳轮130和第四太阳轮131彼此相对旋转。
[0202]
轮架132连结于致动器105的控制转矩输出轴105a。第一太阳轮128连结于差动机构102的第二太阳轮109b。即,第一太阳轮128经由第二太阳轮109b和第一动力行星齿轮机构109连结于第一驱动轴103。第一太阳轮128与第一行星齿轮121彼此啮合。此外,第二太阳轮129连结于差动机构102的第二太阳轮110b。即,第二太阳轮129经由第二太阳轮110b和第二动力行星齿轮机构110连结于第二驱动轴104。第二太阳轮129与第二行星齿轮124彼此啮合。
[0203]
因此,轮架132成为控制输入元件119,第一太阳轮128成为第一控制输出元件120并且成为第一齿轮122,从而构成第一控制行星齿轮机构117。此外,轮架132成为控制输入元件119,第二太阳轮129成为第二控制输出元件123并且成为第二齿轮125,从而构成第二控制行星齿轮机构118。
[0204]
在图10所示的例子中,包括第一行星齿轮121和第一齿轮122(即第一太阳轮128)的第一齿轮系133的齿轮传动比与包括第二行星齿轮124和第二齿轮125(即第二太阳轮129)的第二齿轮系134的齿轮传动比彼此不同。具体而言,第一齿轮系133中的第一行星齿轮121和第一太阳轮128的齿轮副的齿轮传动比与第二齿轮系134中的第二行星齿轮124和第二太阳轮129的齿轮副的齿轮传动比彼此不同。
[0205]
更具体而言,第一太阳轮128的齿数与第二太阳轮129的齿数与第三太阳轮130的齿数与第四太阳轮131的齿数均相等。第一行星齿轮121的齿数、第二行星齿轮124的齿数、第三行星齿轮126的齿数以及第四行星齿轮127的齿数均少于各太阳轮128、129、130、131的齿数。此外,第三行星齿轮126的齿数与第四行星齿轮127的齿数相等。并且,第一行星齿轮121的齿数多于第三行星齿轮126和第四行星齿轮127的齿数,并且第二行星齿轮124的齿数少于第三行星齿轮126和第四行星齿轮127的齿数。例如,如图10中括号内的数值所示,各太阳轮128、129、130、131的齿数为“34”,第一行星齿轮121的齿数为“19”,第二行星齿轮124的齿数为“17”,第三行星齿轮126和第四行星齿轮127的齿数为“18”。
[0206]
在该情况下,当将第一行星齿轮121的齿数设为z
p1
、将第一太阳轮128的齿数设为z
s1
时,第一齿轮系133的齿轮传动比u1成为:
[0207]
u1=z
p1
/z
s1
。
[0208]
因此,例如,如上述的例子那样,在第一行星齿轮121的齿数z
p1
为“19”、第一太阳轮128的齿数z
s1
为“34”的情况下,第一齿轮系133的齿轮传动比u1成为:
[0209]
u1≈0.56。
[0210]
同样地,当将第二行星齿轮124的齿数设为z
p2
、将第二太阳轮129的齿数设为z
s2
时,第二齿轮系134的齿轮传动比u2成为:
[0211]
u2=z
p2
/z
s2
。
[0212]
因此,例如,如上述的例子那样,在第二行星齿轮124的齿数z
p2
为“17”、第二太阳轮129的齿数z
s2
为“34”的情况下,第二齿轮系134的齿轮传动比u2成为:
[0213]
u2=0.50。
[0214]
使第一行星齿轮121的齿数z
p1
与第二行星齿轮124的齿数z
p2
彼此不同,由此第一齿轮系133的齿轮传动比u1与第二齿轮系134的齿轮传动比u2彼此不同。
[0215]
如上所述,第一控制行星齿轮机构117中的第一齿轮系133的齿轮传动比u1与第二控制行星齿轮机构118中的第二齿轮系134的齿轮传动比u2彼此不同,由此,在第一驱动轴103的转速与第二驱动轴104的转速相等的状态下,在第一控制行星齿轮机构117和第二控制行星齿轮机构118分别传递转矩时,该第一控制行星齿轮机构117中的第一齿轮系133与第二控制行星齿轮机构118中的第二齿轮系134彼此干扰。在图10所示的例子中,第一齿轮系133中的第一行星齿轮121的齿数z
p1
(19)比包括第三太阳轮130和第三行星齿轮126的齿轮系中的第三行星齿轮126的齿数z
p3
(18)多一齿,由此第一齿轮系133中的第一太阳轮128欲比第三太阳轮130快一齿地旋转。另一方面,第二齿轮系134中的第二行星齿轮124的齿数z
p2
(17)比第四太阳轮131和第四行星齿轮127的齿轮系中的第四行星齿轮127的齿数z
p4
(18)少一齿,由此第二齿轮系134中的第二太阳轮129欲比第四太阳轮131慢一齿地旋转。因此,第一太阳轮128与第二太阳轮129欲相对地向彼此相反的方向旋转。在该情况下,跟第一太阳轮128啮合的第一行星齿轮121与第三行星齿轮126一体地旋转。另一方面,跟第二太阳轮129啮合的第二行星齿轮124与第四行星齿轮127一体地旋转。跟第三行星齿轮126啮合的第三太阳轮130与跟第四行星齿轮127啮合的第四太阳轮131一体地旋转。因此,第一行星齿轮121与第二行星齿轮124一体地自转且能公转,在自转方向和公转方向上均不相对旋转。因此,彼此相反方向的转矩作用于第一齿轮系133的啮合部和第二齿轮系134的啮合部,从而第一齿轮系133与第二齿轮系134彼此干扰。其结果是,反转机构106实质上成为卡合状态,成为一体地旋转。因此,第一驱动轴103和第二驱动轴104成为一体地旋转,而不会进行差动旋转。
[0216]
相对于此,在第一驱动轴103的转速与第二驱动轴104的转速之间存在转速差的状态下,因如上所述的第一齿轮系133与第二齿轮系134之间的齿轮的干扰而产生的反转机构106的实质上的卡合状态被解除,第一控制行星齿轮机构117和第二控制行星齿轮机构118分别根据第一齿轮系133的齿轮传动比u1和第二齿轮系134的齿轮传动比u2来传递转矩。在图10所示的例子中,第一齿轮系133与第二齿轮系134进行差动旋转,由此反转机构106的实质上的卡合状态被解除。在该情况下,如上所述,彼此相反方向的转矩作用于第一齿轮系133的啮合部和第二齿轮系134的啮合部。因此,第一太阳轮128和第二太阳轮129向彼此相反的方向相对旋转。即,第一太阳轮128和第二太阳轮129以第二太阳轮129相对于第一太阳轮128反转的方式分别旋转。其结果是,第一驱动轴103和第二驱动轴104以一方的驱动轴103(或104)相对于另一方的驱动轴104(或103)反转的方式分别旋转。即,第一驱动轴103和第二驱动轴104进行差动旋转并且向彼此相反的方向相对旋转。
[0217]
而且,反转机构106被配置为:表示第一控制输出元件120的转速相对于控制输入元件119的转速的比例的第一减速比和表示第二控制输出元件123的转速相对于控制输入元件119的转速的比例的第二减速比均大于“1”。在图10所示的例子中,被配置为轮架132与第一太阳轮128之间的第一减速比和轮架132与第二太阳轮129之间的第二减速比均大于“1”。因此,第一控制行星齿轮机构117和第二控制行星齿轮机构118分别形成使第一太阳轮128和第二太阳轮129的输出转速相对于轮架132的输入转速进行减速的减速齿轮机构。因此,第一控制行星齿轮机构117和第二控制行星齿轮机构118将输入至轮架132的致动器105的控制转矩放大并向第一驱动轴103侧和第二驱动轴104侧传递。
[0218]
例如,如上述的例子那样,在第一行星齿轮121的齿数z
p1
为“19”、第一太阳轮128的齿数z
s1
为“34”、第二行星齿轮124的齿数z
p2
为“17”、第二太阳轮129的齿数z
s2
为“34”、第三行星齿轮126的齿数z
p3
为“18”、第三太阳轮130的齿数z
s3
为“34”、第四行星齿轮127的齿数z
p4
为“18”、第四太阳轮131的齿数z
s4
为“34”的情况下,第一控制行星齿轮机构117的第一减速比r1和第二控制行星齿轮机构118的第二减速比r2分别成为:
[0219]
r1=1/{1-(z
s3
/z
p3
)
×
(z
p1
/z
s1
)}≈18;
[0220]
r2=1/{1-(z
s4
/z
p4
)
×
(z
p2
/z
s2
)}≈-18。
[0221]
与以往的通过一般的行星齿轮机构所能实现的减速比大致为4至10左右的情况相比,得到了相对大的减速比。
[0222]
需要说明的是,在第一控制行星齿轮机构117中,差动机构102的第一差动反作用力元件113(即第二太阳轮109b)的旋转方向与差动机构102的第一动力输出元件112(即第一太阳轮109a)的旋转方向成为相同的旋转方向,在该第一差动反作用力元件113与第一动力输出元件112之间传递控制转矩。另一方面,在第二控制行星齿轮机构118中,相对于差动机构102的第二差动反作用力元件115(即第二太阳轮110b)的旋转方向,差动机构102的第二动力输出元件114(即第一太阳轮110a)的旋转方向被反转,在该第二差动反作用力元件115与第二动力输出元件114之间传递控制转矩。因此,如果将第一控制行星齿轮机构117中的第一动力输出元件112的旋转方向设为正旋转方向,则第二控制行星齿轮机构118中的第二动力输出元件114的旋转方向成为负旋转方向或逆旋转方向。因此,在本发明的实施方式的说明中,为了方便,对第二控制行星齿轮机构118的第二减速比r2标注了负(-)的符号。在图10所示的例子中,将反转机构106中的致动器105与第一驱动轴103和第二驱动轴104之间的减速比r表示为“r=
±
18”。
[0223]
如此,在本发明的实施方式的转矩矢量分配装置tv中,反转机构106中的第一控制行星齿轮机构117和第二控制行星齿轮机构118均形成减速比大于“1”的减速齿轮机构。即,反转机构106除了具备在第一驱动轴103与第二驱动轴104进行差动旋转时使该第一驱动轴103和第二驱动轴104向彼此相反的旋转方向相对旋转的反转功能之外,还具备将致动器105的控制转矩放大的减速功能(转矩放大功能)。在上述的图10所示的例子中,具有减速比成为“18”的大的转矩放大功能。因此,根据本发明的实施方式的转矩矢量分配装置tv,能与通过反转机构106的减速功能来放大控制转矩相应地谋求致动器105的小型化。因此,能使转矩矢量分配装置tv小型化。
[0224]
此外,对于本发明的实施方式的转矩矢量分配装置tv而言,反转机构106成为单轴构造。因此,能容易地构成兼具如上所述的反转功能和减速功能的反转机构106而不必使用
复杂的构造。此外,通过将反转机构106与第一驱动轴103和第二驱动轴104配置在同轴上,能抑制转矩矢量分配装置tv向径向的大型化。而且,能通过反转机构106的减速功能来使致动器105小型化。因此,根据本发明的实施方式的转矩矢量分配装置tv,能容易地谋求反转机构106和致动器105的小型化,进而,能使转矩矢量分配装置tv的外形小型化。其结果是,能容易地将小型化后的转矩矢量分配装置tv搭载于车辆。
[0225]
此外,在本发明的实施方式的转矩矢量分配装置tv中,动力源即电动马达108的动力转矩输出轴108a形成为中空形状,此外,致动器105的控制转矩输出轴105a形成为中空形状。并且,在该动力转矩输出轴108a的中空部分和控制转矩输出轴105a的中空部分配置差动机构102和反转机构106。因此,在如上所述反转机构106成为单轴构造的同时,能抑制转矩矢量分配装置tv向径向的大型化,使转矩矢量分配装置tv的外形小型化。而且,如图10所示,能构成圆筒状的简单外观的转矩矢量分配装置tv。其结果是,能容易地将小型化且简化后的转矩矢量分配装置tv搭载于车辆。
[0226]
需要说明的是,上述的第一行星齿轮121、第二行星齿轮124、第三行星齿轮126和第四行星齿轮127、以及第一太阳轮128、第二太阳轮129、第三太阳轮130和第四太阳轮131的排列顺序并不限定于图10所示的顺序。例如,也可以是将第一行星齿轮121和第三行星齿轮126以及第一太阳轮128和第三太阳轮130与第二行星齿轮124和第四行星齿轮127以及第二太阳轮129和第四太阳轮131交换配置而成的构成。
[0227]
〔第十一实施例〕
[0228]
在图11所示的转矩矢量分配装置tv中,差动机构102由第一动力行星齿轮机构141和第二动力行星齿轮机构142构成。第一动力行星齿轮机构141和第二动力行星齿轮机构142分别在同轴上左右对置地配置。具体而言,第一驱动轴103和第二驱动轴104以及第一动力行星齿轮机构141和第二动力行星齿轮机构142配置在同一旋转轴线al上。
[0229]
第一动力行星齿轮机构141和第二动力行星齿轮机构142分别由单小齿轮型的行星齿轮机构构成。
[0230]
第一动力行星齿轮机构141具有太阳轮141a、齿圈141b、轮架141c。太阳轮141a连结于后述的反转机构106的第一太阳轮149。太阳轮141a与第一太阳轮149一体地旋转。齿圈141b连结于动力源的输出轴、即电动马达108的动力转矩输出轴108a。换言之,在动力转矩输出轴108a的中空部分的内周部形成有内齿齿轮的齿圈141b。轮架141c经由后述的第一输出转矩减速机构143连结于第一驱动轴103。第一动力行星齿轮机构141配置于动力转矩输出轴108a的中空部分。
[0231]
第一输出转矩减速机构143由单行星型的行星齿轮机构构成。第一输出转矩减速机构143在轮架141c与第一驱动轴103之间将动力源所输出的动力转矩放大并传递至第一驱动轴103。
[0232]
第二动力行星齿轮机构142具有太阳轮142a、齿圈142b、轮架142c。太阳轮142a连结于后述的反转机构106的第二太阳轮150。太阳轮142a与第二太阳轮150一体地旋转。齿圈142b经由连结机构144连结于电动马达108的动力转矩输出轴108a。连结机构144由连结轴144a以及设于连结轴144a的两端的齿轮副144b和齿轮副144c构成。连结机构144在动力转矩输出轴108a与齿圈142b之间对动力源所输出的动力转矩进行传递。轮架142c经由后述的第二输出转矩减速机构145连结于第二驱动轴104。第二动力行星齿轮机构142配置于控制
转矩输出轴105a的中空部分。
[0233]
第二输出转矩减速机构145由单行星型的行星齿轮机构构成。第二输出转矩减速机构145在轮架142c与第二驱动轴104之间将动力源所输出的动力转矩放大并传递至第二驱动轴104。
[0234]
第一动力行星齿轮机构141的齿圈141b连结于电动马达108的动力转矩输出轴108a。动力源所产生的动力转矩经由输入构件101即动力转矩输出轴108a被传递至齿圈141b。与此同时,动力源所产生的动力转矩经由动力转矩输出轴108a和连结机构144被传递至齿圈142b。因此,齿圈141b和齿圈142b成为差动机构102的动力输入元件111。
[0235]
第一动力行星齿轮机构141的轮架141c经由第一输出转矩减速机构143连结于第一驱动轴103。传递至差动机构102的动力转矩的一部分从轮架141c传递至第一输出转矩减速机构143,被第一输出转矩减速机构143放大并输出至第一驱动轴103。因此,轮架141c成为差动机构102的第一动力输出元件112。
[0236]
第一动力行星齿轮机构141的太阳轮141a连结于后述的反转机构106的第一太阳轮149。从致动器105传递至反转机构106的第一太阳轮149的控制转矩的一部分作为对从动力输入元件111传递至第一动力输出元件112的动力转矩的反作用力发挥作用。因此,太阳轮141a成为差动机构102的第一差动反作用力元件113。
[0237]
第二动力行星齿轮机构142的轮架142c经由第二输出转矩减速机构145连结于第二驱动轴104。传递至差动机构102的动力转矩的一部分从轮架142c传递至第二输出转矩减速机构145,被第二输出转矩减速机构145放大并输出至第二驱动轴104。因此,轮架142c成为差动机构102的第二动力输出元件114。
[0238]
第二动力行星齿轮机构142的太阳轮142a连结于后述的反转机构106的第二太阳轮150。从致动器105传递至反转机构106的第二太阳轮150的控制转矩的一部分作为对从动力输入元件111传递至第二动力输出元件114的动力转矩的反作用力发挥作用。因此,太阳轮142a成为差动机构102的第二差动反作用力元件115。
[0239]
反转机构106具有:第一行星齿轮146、第二行星齿轮147以及第三行星齿轮148这三组行星齿轮;第一太阳轮149、第二太阳轮150以及第三太阳轮151这三个太阳轮;以及轮架152。反转机构106配置于动力转矩输出轴108a的中空部分。
[0240]
第一行星齿轮146、第二行星齿轮147以及第三行星齿轮148在同轴上串联地配置。第一行星齿轮146与第二行星齿轮147与第三行星齿轮148在自转方向上一体地旋转。
[0241]
第一太阳轮149、第二太阳轮150以及第三太阳轮151在同轴上串联地配置。第一太阳轮149与第二太阳轮150与第三太阳轮151彼此相对旋转。第一太阳轮149、第二太阳轮150以及第三太阳轮151分别与第一行星齿轮146、第二行星齿轮147以及第三行星齿轮148啮合。
[0242]
轮架152将各行星齿轮146、147、148分别保持为能自转且能公转。
[0243]
轮架152连结于致动器105的控制转矩输出轴105a。第一太阳轮149连结于太阳轮141a、即差动机构102的第一差动反作用力元件113。第一太阳轮149与第一行星齿轮146彼此啮合。此外,第二太阳轮150连结于太阳轮142a、即差动机构102的第二差动反作用力元件115。第二太阳轮150与第二行星齿轮147彼此啮合。
[0244]
因此,轮架152成为控制输入元件119,第一太阳轮149成为第一控制输出元件120
并且成为第一齿轮122,从而构成第一控制行星齿轮机构117。此外,轮架152成为控制输入元件119,第二太阳轮150成为第二控制输出元件123并且成为第二齿轮125,从而构成第二控制行星齿轮机构118。
[0245]
在图11所示的例子中,包括第一行星齿轮146和第一齿轮122(即第一太阳轮149)的第一齿轮系153的齿轮传动比与包括第二行星齿轮147和第二齿轮125(即第二太阳轮150)的第二齿轮系154的齿轮传动比彼此不同。具体而言,第一齿轮系153中的第一行星齿轮146和第一太阳轮149的齿轮副的齿轮传动比与第二齿轮系154中的第二行星齿轮147和第二太阳轮150的齿轮副的齿轮传动比彼此不同。
[0246]
更具体而言,第一太阳轮149的齿数与第二太阳轮150的齿数与第三太阳轮151的齿数均相等。第一行星齿轮146的齿数多于第三行星齿轮148的齿数,并且第二行星齿轮147的齿数少于第三行星齿轮148的齿数。
[0247]
例如,在图11所示的例子中,各太阳轮149、150、151的齿数为“24”,第一行星齿轮146的齿数为“36”,第二行星齿轮147的齿数为“18”,第三行星齿轮148的齿数为“24”。在该情况下,减速比r成为“r=
±
3”。在该图11所示的转矩矢量分配装置tv中,例如与上述的图10中示出的例子相比,所得到的减速比相对小。但是,在该图11所示的例子中,施加于反转机构106的负荷变小,因此,与之相应地,能使反转机构106小型化。因此,能使转矩矢量分配装置tv的外形小型化。
[0248]
需要说明的是,上述的第一行星齿轮146、第二行星齿轮147和第三行星齿轮148、以及第一太阳轮149、第二太阳轮150和第三太阳轮151的排列顺序并不限定于图11所示的顺序。例如,也可以是将第一行星齿轮146和第一太阳轮149与第二行星齿轮147和第二太阳轮150交换配置而成的构成。
[0249]
〔第十二实施例〕
[0250]
在图12所示的转矩矢量分配装置tv中,差动机构102由第一动力行星齿轮机构161和第二动力行星齿轮机构162构成。第一动力行星齿轮机构161和第二动力行星齿轮机构162分别在同轴上左右对置地配置。具体而言,第一驱动轴103和第二驱动轴104以及第一动力行星齿轮机构161和第二动力行星齿轮机构162配置在同一旋转轴线al上。
[0251]
第一动力行星齿轮机构161和第二动力行星齿轮机构162分别由单小齿轮型的行星齿轮机构构成。
[0252]
第一动力行星齿轮机构161具有太阳轮161a、齿圈161b、轮架161c。太阳轮161a连结于后述的反转机构106的第一太阳轮172。太阳轮161a与第一太阳轮172一体地旋转。齿圈161b在外周部分形成有外齿齿轮的输入齿轮161d。输入齿轮161d与反转齿轮163啮合。反转齿轮163旋转自如地支承于反转齿轮轴163a。反转齿轮轴163a的两端固定于壳体107。此外,反转齿轮163和输入齿轮161d一起与设于后述的第一动力转矩输出轴108b的第一小齿轮164啮合。因此,齿圈161b经由包括输入齿轮161d、反转齿轮163以及第一小齿轮164的齿轮系165连结于第一动力转矩输出轴108b。轮架161c连结于第一驱动轴103。
[0253]
第二动力行星齿轮机构162具有太阳轮162a、齿圈162b、轮架162c。太阳轮162a连结于后述的反转机构106的第二太阳轮173。太阳轮162a与第二太阳轮173一体地旋转。齿圈162b在外周部分形成有外齿齿轮的输入齿轮162d。输入齿轮162d与反转齿轮166啮合。反转齿轮166旋转自如地支承于反转齿轮轴166a。反转齿轮轴166a的两端固定于壳体107。此外,
反转齿轮166和输入齿轮162d一起与设于后述的第二动力转矩输出轴108c的第二小齿轮167啮合。因此,齿圈162b经由包括输入齿轮162d、反转齿轮166以及第二小齿轮167的齿轮系168连结于第二动力转矩输出轴108c。轮架162c连结于第二驱动轴104。
[0254]
在图12所示的例子中,动力源即电动马达108具有第一动力转矩输出轴108b和第二动力转矩输出轴108c来作为动力转矩输出轴108a。第一动力转矩输出轴108b和第二动力转矩输出轴108c在同轴上左右对置地配置。第一动力转矩输出轴108b向第一驱动轴103侧(图12的左侧)突出。在第一动力转矩输出轴108b的突出部分装配有第一小齿轮164。第二动力转矩输出轴108c向第二驱动轴104侧(图12的右侧)突出。在第二动力转矩输出轴108c的突出部分装配有第二小齿轮167。
[0255]
第一动力行星齿轮机构161的齿圈161b经由齿轮系165连结于电动马达108的第一动力转矩输出轴108b。动力源所产生的动力转矩经由输入构件101即第一动力转矩输出轴108b和齿轮系165被传递至齿圈161b。此外,第二动力行星齿轮机构162的齿圈162b经由齿轮系168连结于电动马达108的第二动力转矩输出轴108c。动力源所产生的动力转矩经由输入构件101即第二动力转矩输出轴108c和齿轮系168被传递至齿圈162b。因此,齿圈161b和齿圈162b成为差动机构102的动力输入元件111。
[0256]
第一动力行星齿轮机构161的轮架161c连结于第一驱动轴103。传递至差动机构102的动力转矩的一部分从轮架161c被输出至第一驱动轴103。因此,轮架161c成为差动机构102的第一动力输出元件112。
[0257]
第一动力行星齿轮机构161的太阳轮161a连结于后述的反转机构106的第一太阳轮172。从致动器105传递至反转机构106的第一太阳轮172的控制转矩的一部分作为对从动力输入元件111传递至第一动力输出元件112的动力转矩的反作用力发挥作用。因此,太阳轮161a成为差动机构102的第一差动反作用力元件113。
[0258]
第二动力行星齿轮机构162的轮架162c连结于第二驱动轴104。传递至差动机构102的动力转矩的一部分从轮架162c被输出至第二驱动轴104。因此,轮架162c成为差动机构102的第二动力输出元件114。
[0259]
第二动力行星齿轮机构162的太阳轮162a连结于后述的反转机构106的第二太阳轮173。从致动器105传递至反转机构106的第二太阳轮173的控制转矩的一部分作为对从动力输入元件111传递至第二动力输出元件114的动力转矩的反作用力发挥作用。因此,太阳轮162a成为差动机构102的第二差动反作用力元件115。
[0260]
反转机构106具有:第一行星齿轮169、第二行星齿轮170以及第三行星齿轮171这三组行星齿轮;第一太阳轮172、第二太阳轮173以及第三太阳轮174这三个太阳轮;以及轮架175。
[0261]
第一行星齿轮169、第二行星齿轮170以及第三行星齿轮171在同轴上串联地配置。第一行星齿轮169与第二行星齿轮170与第三行星齿轮171在自转方向上一体地旋转。
[0262]
第一太阳轮172、第二太阳轮173以及第三太阳轮174在同轴上串联地配置。第一太阳轮172与第二太阳轮173与第三太阳轮174彼此相对旋转。第一太阳轮172、第二太阳轮173以及第三太阳轮174分别与第一行星齿轮169、第二行星齿轮170以及第三行星齿轮171啮合。
[0263]
轮架175将各行星齿轮169、170、171分别保持为能自转且能公转。反转机构106和
致动器105一起与第一驱动轴103和第二驱动轴104以及第一动力行星齿轮机构161和第二动力行星齿轮机构162配置在同一旋转轴线al上。此外,反转机构106和致动器105在旋转轴线al上配置于第一动力行星齿轮机构161与第二动力行星齿轮机构162之间。
[0264]
轮架175连结于致动器105的控制转矩输出轴105a。第一太阳轮172连结于太阳轮161a、即差动机构102的第一差动反作用力元件113。第一太阳轮172与第一行星齿轮169彼此啮合。此外,第二太阳轮173连结于太阳轮162a、即差动机构102的第二差动反作用力元件115。第二太阳轮173与第二行星齿轮170彼此啮合。
[0265]
因此,轮架175成为控制输入元件119,第一太阳轮172成为第一控制输出元件120并且成为第一齿轮122,从而构成第一控制行星齿轮机构117。此外,轮架175成为控制输入元件119,第二太阳轮173成为第二控制输出元件123并且成为第二齿轮125,从而构成第二控制行星齿轮机构118。
[0266]
在图12所示的例子中,包括第一行星齿轮169和第一齿轮122(即第一太阳轮172)的第一齿轮系176的齿轮传动比与包括第二行星齿轮170和第二齿轮125(即第二太阳轮173)的第二齿轮系177的齿轮传动比彼此不同。具体而言,第一齿轮系176中的第一行星齿轮169和第一太阳轮172的齿轮副的齿轮传动比与第二齿轮系177中的第二行星齿轮170和第二太阳轮173的齿轮副的齿轮传动比彼此不同。
[0267]
更具体而言,第一太阳轮172的齿数与第二太阳轮173的齿数与第三太阳轮174的齿数均相等。第一行星齿轮169的齿数少于第三行星齿轮171的齿数,并且第二行星齿轮170的齿数多于第三行星齿轮171的齿数。
[0268]
例如,在图12所示的例子中,各太阳轮172、173、174的齿数为“34”,第一行星齿轮169的齿数为“17”,第二行星齿轮170的齿数为“19”,第三行星齿轮171的齿数为“18”。在该情况下,减速比r成为“r=
±
18”。与以往的通过一般的行星齿轮机构所能实现的减速比大致为4至10左右的情况相比,得到了相对大的减速比。
[0269]
需要说明的是,上述的第一行星齿轮169、第二行星齿轮170和第三行星齿轮171、以及第一太阳轮172、第二太阳轮173和第三太阳轮174的排列顺序并不限定于图12所示的顺序。例如,也可以是将第一行星齿轮169和第一太阳轮172与第二行星齿轮170和第二太阳轮173交换配置而成的构成。
[0270]
〔第十三实施例〕
[0271]
在图13所示的转矩矢量分配装置tv中,与上述的图10中示出的例子相同,差动机构102由第一动力行星齿轮机构109和第二动力行星齿轮机构110构成。第一动力行星齿轮机构109和第二动力行星齿轮机构110均与第一驱动轴103和第二驱动轴104配置在同一旋转轴线al上。
[0272]
反转机构106具有:第一行星齿轮181、第二行星齿轮182、第三行星齿轮183以及第四行星齿轮184这四组行星齿轮;第一太阳轮185、第二太阳轮186、第三太阳轮187以及第四太阳轮188这四个太阳轮;第一齿圈189、第二齿圈190、第三齿圈191以及第四齿圈192这四个齿圈;以及第一轮架193、第二轮架194、第三轮架195这三个轮架。反转机构106配置于动力转矩输出轴108a的中空部分。
[0273]
第一行星齿轮181、第二行星齿轮182、第三行星齿轮183以及第四行星齿轮184在同轴上串联地配置。第一行星齿轮181与第二行星齿轮182与第三行星齿轮183与第四行星
齿轮184彼此相对旋转。
[0274]
第一太阳轮185、第二太阳轮186、第三太阳轮187以及第四太阳轮188在同轴上串联地配置。第一太阳轮185与第三太阳轮187一体地旋转。第二太阳轮186与第四太阳轮188一体地旋转。第一太阳轮185和第三太阳轮187与第二太阳轮186和第四太阳轮188彼此相对旋转。第一太阳轮185、第二太阳轮186、第三太阳轮187以及第四太阳轮188分别与第一行星齿轮181、第二行星齿轮182、第三行星齿轮183以及第四行星齿轮184啮合。
[0275]
第一齿圈189、第二齿圈190、第三齿圈191以及第四齿圈192在同轴上串联地配置。第一齿圈189与第二齿圈190与第三齿圈191与第四齿圈192均一体地旋转。第一齿圈189、第二齿圈190、第三齿圈191以及第四齿圈192分别与第一行星齿轮181、第二行星齿轮182、第三行星齿轮183以及第四行星齿轮184啮合。
[0276]
第一轮架193、第二轮架194以及第三轮架195在同轴上串联地配置。第一轮架193与第二轮架194与第三轮架195彼此相对旋转。第一轮架193将第一行星齿轮181保持为能自转且能公转。第二轮架194将第二行星齿轮182保持为能自转且能公转。第三轮架195将第三行星齿轮183和第四行星齿轮184分别保持为能自转且能公转。
[0277]
各齿圈189、190、191、192连结于致动器105的控制转矩输出轴105a。第一轮架193连结于第二太阳轮109b、即差动机构102的第一差动反作用力元件113。第一太阳轮185和第一齿圈189一起与第一行星齿轮181啮合。此外,第二轮架194连结于第二太阳轮110b、即差动机构102的第二差动反作用力元件115。第二行星齿轮182与第二太阳轮186和第一齿圈189啮合。第二太阳轮186和第二齿圈190一起与第二行星齿轮182啮合。
[0278]
因此,第一齿圈189成为控制输入元件119并且成为第一齿轮122,第一轮架193成为第一控制输出元件120,从而构成第一控制行星齿轮机构117。此外,第二齿圈190成为控制输入元件119并且成为第二齿轮125,第二轮架194成为第二控制输出元件123,从而构成第二控制行星齿轮机构118。
[0279]
在图13所示的例子中,包括第一行星齿轮181、第一齿轮122(即第一齿圈189)以及第一太阳轮185的第一齿轮系196的齿轮传动比与包括第二行星齿轮182、第二齿轮125(即第二齿圈190)以及第二太阳轮186的第二齿轮系197的齿轮传动比彼此不同。具体而言,第一齿轮系196中的第一行星齿轮181、第一齿圈189以及第一太阳轮185的齿轮副的齿轮传动比与第二齿轮系197中的第二行星齿轮182、第二齿圈190以及第二太阳轮186的齿轮副的齿轮传动比彼此不同。
[0280]
更具体而言,第一行星齿轮181的齿数与第二行星齿轮182的齿数与第三行星齿轮183的齿数与第四行星齿轮184的齿数均相等。第三太阳轮187的齿数与第四太阳轮188的齿数相等。第一太阳轮185的齿数少于第三太阳轮187和第四太阳轮188的齿数。此外,第二太阳轮186的齿数多于第三太阳轮187和第四太阳轮188的齿数。第三齿圈191的齿数与第四齿圈192的齿数相等。第一齿圈189的齿数多于第三齿圈191和第四齿圈192的齿数。此外,第二齿圈190的齿数少于第三齿圈191和第四齿圈192的齿数。
[0281]
例如,在图13所示的例子中,第一太阳轮185的齿数为“29”,第二太阳轮186的齿数为“31”,第三太阳轮187和第四太阳轮188的齿数为“30”,第一齿圈189的齿数为“67”,第二齿圈190的齿数为“65”,第三齿圈191和第四齿圈192的齿数为“66”。在该情况下,减速比r成为“r=
±
30”。与以往的通过一般的行星齿轮机构所能实现的减速比大致为4至10左右的情
况相比,得到了相对大的减速比。
[0282]
需要说明的是,上述的第一行星齿轮181、第二行星齿轮182、第三行星齿轮183和第四行星齿轮184、以及第一太阳轮185、第二太阳轮186、第三太阳轮187和第四太阳轮188、以及第一齿圈189、第二齿圈190、第三齿圈191和第四齿圈192的排列顺序并不限定于图13所示的顺序。例如,也可以是将第一行星齿轮181和第三行星齿轮183、以及第一太阳轮185和第三太阳轮187、以及第一齿圈189和第三齿圈191与第二行星齿轮182和第四行星齿轮184、以及第二太阳轮186和第四太阳轮188、以及第二齿圈190和第四齿圈192交换配置而成的构成。
[0283]
〔第十四实施例〕
[0284]
在图14所示的转矩矢量分配装置tv中,差动机构102由第一动力行星齿轮机构201和第二动力行星齿轮机构202构成。第一动力行星齿轮机构201和第二动力行星齿轮机构202分别在同轴上左右对置地配置。具体而言,第一驱动轴103和第二驱动轴104以及第一动力行星齿轮机构201和第二动力行星齿轮机构202配置在同一旋转轴线al上。
[0285]
第一动力行星齿轮机构201和第二动力行星齿轮机构202分别由将两组行星齿轮机构组合而成的复合行星齿轮机构构成。
[0286]
第一动力行星齿轮机构201具有第一齿圈201a、第二齿圈201b、轮架201c、第一行星齿轮201d以及第二行星齿轮201e。第一齿圈201a与第二齿圈201b在同轴上串联地配置。此外,第一齿圈201a与第二齿圈201b彼此相对旋转。第一行星齿轮201d与第一齿圈201a啮合。第二行星齿轮201e与第二齿圈201b啮合。轮架201c将第一行星齿轮201d和第二行星齿轮201e分别保持为能自转并且能绕旋转轴线al公转。第一行星齿轮201d与第二行星齿轮201e在自转方向上一体地旋转。第一动力行星齿轮机构201配置于动力转矩输出轴108a的中空部分。
[0287]
第二动力行星齿轮机构202具有第一齿圈202a、第二齿圈202b、轮架202c、第一行星齿轮202d以及第二行星齿轮202e。第一齿圈202a与第二齿圈202b在同轴上串联地配置。此外,第一齿圈202a与第二齿圈202b彼此相对旋转。第一行星齿轮202d与第一齿圈202a啮合。第二行星齿轮202e与第二齿圈202b啮合。轮架202c将第一行星齿轮202d和第二行星齿轮202e分别保持为能自转并且能绕旋转轴线al公转。第一行星齿轮202d与第二行星齿轮202e在自转方向上一体地旋转。上述的第一动力行星齿轮机构201的轮架201c与第二动力行星齿轮机构202的轮架202c经由连结轴203连结。轮架201c与轮架202c与连结轴203一体地旋转。第二动力行星齿轮机构202配置于动力转矩输出轴108a的中空部分和致动器105的控制转矩输出轴105a的中空部分。
[0288]
第一动力行星齿轮机构201的轮架201c连结于电动马达108的动力转矩输出轴108a。第一动力行星齿轮机构201的各齿圈201a、201b以及第二动力行星齿轮机构202的各齿圈202a、202b均与连结轴203相对旋转。动力源所产生的动力转矩经由输入构件101即动力转矩输出轴108a被传递至轮架201c。与此同时,动力源所产生的动力转矩经由动力转矩输出轴108a和连结轴203被传递至轮架202c。因此,轮架201c和轮架202c成为差动机构102的动力输入元件111。
[0289]
第一动力行星齿轮机构201的第一齿圈201a连结于第一驱动轴103。传递至差动机构102的动力转矩的一部分从第一齿圈201a被输出至第一驱动轴103。因此,第一齿圈201a
成为差动机构102的第一动力输出元件112。
[0290]
第一动力行星齿轮机构201的第二齿圈201b连结于反转机构106的第一轮架193。从致动器105传递至反转机构106的第一轮架193的控制转矩的一部分作为对从动力输入元件111传递至第一动力输出元件112的动力转矩的反作用力发挥作用。因此,第二齿圈201b成为差动机构102的第一差动反作用力元件113。
[0291]
第二动力行星齿轮机构202的第一齿圈202a连结于第二驱动轴104。传递至差动机构102的动力转矩的一部分从第一齿圈202a被输出至第二驱动轴104。因此,第一齿圈202a成为差动机构102的第二动力输出元件114。
[0292]
第二动力行星齿轮机构202的第二齿圈202b连结于反转机构106的第二轮架194。从致动器105传递至反转机构106的第二轮架194的控制转矩的一部分作为对从动力输入元件111传递至第二动力输出元件114的动力转矩的反作用力发挥作用。因此,第二齿圈202b成为差动机构102的第二差动反作用力元件115。
[0293]
反转机构106是与上述的图13中示出的例子相同的构成。即,第一齿圈189成为控制输入元件119并且成为第一齿轮122,第一轮架193成为第一控制输出元件120,从而构成第一控制行星齿轮机构117。此外,第二齿圈190成为控制输入元件119并且成为第二齿轮125,第二轮架194成为第二控制输出元件123,从而构成第二控制行星齿轮机构118。反转机构106配置于动力转矩输出轴108a的中空部分。
[0294]
在图14所示的例子中,反转机构106的第一轮架193(第一控制输出元件120)连结于差动机构102的第二齿圈201b(第一差动反作用力元件113)。此外,反转机构106的第二轮架194(第二控制输出元件123)连结于差动机构102的第二齿圈202b(第二差动反作用力元件115)。因此,在该图14所示的转矩矢量分配装置tv中,差动机构102不使用太阳轮来构成。因此,不需要供与各行星齿轮201d、201e、202d、202e对应的太阳轮配置的空间,与之相应地,能使径向的外形小型化。
[0295]
〔第十五实施例〕
[0296]
在图15所示的转矩矢量分配装置tv中,与上述的图14中示出的例子相同,差动机构102由第一动力行星齿轮机构201和第二动力行星齿轮机构202构成。第一动力行星齿轮机构201和第二动力行星齿轮机构202均与第一驱动轴103和第二驱动轴104配置在同一旋转轴线al上。
[0297]
反转机构106具有:第一行星齿轮211、第二行星齿轮212、第三行星齿轮213以及第四行星齿轮214这四组行星齿轮;第一太阳轮215、第二太阳轮216、第三太阳轮217以及第四太阳轮218这四个太阳轮;第一齿圈219、第二齿圈220、第三齿圈221以及第四齿圈222这四个齿圈;以及第一轮架223、第二轮架224以及第三轮架225这三个轮架。反转机构106配置于动力转矩输出轴108a的中空部分。
[0298]
第一行星齿轮211、第二行星齿轮212、第三行星齿轮213以及第四行星齿轮214在同轴上串联地配置。第一行星齿轮211与第二行星齿轮212与第三行星齿轮213与第四行星齿轮214彼此相对旋转。
[0299]
第一太阳轮215、第二太阳轮216、第三太阳轮217以及第四太阳轮218在同轴上串联地配置。第一太阳轮215与第二太阳轮216与第三太阳轮217与第四太阳轮218均一体地旋转。第一太阳轮215、第二太阳轮216、第三太阳轮217以及第四太阳轮218分别与第一行星齿
轮211、第二行星齿轮212、第三行星齿轮213以及第四行星齿轮214啮合。
[0300]
第一齿圈219、第二齿圈220、第三齿圈221以及第四齿圈222在同轴上串联地配置。第一齿圈219与第二齿圈220与第三齿圈221与第四齿圈222均一体地旋转。第一齿圈219、第二齿圈220、第三齿圈221以及第四齿圈222分别与第一行星齿轮211、第二行星齿轮212、第三行星齿轮213以及第四行星齿轮214啮合。
[0301]
第一轮架223、第二轮架224以及第三轮架225在同轴上串联地配置。第一轮架223与第二轮架224与第三轮架225彼此相对旋转。第一轮架223将第一行星齿轮211保持为能自转且能公转。第二轮架224将第二行星齿轮212保持为能自转且能公转。第三轮架225将第三行星齿轮213和第四行星齿轮214分别保持为能自转且能公转。
[0302]
各齿圈219、220、221、222连结于致动器105的控制转矩输出轴105a。第一轮架223连结于第二太阳轮109b、即差动机构102的第一差动反作用力元件113。第一太阳轮215和第一齿圈219一起与第一行星齿轮211啮合。此外,第二轮架224连结于第二太阳轮110b、即差动机构102的第二差动反作用力元件115。第二太阳轮216和第二齿圈220一起与第二行星齿轮212啮合。
[0303]
因此,第一齿圈219成为控制输入元件119并且成为第一齿轮122,第一轮架223成为第一控制输出元件120,从而构成第一控制行星齿轮机构117。此外,第二齿圈220成为控制输入元件119并且成为第二齿轮125,第二轮架224成为第二控制输出元件123,从而构成第二控制行星齿轮机构118。
[0304]
在图15所示的例子中,包括第一行星齿轮211、第一齿轮122(即第一齿圈219)以及第一太阳轮215的第一齿轮系226的齿轮传动比与包括第二行星齿轮212、第二齿轮125(即第二齿圈220)以及第二太阳轮216的第二齿轮系227的齿轮传动比彼此不同。具体而言,第一齿轮系226中的第一行星齿轮211、第一齿圈219以及第一太阳轮215的齿轮副的齿轮传动比与第二齿轮系227中的第二行星齿轮212、第二齿圈220以及第二太阳轮216的齿轮副的齿轮传动比彼此不同。
[0305]
更具体而言,第一行星齿轮211的齿数与第二行星齿轮212的齿数与第三行星齿轮213的齿数与第四行星齿轮214的齿数均相等。第三太阳轮217的齿数与第四太阳轮218的齿数相等。第一太阳轮215的齿数少于第三太阳轮217和第四太阳轮218的齿数。此外,第二太阳轮216的齿数多于第三太阳轮217和第四太阳轮218的齿数。第三齿圈221的齿数与第四齿圈222的齿数相等。第一齿圈219的齿数多于第三齿圈221和第四齿圈222的齿数。此外,第二齿圈220的齿数少于第三齿圈221和第四齿圈222的齿数。
[0306]
例如,在图15所示的例子中,第一太阳轮215的齿数为“29”,第二太阳轮216的齿数为“31”,第三太阳轮217和第四太阳轮218的齿数为“30”,第一齿圈219的齿数为“67”,第二齿圈220的齿数为“65”,第三齿圈221和第四齿圈222的齿数为“66”。在该情况下,减速比r成为“r=
±
30”。与以往的通过一般的行星齿轮机构所能实现的减速比大致为4至10左右的情况相比,得到了相对大的减速比。
[0307]
此外,在图15所示的例子中,反转机构106的第一轮架223(第一控制输出元件120)连结于差动机构102的第二齿圈201b(第一差动反作用力元件113)。此外,反转机构106的第二轮架224(第二控制输出元件123)连结于差动机构102的第二齿圈202b(第二差动反作用力元件115)。因此,在该图15所示的转矩矢量分配装置tv中,差动机构102不使用太阳轮来
构成。因此,不需要供与各行星齿轮201d、201e、202d、202e对应的太阳轮配置的空间,与之相应地,能使径向的外形小型化。
[0308]
需要说明的是,上述的第一行星齿轮211、第二行星齿轮212、第三行星齿轮213和第四行星齿轮214、以及第一太阳轮215、第二太阳轮216、第三太阳轮217和第四太阳轮218、以及第一齿圈219、第二齿圈220、第三齿圈221和第四齿圈222、以及第一轮架223、第二轮架224和第三轮架225的排列顺序并不限定于图15所示的顺序。例如,也可以是将第一行星齿轮211、第一太阳轮215、第一齿圈219以及第一轮架223与第二行星齿轮212、第二太阳轮216、第二齿圈220以及第二轮架224交换配置而成的构成。
[0309]
〔第十六实施例〕
[0310]
在图16所示的转矩矢量分配装置tv中,与上述的图14、图15中示出的例子相同,差动机构102由第一动力行星齿轮机构201和第二动力行星齿轮机构202构成。第一动力行星齿轮机构201和第二动力行星齿轮机构202均与第一驱动轴103和第二驱动轴104配置在同一旋转轴线al上。
[0311]
反转机构106具有:第一行星齿轮231、第二行星齿轮232以及第三行星齿轮233这三组行星齿轮;第一太阳轮234、第二太阳轮235以及第三太阳轮236这三个太阳轮;第一齿圈237、第二齿圈238以及第三齿圈239这三个齿圈;以及第一轮架240、第二轮架241以及第三轮架242这三个轮架。反转机构106配置于动力转矩输出轴108a的中空部分。
[0312]
第一行星齿轮231、第二行星齿轮232以及第三行星齿轮233在同轴上串联地配置。第一行星齿轮231与第二行星齿轮232与第三行星齿轮233彼此相对旋转。
[0313]
第一太阳轮234、第二太阳轮235以及第三太阳轮236在同轴上串联地配置。第一太阳轮234与第二太阳轮235与第三太阳轮236均一体地旋转。第一太阳轮234、第二太阳轮235以及第三太阳轮236分别与第一行星齿轮231、第二行星齿轮232以及第三行星齿轮233啮合。
[0314]
第一齿圈237、第二齿圈238以及第三齿圈239在同轴上串联地配置。第一齿圈237与第二齿圈238与第三齿圈239均一体地旋转。第一齿圈237、第二齿圈238以及第三齿圈239分别与第一行星齿轮231、第二行星齿轮232以及第三行星齿轮233啮合。
[0315]
第一轮架240、第二轮架241以及第三轮架242在同轴上串联地配置。第一轮架240与第二轮架241与第三轮架242彼此相对旋转。第一轮架240将第一行星齿轮231保持为能自转且能公转。第二轮架241将第二行星齿轮232保持为能自转且能公转。第三轮架242将第三行星齿轮233保持为能自转且能公转。
[0316]
各齿圈237、238、239连结于致动器105的控制转矩输出轴105a。第一轮架240连结于第二太阳轮109b、即差动机构102的第一差动反作用力元件113。第一太阳轮234和第一齿圈237一起与第一行星齿轮231啮合。此外,第二轮架241连结于第二太阳轮110b、即差动机构102的第二差动反作用力元件115。第二太阳轮235和第二齿圈238一起与第二行星齿轮232啮合。
[0317]
因此,第一齿圈237成为控制输入元件119并且成为第一齿轮122,第一轮架240成为第一控制输出元件120,从而构成第一控制行星齿轮机构117。此外,第二齿圈238成为控制输入元件119并且成为第二齿轮125,第二轮架241成为第二控制输出元件123,从而构成第二控制行星齿轮机构118。
[0318]
在图16所示的例子中,包括第一行星齿轮231、第一齿轮122(即第一齿圈237)以及第一太阳轮234的第一齿轮系243的齿轮传动比与包括第二行星齿轮232、第二齿轮125(即第二齿圈238)以及第二太阳轮235的第二齿轮系244的齿轮传动比彼此不同。具体而言,第一齿轮系243中的第一行星齿轮231、第一齿圈237以及第一太阳轮234的齿轮副的齿轮传动比与第二齿轮系244中的第二行星齿轮232、第二齿圈238以及第二太阳轮235的齿轮副的齿轮传动比彼此不同。
[0319]
更具体而言,第一行星齿轮231的齿数与第二行星齿轮232的齿数与第三行星齿轮233的齿数均相等。第一太阳轮234的齿数少于第三太阳轮236的齿数。此外,第二太阳轮235的齿数多于第三太阳轮236的齿数。第一齿圈237的齿数多于第三齿圈239的齿数。此外,第二齿圈238的齿数少于第三齿圈239的齿数。
[0320]
例如,在图16所示的例子中,第一太阳轮234的齿数为“29”,第二太阳轮235的齿数为“31”,第三太阳轮236的齿数为“30”,第一齿圈237的齿数为“67”,第二齿圈238的齿数为“65”,第三齿圈239的齿数为“66”。在该情况下,减速比r成为“r=
±
30”。与以往的通过一般的行星齿轮机构所能实现的减速比大致为4至10左右的情况相比,得到了相对大的减速比。
[0321]
此外,在图16所示的例子中,反转机构106的第一轮架240(第一控制输出元件120)连结于差动机构102的第二齿圈201b(第一差动反作用力元件113)。此外,反转机构106的第二轮架241(第二控制输出元件123)连结于差动机构102的第二齿圈202b(第二差动反作用力元件115)。因此,在该图16所示的转矩矢量分配装置tv中,差动机构102不使用太阳轮来构成。因此,不需要供与各行星齿轮201d、201e、202d、202e对应的太阳轮配置的空间,与之相应地,能使径向的外形小型化。
[0322]
需要说明的是,上述的第一行星齿轮231、第二行星齿轮232和第三行星齿轮233、以及第一太阳轮234、第二太阳轮235和第三太阳轮236、以及第一齿圈237、第二齿圈238和第三齿圈239、以及第一轮架240、第二轮架241和第三轮架242的排列顺序并不限定于图16所示的顺序。例如,也可以是将第一行星齿轮231、第一太阳轮234、第一齿圈237以及第一轮架240与第二行星齿轮232、第二太阳轮235、第二齿圈238以及第二轮架241交换配置而成的构成。
[0323]
〔第十七实施例〕
[0324]
在图17所示的转矩矢量分配装置tv中,与上述的图11中示出的例子相同,差动机构102由第一动力行星齿轮机构141和第二动力行星齿轮机构142构成。第一动力行星齿轮机构141和第二动力行星齿轮机构142均与第一驱动轴103和第二驱动轴104配置在同一旋转轴线al上。此外,与上述的图11中示出的例子相同,具备第一输出转矩减速机构143、第二输出转矩减速机构145以及连结机构144。
[0325]
反转机构106具有:第一行星齿轮251、第二行星齿轮252以及第三行星齿轮253这三组行星齿轮;第一太阳轮254、第二太阳轮255以及第三太阳轮256这三个太阳轮;第一齿圈257、第二齿圈258以及第三齿圈259这三个齿圈;以及第一轮架260、第二轮架261以及第三轮架262这三个轮架。反转机构106配置于动力转矩输出轴108a的中空部分。
[0326]
第一行星齿轮251、第二行星齿轮252以及第三行星齿轮253在同轴上串联地配置。第一行星齿轮251与第二行星齿轮252与第三行星齿轮253彼此相对旋转。
[0327]
第一太阳轮254、第二太阳轮255以及第三太阳轮256在同轴上串联地配置。第一太
阳轮254与第二太阳轮255与第三太阳轮256均一体地旋转。第一太阳轮254、第二太阳轮255以及第三太阳轮256分别与第一行星齿轮251、第二行星齿轮252以及第三行星齿轮253啮合。
[0328]
第一齿圈257、第二齿圈258以及第三齿圈259在同轴上串联地配置。第一齿圈257与第二齿圈258与第三齿圈259均一体地旋转。第一齿圈257、第二齿圈258以及第三齿圈259分别与第一行星齿轮251、第二行星齿轮252以及第三行星齿轮253啮合。
[0329]
第一轮架260、第二轮架261以及第三轮架262在同轴上串联地配置。第一轮架260与第二轮架261与第三轮架262彼此相对旋转。第一轮架260将第一行星齿轮251保持为能自转且能公转。第二轮架261将第二行星齿轮252保持为能自转且能公转。第三轮架262将第三行星齿轮253保持为能自转且能公转。
[0330]
各齿圈257、258、259连结于致动器105的控制转矩输出轴105a。第一轮架260连结于第二太阳轮109b、即差动机构102的第一差动反作用力元件113。第一太阳轮254和第一齿圈257一起与第一行星齿轮251啮合。此外,第二轮架261连结于第二太阳轮110b、即差动机构102的第二差动反作用力元件115。第二太阳轮255和第二齿圈258一起与第二行星齿轮252啮合。
[0331]
因此,第一齿圈257成为控制输入元件119并且成为第一齿轮122,第一轮架260成为第一控制输出元件120,从而构成第一控制行星齿轮机构117。此外,第二齿圈258成为控制输入元件119并且成为第二齿轮125,第二轮架261成为第二控制输出元件123,从而构成第二控制行星齿轮机构118。
[0332]
在图17所示的例子中,包括第一行星齿轮251和第一齿轮122(即第一齿圈257)的第一齿轮系263的齿轮传动比与包括第二行星齿轮252和第二齿轮125(即第二齿圈258)的第二齿轮系264的齿轮传动比彼此不同。具体而言,第一齿轮系263中的第一齿圈257、第一行星齿轮251以及第一太阳轮254的齿轮副的齿轮传动比与第二齿轮系264中的第二齿圈258、第二行星齿轮252以及第二太阳轮255的齿轮副的齿轮传动比彼此不同。
[0333]
更具体而言,第一齿圈257的齿数与第二齿圈258的齿数与第三齿圈259的齿数均相等。第一行星齿轮251的齿数少于第三行星齿轮253的齿数,并且第二行星齿轮252的齿数多于第三行星齿轮253的齿数。第一太阳轮254的齿数多于第三太阳轮256的齿数,并且第二太阳轮255的齿数少于第三太阳轮256的齿数。
[0334]
例如,在图17所示的例子中,各齿圈257、258、259的齿数为“90”,第一太阳轮254的齿数为“45”,第二太阳轮255的齿数为“18”,第三太阳轮256的齿数为“30”。在该情况下,减速比r成为“r=
±
3”。在该图17所示的转矩矢量分配装置tv中,例如与上述的图10中示出的例子相比,所得到的减速比相对小。但是,在该图17所示的例子中,施加于反转机构106的负荷变小,因此,与之相应地,能使反转机构106小型化。因此,能使转矩矢量分配装置tv的外形小型化。
[0335]
需要说明的是,上述的第一行星齿轮251、第二行星齿轮252和第三行星齿轮253、以及第一太阳轮254、第二太阳轮255和第三太阳轮256、以及第一齿圈257、第二齿圈258和第三齿圈259、以及第一轮架260、第二轮架261和第三轮架262的排列顺序并不限定于图17所示的顺序。例如,也可以是将第一行星齿轮251、第一太阳轮254、第一齿圈257以及第一轮架260与第二行星齿轮252、第二太阳轮255、第二齿圈258以及第二轮架261交换配置而成的
构成。
[0336]
〔第十八实施例〕
[0337]
在图18所示的转矩矢量分配装置tv中,与上述的图11中示出的例子相同,差动机构102由第一动力行星齿轮机构141和第二动力行星齿轮机构142构成。第一动力行星齿轮机构141和第二动力行星齿轮机构142均与第一驱动轴103和第二驱动轴104配置在同一旋转轴线al上。此外,与上述的图11中示出的例子相同,具备第一输出转矩减速机构143、第二输出转矩减速机构145以及连结机构144。
[0338]
反转机构106具有:第一行星齿轮271、第二行星齿轮272以及第三行星齿轮273这三组行星齿轮;第一太阳轮274、第二太阳轮275以及第三太阳轮276这三个太阳轮;齿圈277;以及第一轮架278和第二轮架279这两个轮架。反转机构106配置于动力转矩输出轴108a的中空部分。
[0339]
第一行星齿轮271、第二行星齿轮272以及第三行星齿轮273在同轴上串联地配置。第一行星齿轮271与第三行星齿轮273在自转方向上一体地旋转。第一行星齿轮271和第三行星齿轮273与第二行星齿轮272彼此相对旋转。
[0340]
第一太阳轮274、第二太阳轮275以及第三太阳轮276在同轴上串联地配置。第一太阳轮274与第三太阳轮276相对旋转。此外,第二太阳轮275与第三太阳轮276相对旋转。第一太阳轮274、第二太阳轮275以及第三太阳轮276分别与第一行星齿轮271、第二行星齿轮272以及第三行星齿轮273啮合。第三太阳轮276被固定为不能旋转。在图18所示的例子中,第三太阳轮276固定于壳体107。
[0341]
齿圈277与第二行星齿轮272啮合。齿圈277被固定为不能旋转。在图18所示的例子中,齿圈277固定于壳体107。
[0342]
第一轮架278和第二轮架279在同轴上串联地配置。第一轮架278与第二轮架279彼此相对旋转。第一轮架278将第一行星齿轮271和第三行星齿轮273分别保持为能自转且能公转。第二轮架279将第二行星齿轮272保持为能自转且能公转。第一轮架278连结于第二太阳轮275。
[0343]
第一轮架278连结于致动器105的控制转矩输出轴105a。第一太阳轮274连结于第二太阳轮109b、即差动机构102的第一差动反作用力元件113。第一太阳轮274与第一行星齿轮271彼此啮合。此外,第二轮架279连结于第二太阳轮110b、即差动机构102的第二差动反作用力元件115。第二太阳轮275和齿圈277一起与第二行星齿轮272啮合。
[0344]
因此,第一轮架278成为控制输入元件119,第一太阳轮274成为第一控制输出元件120并且成为第一齿轮122,从而构成第一控制行星齿轮机构117。此外,第二太阳轮275成为控制输入元件119并且成为第二齿轮125,第二轮架279成为第二控制输出元件123,从而构成第二控制行星齿轮机构118。
[0345]
在图18所示的例子中,包括第一行星齿轮271和第一齿轮122(即第一太阳轮274)的第一齿轮系280的齿轮传动比与包括第二行星齿轮272和第二齿轮125(即第二太阳轮275)的第二齿轮系281的齿轮传动比彼此不同。具体而言,第一齿轮系280中的第一行星齿轮271和第一太阳轮274的齿轮副的齿轮传动比与第二齿轮系281中的齿圈277、第二行星齿轮272以及第二太阳轮275的齿轮系的齿轮传动比彼此不同。换言之,致动器105的控制转矩经由第一轮架278、第一行星齿轮271以及第一太阳轮274而被传递至差动机构102的第一差
动反作用力元件113的齿轮传递路径282的齿轮传动比与致动器105的控制转矩经由第一轮架278、第二太阳轮275、第二行星齿轮272以及第二轮架279而被传递至差动机构102的第二差动反作用力元件115的齿轮传递路径283的齿轮传动比彼此不同。
[0346]
例如,在图18所示的例子中,第一太阳轮274的齿数为“20”,第一行星齿轮271的齿数为“25”,第二太阳轮275的齿数为“30”,第二行星齿轮272的齿数为“30”,齿圈277的齿数为“90”。此外,第三太阳轮276的齿数为“20”,第三行星齿轮273的齿数为“20”。其结果是,第一太阳轮274和第一行星齿轮271的齿轮副的齿轮传动比即齿轮传递路径282的齿轮传动比与第二太阳轮275、第二行星齿轮272以及齿圈277的齿轮系(行星齿轮机构)的齿轮传动比即齿轮传递路径283的齿轮传动比彼此不同。并且,在该情况下,减速比r成为“r=
±
4”。在该图18所示的转矩矢量分配装置tv中,例如与上述的图10中示出的例子相比,所得到的减速比相对小。但是,在该图18所示的例子中,与上述的图17中示出的例子同样,施加于反转机构106的负荷变小,因此,与之相应地,能使反转机构106小型化。因此,能使转矩矢量分配装置tv的外形小型化。
[0347]
需要说明的是,上述的第一行星齿轮271、第二行星齿轮272和第三行星齿轮273、以及第一太阳轮274、第二太阳轮275和第三太阳轮276、以及齿圈277、以及第一轮架278和第二轮架279的排列顺序并不限定于图18所示的顺序。例如,也可以是将第一行星齿轮271和第三行星齿轮273、以及第一太阳轮274和第三太阳轮276、以及第一轮架278与第二行星齿轮272、第二太阳轮275、齿圈277以及第二轮架279交换配置而成的构成。
[0348]
〔第十九实施例〕
[0349]
在图19所示的转矩矢量分配装置tv中,与上述的图12中示出的例子相同,差动机构102由第一动力行星齿轮机构161和第二动力行星齿轮机构162构成。第一动力行星齿轮机构161和第二动力行星齿轮机构162均与第一驱动轴103和第二驱动轴104配置在同一旋转轴线al上。此外,与上述的图12中示出的例子相同,具备齿轮系165和齿轮系168。此外,与上述的图12中示出的例子相同,动力源即电动马达108分别具有在同轴上左右分开并突出的第一动力转矩输出轴108b和第二动力转矩输出轴108c。
[0350]
在图19所示的例子中,致动器105具有第一旋转轴105b和第二旋转轴105c来作为控制转矩输出轴105a。第一旋转轴105b和第二旋转轴105c在同轴上左右对置地配置。第一旋转轴105b向第一驱动轴103侧(图19的左侧)突出。在第一旋转轴105b的突出部分装配有后述的反转机构106的第一太阳轮293。第二旋转轴105c向第二驱动轴104侧(图19的右侧)突出。在第二旋转轴105c的突出部分装配有后述的反转机构106的第二太阳轮294。
[0351]
反转机构106具有:第一行星齿轮291和第二行星齿轮292这两组行星齿轮;第一太阳轮293和第二太阳轮294这两个太阳轮;第一齿圈295和第二齿圈296这两个齿圈;以及第一轮架297和第二轮架298这两个轮架。
[0352]
第一行星齿轮291和第二行星齿轮292在同轴上串联地配置。第一行星齿轮291与第二行星齿轮292彼此相对旋转。
[0353]
第一太阳轮293和第二太阳轮294在同轴上串联地配置。第一太阳轮293与第二太阳轮294彼此相对旋转。第一太阳轮293和第二太阳轮294分别与第一行星齿轮291和第二行星齿轮292啮合。
[0354]
第一齿圈295和第二齿圈296在同轴上串联地配置。第二齿圈296与第一齿圈295相
对旋转。第一齿圈295和第二齿圈296分别与第一行星齿轮291和第二行星齿轮292啮合。第一齿圈295被固定为不能旋转。在图19所示的例子中,第一齿圈295固定于壳体107。
[0355]
第一轮架297和第二轮架298在同轴上串联地配置。第一轮架297与第二轮架298相对旋转。第一轮架297将第一行星齿轮291保持为能自转且能公转。第二轮架298将第二行星齿轮292保持为能自转。第二轮架298被固定为不能旋转。在图19所示的例子中,第二轮架298固定于壳体107。
[0356]
第一太阳轮293连结于致动器105的第一旋转轴105b(控制转矩输出轴105a)。第一轮架297连结于第一动力行星齿轮机构161的太阳轮161a、即差动机构102的第一差动反作用力元件113。第一太阳轮293和第一齿圈295一起与第一行星齿轮291啮合。此外,第二太阳轮294连结于致动器105的第二旋转轴105c(控制转矩输出轴105a)。第二齿圈296连结于第二动力行星齿轮机构162的太阳轮162a、即差动机构102的第二差动反作用力元件115。第二太阳轮294和第二齿圈296一起与第二行星齿轮292啮合。
[0357]
因此,第一太阳轮293成为控制输入元件119并且成为第一齿轮122,第一轮架297成为第一控制输出元件120,从而构成第一控制行星齿轮机构117。此外,第二太阳轮294成为控制输入元件119,第二齿圈296成为第二控制输出元件123并且成为第二齿轮125,从而构成第二控制行星齿轮机构118。
[0358]
在图19所示的例子中,包括第一行星齿轮291和第一齿轮122(即第一太阳轮293)的第一齿轮系299的齿轮传动比与包括第二行星齿轮292和第二齿轮125(即第二齿圈296)的第二齿轮系300的齿轮传动比彼此不同。具体而言,包括第一太阳轮293、第一行星齿轮291以及第一齿圈295的第一齿轮系299的齿轮传动比与包括第二太阳轮294、第二行星齿轮292以及第二齿圈296的第二齿轮系300的齿轮传动比彼此不同。换言之,致动器105的控制转矩经由第一太阳轮293、第一行星齿轮291以及第一轮架297而被传递至差动机构102的第一差动反作用力元件113的齿轮传递路径301的齿轮传动比与致动器105的控制转矩经由第二太阳轮294、第二行星齿轮292以及第二齿圈296而被传递至差动机构102的第二差动反作用力元件115的齿轮传递路径302的齿轮传动比彼此不同。
[0359]
例如,在图19所示的例子中,第一太阳轮293的齿数为“30”,第一齿圈295的齿数为“90”,第二太阳轮294的齿数为“24”,第二齿圈296的齿数为“96”。其结果是,齿轮传递路径301的齿轮传动比与齿轮传递路径302的齿轮传动比彼此不同。并且,在该情况下,减速比r成为“r=
±
4”。在该图19所示的转矩矢量分配装置tv中,例如与上述的图10中示出的例子相比,所得到的减速比相对小。但是,在该图19所示的例子中,与上述的图17、图18中示出的例子同样,施加于反转机构106的负荷变小,因此,与之相应地,能使反转机构106小型化。因此,能使转矩矢量分配装置tv的外形小型化。
[0360]
需要说明的是,上述的第一行星齿轮291和第二行星齿轮292、以及第一太阳轮293和第二太阳轮294、以及第一齿圈295和第二齿圈296、以及第一轮架297和第二轮架298的排列顺序并不限定于图19所示的顺序。例如,也可以是将第一行星齿轮291、第一太阳轮293、第一齿圈295以及第一轮架297与第二行星齿轮292、第二太阳轮294、第二齿圈296以及第二轮架298交换配置而成的构成。
[0361]
〔第二十实施例、第二十一实施例、第二十二实施例〕
[0362]
图20、图21、图22所示的转矩矢量分配装置tv中的反转机构106均由左右分开配置
的复合行星齿轮机构构成。
[0363]
在图20所示的例子中,反转机构106由第一控制行星齿轮机构311和第二控制行星齿轮机构312构成。第一控制行星齿轮机构311和第二控制行星齿轮机构312均与第一驱动轴103和第二驱动轴104配置在同一旋转轴线al上。
[0364]
第一控制行星齿轮机构311和第二控制行星齿轮机构312分别由将两组行星齿轮机构组合而成的复合行星齿轮机构构成。
[0365]
第一控制行星齿轮机构311具有第一太阳轮311a、第二太阳轮311b、第一齿圈311c、第二齿圈311d、第一轮架311e以及第二轮架311f。第一太阳轮311a与第二太阳轮311b在同轴上串联地配置。第一太阳轮311a与第二太阳轮311b一体地旋转。第一齿圈311c与第二齿圈311d在同轴上串联地配置。第一齿圈311c与第二齿圈311d一体地旋转。第一轮架311e与第二轮架311f在同轴上串联地配置。第一轮架311e被固定为不能旋转。第二轮架311f与第一轮架311e相对旋转。
[0366]
第一太阳轮311a和第二太阳轮311b连结于致动器105的第一旋转轴105b(控制转矩输出轴105a)。第二轮架311f连结于第一动力行星齿轮机构161的太阳轮161a、即差动机构102的第一差动反作用力元件113。
[0367]
第二控制行星齿轮机构312具有第一太阳轮312a、第二太阳轮312b、第一齿圈312c、第二齿圈312d、第一轮架312e以及第二轮架312f。第一太阳轮312a与第二太阳轮312b在同轴上串联地配置。第一太阳轮312a与第二太阳轮312b一体地旋转。第一齿圈312c与第二齿圈312d在同轴上串联地配置。第一齿圈312c与第二齿圈312d一体地旋转。第一轮架312e与第二轮架312f在同轴上串联地配置。第一轮架312e被固定为不能旋转。第二轮架312f与第一轮架312e相对旋转。
[0368]
第一太阳轮312a和第二太阳轮312b连结于致动器105的第二旋转轴105c(控制转矩输出轴105a)。第二轮架312f连结于第二动力行星齿轮机构162的太阳轮162a、即差动机构102的第二差动反作用力元件115。
[0369]
在图21所示的例子中,反转机构106由第一控制行星齿轮机构321和第二控制行星齿轮机构322构成。第一控制行星齿轮机构321和第二控制行星齿轮机构322均与第一驱动轴103和第二驱动轴104配置在同一旋转轴线al上。
[0370]
第一控制行星齿轮机构321和第二控制行星齿轮机构322分别由将两组行星齿轮机构组合而成的复合行星齿轮机构构成。
[0371]
第一控制行星齿轮机构321具有太阳轮321a、第一齿圈321b、第二齿圈321c、第一轮架321d以及第二轮架321e。第一齿圈321b与第二齿圈321c在同轴上串联地配置。第一齿圈321b被固定为不能旋转。第二齿圈321c与第一齿圈321b相对旋转。第一轮架321d与第二轮架321e在同轴上串联地配置。第一轮架321d与第二轮架321e彼此相对旋转。
[0372]
太阳轮321a连结于致动器105的第一旋转轴105b(控制转矩输出轴105a)。第二齿圈321c连结于第一动力行星齿轮机构161的太阳轮161a、即差动机构102的第一差动反作用力元件113。
[0373]
第二控制行星齿轮机构322具有太阳轮322a、第一齿圈322b、第二齿圈322c、第一轮架322d以及第二轮架322e。第一齿圈322b与第二齿圈322c在同轴上串联地配置。第一齿圈322b被固定为不能旋转。第二齿圈322c与第一齿圈322b相对旋转。第一轮架322d与第二
轮架322e在同轴上串联地配置。第一轮架322d与第二轮架322e彼此相对旋转。
[0374]
太阳轮322a连结于致动器105的第二旋转轴105c(控制转矩输出轴105a)。第二齿圈322c连结于第二动力行星齿轮机构162的太阳轮162a、即差动机构102的第二差动反作用力元件115。
[0375]
在图22所示的例子中,反转机构106由第一控制行星齿轮机构331和第二控制行星齿轮机构332构成。第一控制行星齿轮机构331和第二控制行星齿轮机构332均与第一驱动轴103和第二驱动轴104配置在同一旋转轴线al上。
[0376]
第一控制行星齿轮机构331和第二控制行星齿轮机构332分别由将两组行星齿轮机构组合而成的复合行星齿轮机构构成。
[0377]
第一控制行星齿轮机构331具有第一太阳轮331a、第二太阳轮331b、齿圈331c、第一轮架331d以及第二轮架331e。第一太阳轮331a与第二太阳轮331b在同轴上串联地配置。第一太阳轮331a与第二太阳轮331b彼此相对旋转。第一轮架331d与第二轮架331e在同轴上串联地配置。第一轮架331d与第二轮架331e彼此相对旋转。
[0378]
齿圈331c连结于致动器105的第一旋转轴105b(控制转矩输出轴105a)。第二太阳轮331b连结于第一动力行星齿轮机构161的太阳轮161a、即差动机构102的第一差动反作用力元件113。第一太阳轮331a与第二控制行星齿轮机构332的第一太阳轮332a连结。第一太阳轮331a与第一太阳轮332a一体地旋转。
[0379]
第二控制行星齿轮机构332具有第一太阳轮332a、第二太阳轮332b、齿圈332c、第一轮架332d以及第二轮架332e。第一太阳轮332a与第二太阳轮332b在同轴上串联地配置。第一太阳轮332a与第二太阳轮332b彼此相对旋转。第一轮架332d与第二轮架332e在同轴上串联地配置。第一轮架332d与第二轮架332e彼此相对旋转。
[0380]
齿圈332c连结于致动器105的第二旋转轴105c(控制转矩输出轴105a)。第二太阳轮332b连结于第二动力行星齿轮机构162的太阳轮162a、即差动机构102的第二差动反作用力元件115。
[0381]
对于上述的第十实施例(图10)、第十一实施例(图11)、第十二实施例(图12)、第十三实施例(图13)、第十四实施例(图14)、第十五实施例(图15)、第十六实施例(图16)、第十七实施例(图17)、第十八实施例(图18)、第十九实施例(图19)、第二十实施例(图20)、第二十一实施例(图21)以及第二十二实施例(图22)的各转矩矢量分配装置tv中的差动机构102而言,均为输入构件101与动力输入元件111连结。第一动力输出元件112与第一驱动轴103连结。第二动力输出元件114与第二驱动轴104连结。此外,第一差动反作用力元件113和第二差动反作用力元件115经由反转机构106连结于致动器105。对于上述的第十实施例至第二十二实施例的各转矩矢量分配装置tv中的反转机构106而言,均为致动器105与控制输入元件119连结。第一齿轮122形成控制输入元件119或第一控制输出元件120。第二齿轮125形成控制输入元件119或第二控制输出元件123。并且,反转机构106均被配置为将输入至控制输入元件119的控制转矩放大并传递至第一差动反作用力元件113和第二差动反作用力元件115。
[0382]
因此,根据上述的第十实施例至第二十二实施例的各转矩矢量分配装置tv,能通过反转机构6将致动器105的控制转矩放大并传递至差动机构102的第一差动反作用力元件113和第二差动反作用力元件115。因此,能与通过反转机构6的减速功能来放大控制转矩相
应地谋求致动器5的小型化。进而,能使转矩矢量分配装置tv的外形小型化。其结果是,能容易地将小型化后的转矩矢量分配装置tv搭载于车辆。
[0383]
在上述的第十实施例(图10)、第十二实施例(图12)、第十三实施例(图13)、第十四实施例(图14)、第十五实施例(图15)、第十六实施例(图16)、第十九实施例(图19)、第二十实施例(图20)、第二十一实施例(图21)以及第二十二实施例(图22)的各转矩矢量分配装置tv中,差动机构102均形成第一控制行星齿轮机构117(或311、321、331)和第二控制行星齿轮机构118(或312、322、332)将控制转矩放大的减速齿轮机构。此外,对于上述的各转矩矢量分配装置tv中的反转机构106而言,均将由第一控制行星齿轮机构117(或311、321、331)放大后的控制转矩传递至第一差动反作用力元件113,将由第二控制行星齿轮机构118(或312、322、332)放大后的控制转矩传递至第二差动反作用力元件115。因此,在反转机构106中得到了相对大的减速比。因此,在上述的各转矩矢量分配装置tv中,能通过反转机构106的减速功能(转矩放大作用)来谋求致动器5的小型化,进而,能使转矩矢量分配装置tv的外形小型化。
[0384]
对于上述的第十一实施例(图11)、第十七实施例(图17)以及第十八实施例(图18)的各转矩矢量分配装置tv而言,均具备在同轴上左右对置地配置的第一输出转矩减速机构143和第二输出转矩减速机构145,所述第一输出转矩减速机构143将传递至第一驱动轴103的转矩放大,所述第二输出转矩减速机构145将传递至第二驱动轴104的转矩放大。对于上述的各转矩矢量分配装置tv中的差动机构102而言,第一动力输出元件112与第一驱动轴103经由第一输出转矩减速机构143连结。第二动力输出元件114与第二驱动轴104经由第二输出转矩减速机构145连结。此外,上述的各转矩矢量分配装置tv中的反转机构106配置于旋转轴线al方向上的第一输出转矩减速机构143与第二输出转矩减速机构145之间。因此,在反转机构106中,虽然所得到的减速比相对变小,但是施加于反转机构106的负荷变低。因此,在上述的各转矩矢量分配装置tv中,能与反转机构106的负荷变低相应地谋求致动器5的小型化,进而,能使转矩矢量分配装置tv的外形小型化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1