油罐车AIP网络智能阀的制作方法
油罐车aip网络智能阀
技术领域
1.本实用新型涉及一种新型阀门系统,具体涉及一种油罐车 aip网络智能阀。
背景技术:
2.目前的阀门锁大部分采用电子锁的方式来控制阀门开启或关闭,但是这些设备都存在较多的不足之处,如设备笨重、体积大而且不够安全,而且电子锁操作过程复杂、繁琐,需要专业人士使用,不适合大面积推广和使用,还有的油罐车出油口有防爆要求,但一般阀门锁并不能满足防爆要求。
3.由于上述原因,本发明人对现有的油罐车及其上的卸油阀做了深入研究,以期待设计出一种能够解决上述问题的新的油罐车aip网络智能阀。
技术实现要素:
4.为了克服上述问题,本发明人进行了锐意研究,设计出一种油罐车aip网络智能阀,该阀具有断电自动上锁和防拆卸功能,其上还配备有可控制的海底阀气动系统,并从根本上去掉了以往国内其他同类产品的阀门锁、备用电池等其他部件。所述油罐车卸油阀中设置有气动锁系统,确保在一般状况下阀门都处于关闭且锁死状态,即使通过开阀系统也不能开启阀门,只有在气动锁系统开启后才能通过开阀系统开启阀门,从而确保油的安全,并且该气动锁系统可以远程控制,自身也与多个传感器相连,实现远程化、智能化控制,从而完成本实用新型。
5.具体来说,本实用新型的目的在于提供一种智能阀,
6.该智能阀包括阀体,在所述阀体内侧底部设置有阀门,在阀体的内部,在阀门上方设置有与阀门固接并带动阀门上下移动的阀杆,
7.该智能阀还包括开阀系统和气动锁系统,
8.其中,所述开阀系统与所述阀杆相连,通过开阀系统控制阀杆上下移动,进而控制阀门的关闭与开启;
9.所述气动锁系统的锁头能够伸入到阀杆中;当锁头伸入到阀杆中时阀门锁死,阀门不可开启;当锁头从阀杆中脱离时阀门能够开启。
10.其中,在所述阀体中设置有支撑架,所述阀杆安装在所述支撑架中,
11.通过支撑架限定阀杆的移动方向,使得阀杆仅能够沿着竖直方向上下移动。
12.其中,所述开阀系统包括传动杆,所述传动杆伸入到阀体中,并可转动地安装在支撑架上;
13.在传动杆和阀杆之间设置有传力机构,用以将传动杆的旋转运动转换为阀杆的上下运动。
14.其中,所述开阀系统为手动开阀系统或者自动开阀系统;
15.所述手动开阀系统包括位于阀体外部的摇臂,所述摇臂与传动杆相连,
16.通过所述摇臂带动所述传动杆旋转,即可带动阀杆及与之相连的阀门上下移动;
17.所述自动开阀系统包括位于阀体外部的马达,马达的输出轴与传动杆相连,通过所述马达带动所述传动杆旋转,即可带动阀杆及与之相连的阀门上下移动。
18.其中,当所述开阀系统为手动开阀系统时,在所述阀体的外壁上设置有限位销,在所述摇臂的端部设置有豁槽,
19.当所述摇臂带动传动杆旋转并使得阀门关闭时,该摇臂上的豁槽能够刚好嵌套在所述限位销的外部;
20.当豁槽嵌套在限位销的外部时,通过传动杆和限位销限位并固定述摇臂。
21.其中,在所述阀杆侧部上方开设有盲孔,
22.当所述气动锁系统的锁头伸入到该盲孔中时,锁头阻碍阀杆的上下运动,阀门锁死并关闭。
23.其中,所述气动锁系统还包括缸体和与缸体通过气管相连的气泵,
24.在缸体中设置有密封活塞,在所述密封活塞上设置有拉杆,所述锁头位于所述拉杆的端部;
25.所述锁头在密封活塞的带动下往复移动。
26.其中,在所述拉杆的外部套设有压缩弹簧,通过所述压缩弹簧压迫锁头,使得锁头保持伸出状态。
27.其中,该卸油阀还包括与气动锁系统相连的控制系统;通过控制系统控制气泵,从而控制锁头是否伸入到阀体中。
28.其中,所述控制系统包括传感器和远程交互模块,
29.所述传感器包括用于感应油罐车行进与否的振动传感器、设置在油管中的用于感应是否有油流过的流体传感器、设置在阀门附近的用于感应阀门是否开启的阀门传感器;
30.通过远程交互模块接收外界指令信息,还能够通过该远程交互模块传递出传感器感应到的信息。
31.本实用新型所具有的有益效果包括:
32.(1)根据本实用新型提供的智能阀上设置有气动锁系统,能够远程控制锁死阀门,也能够根据传感器接收到的信息自行判断控制阀门的开启或者关闭;
33.(2)根据本实用新型提供的智能阀将气动锁系统和开阀系统都集合到阀体上,从而简化安装过程,减小设备体积,增加使用安全性,进而提高设备整体的可靠性。
附图说明
34.图1示出根据本实用新型一种优选实施方式的智能阀整体结构示意图;
35.图2示出根据本实用新型一种优选实施方式的智能阀上省略阀杆时的结构示意图;
36.图3示出根据本实用新型一种优选实施方式的智能阀上阀杆及与之相连的阀门结构示意图;
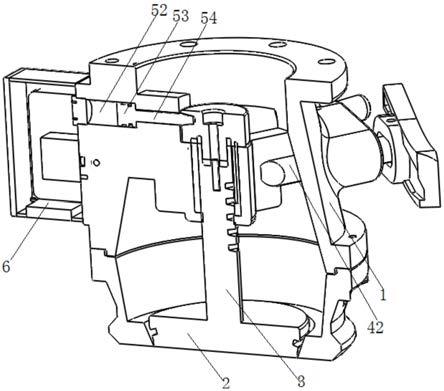
37.图4示出根据本实用新型一种优选实施方式的智能阀整体剖视图;
38.图5示出根据本实用新型一种优选实施方式的智能阀的开阀系统为自动开阀系统时的结构示意图。
39.附图标号说明:
[0040]1‑
阀体
[0041]
11
‑
支撑架
[0042]2‑
阀门
[0043]3‑
阀杆
[0044]
31
‑
盲孔
[0045]4‑
开阀系统
[0046]
41
‑
摇臂
[0047]
42
‑
传动杆
[0048]
43
‑
限位销
[0049]
44
‑
豁槽
[0050]
45
‑
马达
[0051]5‑
气动锁系统
[0052]
51
‑
锁头
[0053]
52
‑
缸体
[0054]
53
‑
密封活塞
[0055]
54
‑
拉杆
[0056]6‑
控制系统
具体实施方式
[0057]
下面通过附图和实施例对本实用新型进一步详细说明。通过这些说明,本实用新型的特点和优点将变得更为清楚明确。
[0058]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0059]
根据本实用新型提供的油罐车aip网络智能阀,如图1和图 4中所示,该智能阀包括阀体1,所述阀体1程类筒型,可以有两个或多个筒状结构拼接固定形成,在所述阀体1内侧底部设置有阀门2,在阀体1的内部,在阀门2上方设置有与阀门2固接并带动阀门2上下移动的阀杆3,
[0060]
该智能阀还包括开阀系统4和气动锁系统5,
[0061]
其中,所述开阀系统4与所述阀杆3相连,通过开阀系统4 控制阀杆3上下移动,进而控制阀门2的关闭与开启;
[0062]
所述气动锁系统5的锁头51能够伸入到阀杆3中;当锁头51 伸入到阀杆3中时阀门2锁死,阀门2不可开启,即此时由开阀系统4提供作用力,作用在阀杆3上,也不能使得阀门开启;当锁头51从阀杆3中脱离时阀门2能够开启,即此时由开阀系统4提供作用在阀杆3上的作用力能够使得阀门开启。
[0063]
优选地,在所述阀体1中设置有支撑架11,所述阀杆3安装在所述支撑架11中,所述支撑架与阀体1固结为一体结构,所述支撑架11是固定不动的;
[0064]
通过支撑架11限定阀杆3的移动方向,使得阀杆3仅能够沿着竖直方向上下移动,优选地,所述支撑架包括竖直设置的通孔状结构,用以容纳所述阀杆3。
[0065]
在一个优选的实施方式中,如图1和图2中所示,所述开阀系统4包括传动杆42,所述传动杆42伸入到阀体1中,并可转动地安装在支撑架11上。
[0066]
优选地,在传动杆42和阀杆3之间设置有传力机构,用以将传动杆42的旋转运动转换为阀杆3的上下运动;所述传力机构可以是齿轮结构,也可以是涡轮蜗杆结构,可以根据具体型号要求选择使用。
[0067]
所述开阀系统4为手动开阀系统或者自动开阀系统;
[0068]
所述手动开阀系统包括位于阀体1外部的摇臂41,所述摇臂 41与传动杆42相连,
[0069]
通过所述摇臂41带动所述传动杆42旋转,即可带动阀杆3 及与之相连的阀门2上下移动。其中,所述摇臂41还能够相对于传动杆42往复摆动,即在所述摇臂41上开设腰型孔,所述传动杆42插入到所述腰型孔中,且通过贯穿腰型孔的销轴将摇臂41 和传动杆42彼此固定连接。
[0070]
进一步优选地,在所述阀体1的外壁上设置有限位销43,在所述摇臂41的端部设置有豁槽44,
[0071]
当所述摇臂41带动传动杆42旋转并使得阀门2关闭时,该摇臂41上的豁槽44能够刚好嵌套在所述限位销43的外部;
[0072]
当豁槽44嵌套在限位销43的外部时,通过传动杆42和限位销43限位并固定述摇臂41。即通过所述限位销43和摇臂41的彼此配合,将阀门处于关闭状态时的摇臂41固定住,防止摇臂被误触。
[0073]
在另一种优选的实施方式中,如图5中所示,所述自动开阀系统包括位于阀体1外部的马达45,马达的输出轴与传动杆42 相连,通过所述马达45带动所述传动杆42旋转,即可带动阀杆3 及与之相连的阀门2上下移动。
[0074]
在一个优选的实施方式中,如图3中所示,在所述阀杆3侧部上方开设有盲孔31,
[0075]
当所述气动锁系统5的锁头51伸入到该盲孔31中时,锁头51 阻碍阀杆3的上下运动,阀门2锁死并关闭,通过盲孔31与锁头 51之间的配合,实现气动锁锁死阀杆3的操作目的。
[0076]
在一个优选的实施方式中,如图4中所示,所述气动锁系统 5还包括缸体52和与缸体52通过气管相连的气泵,
[0077]
在缸体52中设置有密封活塞53,在所述密封活塞53上设置有拉杆54,所述锁头51位于所述拉杆54的端部;
[0078]
所述锁头51在密封活塞53的带动下往复移动。
[0079]
优选地,在所述拉杆54的外部套设有压缩弹簧,通过所述压缩弹簧压迫锁头51,使得锁头51保持伸出状态。即在压缩弹簧的作用下,所述锁头保持伸出状态,阀门保持锁死状态,当气动锁系统开始工作时,将拉杆54拉回到缸体52中,从而带动锁头51从盲孔中脱离,进而取消了对阀杆3的限位,阀杆3能够在外力作用下移动位置。
[0080]
在一个优选的实施方式中,该卸油阀还包括与气动锁系统5 相连的控制系统6;通过控制系统6控制气泵,从而控制锁头51 是否伸入到阀体3中。
[0081]
优选地,所述控制系统6包括传感器和远程交互模块,
[0082]
所述传感器包括用于感应油罐车行进与否的振动传感器、设置在油管中的用于感应是否有油流过的流体传感器、设置在阀门2附近的用于感应阀门是否开启的阀门传感器;
[0083]
通过远程交互模块接收外界指令信息,还能够通过该远程交互模块传递出传感器感应到的信息。所述外界信息可以是直接控制气动锁系统5工作与否的指令信息,也可以是参数设置信息,通过该参数设置信息,结合当前的传感器感应到的信息自行判断是否启动气动锁系统5。
[0084]
所述远程交互模块可以选自蓝牙模块、4g信号收发装置、 4g信号收发装置、远距离射频装置中的一种或多种;其中,优选地选用所述远距离射频装置,所述远距离射频装置包括射频卡读写单元和射频发射天线。射频卡读写单元具有远距离读写功能,射频天线安装在油罐车的油阀箱内,具体设置在所述油罐车卸油阀上,所述射频发射天线处理为防爆结构,最远读写 8米距离,当油罐车进入装油货位和卸油位置时,即可读取射频卡信息,射频卡无源接触卡,确保在油站和油库使用安全。油罐车装卸油过程中,射频卡是信息传递重要媒介,油罐车到油库装油货位和加油站油罐卸油口车载装置分别读取的油库和加油站射频卡,射频卡内有各种油库、加油站、编号、货位号、油罐号、油品号、和油站和油库gps信息。
[0085]
油罐车到油库货位装油,或到加油站油罐卸油,读取油库货位或加油站卸油罐射频卡信息,装油货位或卸油罐油品信息,车载装置开阀前需比较油罐车油仓油品信息相符后开阀开锁,否则系统报警和语言提示,防止油罐车装错油和卸错油。所述指令信息可以为通过磁卡感应装置感应到的刷卡信息,可以是人脸识别系统通过识别人脸得到的确认信息,也可以是特殊的紧急开锁命令信息,还可以是上述多种信息的任意组合。
[0086]
优选地,所述控制系统6中还包括逻辑处理芯片,能够接收并梳理各个传感器传递来的信息,并且能够根据参数设置信息确定气动锁系统开启的判断条件。
[0087]
在本实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”、“前”、“后”等指示的方位或位置关系为基于本实用新型工作状态下的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0088]
以上结合了优选的实施方式对本实用新型进行了说明,不过这些实施方式仅是范例性的,仅起到说明性的作用。在此基础上,可以对本实用新型进行多种替换和改进,这些均落入本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1