一种基于形状记忆合金的海底管道外检测设备及其检测方法
1.本发明属于能源化工领域,具体涉及一种基于形状记忆合金的水下探测设备及其检测方法。
背景技术:
2.海洋石油工业为国民经济发展做出了重大的贡献,随着海洋大国提高对海洋油气资源的重视,海上油气资源的勘探开发技术不断发展进步。海底管道作为海上油气开发的重要组成部分,为消除海底管道运行隐患,保证海底管道安全稳定运行,延长海底管道使用寿命,对海底管道的内外检测十分必要,海底管道检测技术在不断发展进步的过程中,继续承担着保护海上油气开发“生命线”安全的重要使命。
3.海底管道长期承受工作载荷,工作在复杂的海洋环境中,洋流、盐度浅海、人类活动都会对其造成影响,容易造成管道损伤,如果管道损伤没能及时发现并维修造成事故,那将从量变到质变,不仅会给抢修带来极大困难,而且会对海洋生态环境带来不可估量的损害,带来巨大直接经济损失。文献表明:海底管道从设计到施工,人为操作失误,人类活动影响,自然环境因素都会对海底管道安全带来隐患,然而由于海底管道所处位置的特殊性,在海面肉眼难以直接观测,海底油气管道泄漏相对陆地油气管道泄漏隐患更大,更难发现,一旦发生泄漏,所造成的危害程度更高,处理难度更大,经济损失更严重。因此,海底管道检测对于排除管道安全隐患,保证管道安全具有重大意义。
技术实现要素:
4.为了解决现在市面上水下管道检测设备噪声大、难以维修,并且传统设备采用螺旋桨推进容易受到电缆、海带和废弃渔网等缠绕问题,而人工检测又受到天气、地理位置等因素的影响,我们通过形状记忆合金采用射流方式来进行驱动,在很大程度上能够解决目前管道检测的问题。
5.本发明提供一种基于形状记忆合金的海底管道外检测方法,技术方案如下:
6.通过遥控器对水面上的外置蓝牙发送控制信号,外置蓝牙通过数据线将控制信息传给电路板上的控制芯片,控制芯片控制对应的记忆合金桨通电产生弯曲变形,再断电通过桨的恢复力使整个检测设备移动;在接通记忆合金桨a、记忆合金桨b、记忆合金桨c、记忆合金桨d的电源之后,平台主体通过变形之后的恢复力向前移动,左转时只接通记忆合金桨c与记忆合金桨d的电源,右转时只接通记忆合金桨a与记忆合金桨b的电源,当需要上浮时只接通记忆合金桨e和记忆合金桨f的电源,下沉只需自重就可以做到;并通过摄像头将水下的影像传输给水面的蓝牙模块,通过与蓝牙模块连接的视频设备,实现检测的目的。
7.进一步的,记忆合金桨通电产生150
°
的弯曲变形。
8.进一步的,接通记忆合金桨的电源通过外置蓝牙和遥控器控制电流的接通顺序。
9.本发明简化了传统复杂的机械结构装置,通过形状记忆合金在通电加热条件下产生形变,运用其恢复力来使平台完成前进、后退、上浮等基本运动。本发明还提供一种基于
形状记忆合金的海底管道外检测设备,技术方案如下:
10.包括平台主体,记忆合金桨,阻流器,蓄电池,蓝牙模块,电路板,摄像头,所述记忆合金桨共计四对,其中,记忆合金桨a与记忆合金桨b为一对,两个记忆合金桨c与记忆合金桨d为一对,两个记忆合金桨e为一对,记忆合金桨f为一对,八个记忆合金桨安装在平台主体两侧,中间位置设置的记忆合金桨e、记忆合金桨f与前后设置的记忆合金桨a、记忆合金桨b、记忆合金桨c、记忆合金桨d上下错开安装。
11.进一步的,所述八个记忆合金桨a
‑
f外形均相同,为长100mm,高40mm,厚25mm的长方体。
12.进一步的,所述阻流器的形状为底边长40mm,高70mm的正三棱柱,阻流器安装在每片记忆合金桨的前端部分,阻流器的底边与记忆合金桨远离平台主体的边对齐,侧面与记忆合金桨贴合。
13.进一步的,所述蓄电池安装在电路板上,通过充电插口为记忆合金桨充电。
14.进一步的,所述蓝牙模块通过浮力板外置悬浮在水面之上,采用数据线将蓝牙模块与电路板连接。
15.进一步的,摄像头直接安装在平台主体之上,摄像头可通过手机实时接收画面。
16.本发明与现有技术相比的有益效果是:
17.摒弃了传统的机械设计,通过记忆合金实现快速移动,有助于管道运输行业进行管道的检测。结构简单、成本低廉、易操作、易维护、噪声低、推进效率高,减轻了人力,释放了劳动力,有助于降低检测费用,节约企业成本。
附图说明
18.下面结合附图和实施例对本发明进一步说明。
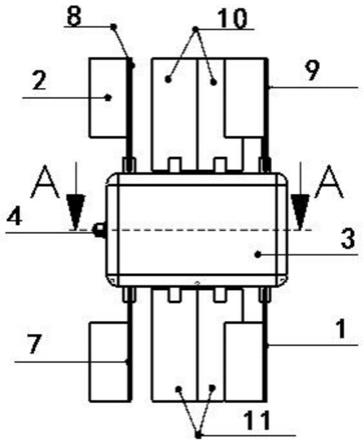
19.图1是本发明的俯视图;
20.图2是图1平台主体的a
‑
a剖面图;
21.图3是本装置的整体正视图。
22.图中:1.记忆合金桨a,2.阻流器,3.平台主体,4.摄像头,5.电路板,6.充电插口,7.记忆合金桨b,8.记忆合金桨c,9.记忆合金桨d,10.记忆合金桨e,11.记忆合金桨f。
具体实施方式
23.下面通过具体实施例详述本发明,但不限制本发明的保护范围。如无特殊说明,本发明所采用的实验方法均为常规方法,所用实验器材、材料、试剂等均可从商业途径获得。
24.实施例1
25.本装置主要由电池供电来使记忆合金片产生形变提供动力,从而达到设计目的:装置的主要机构包含平台主体3,记忆合金桨,阻流器2,蓄电池,蓝牙模块,电路板5,摄像头4。
26.所述记忆合金桨共计四对,其中,记忆合金桨a1与记忆合金桨b9为一对,记忆合金桨c8与记忆合金桨d7为一对,记忆合金桨e10为一对,记忆合金桨f11为一对,八个记忆合金桨安装在平台主体两侧,中间位置设置的记忆合金桨e11、记忆合金桨f10与前后设置的记忆合金桨a1、记忆合金桨b9、记忆合金桨c8、记忆合金桨d7上下错开安装,以消除其变形带
来的互相干扰。
27.所述平台主体3是连接所有主要设备的载体,为了满足不同检测需求,除上述设备之外还可以安装和搭载其他设备。
28.所述阻流器2安装在每片记忆合金桨的前端部分,为了消除主动变形时水流阻力的影响。
29.所述蓄电池安装在电路板5上,通过充电插口6为记忆合金桨充电,通过对电路板5的控制来对记忆合金桨的变形加以控制。
30.所述蓝牙模块通过浮力板外置悬浮在水面之上,采用数据线将蓝牙模块与电路板5连接,以此进行蓝牙控制和数据传输。
31.摄像头4直接安装在平台主体3之上,摄像头4可通过手机实时接收画面,以此来监控探测。
32.实施例2
33.在接通记忆合金桨a1、记忆合金桨b7、记忆合金桨c8、记忆合金桨d9的电源之后,平台主体3通过变形之后的恢复力向前移动,左转时只接通记忆合金桨c8与记忆合金桨d9的电源,右转时只接通记忆合金桨a1与记忆合金桨b7的电源,当需要上浮时只接通记忆合金桨e10和记忆合金桨f11的电源,下沉只需自重就可以做到。通过外置蓝牙和遥控器控制电流的接通顺序,以此达到上述电流接通的目的。
34.实施例3
35.八个记忆合金桨a1
‑
f11外形均相同,为长100mm,高40mm,厚25mm的长方体,记忆合金桨a1
‑
f11前面均安装有底边长40mm,高70mm的正三棱柱阻流器2,阻流器2的底边与记忆合金桨远离平台主体的边对齐,阻流器2的侧面与记忆合金桨贴合。记忆合金桨e10,记忆合金桨f11两对桨与其他记忆合金桨垂直且错开放置,以避免桨通电产生150
°
的弯曲变形时相互干扰。记忆合金桨a1
‑
d9负责平面运动,记忆合金桨e10,记忆合金桨f11两对桨负责上浮运动。
36.通过遥控器对水面上的外置蓝牙发送控制信号,外置蓝牙通过数据线将控制信息传给电路板5上的控制芯片,控制芯片控制对应的记忆合金桨通电向前进方向产生150
°
的弯曲变形,由阻流器来减小通电变形时产生的力的作用避免机器人后退,再断电通过桨恢复到平直状态产生的力使整个机器人移动,并通过摄像头4将水下的影像传输给水面的蓝牙模块,通过与蓝牙模块连接的视频设备,如手机电脑等查看,实现检测的目的。
37.以上所述仅是本发明的优选实施方式,而并非本发明可行实施的全部实施方式。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1