用于使用考虑接触角变化的应变参数估算轴承载荷的方法与流程
[0001]
本发明涉及轴承载荷估算方法的领域。
背景技术:
[0002]
为了感测轴承载荷,已知的是,对于每个传动滚动元件(passing-by rolling element),由传感器位置处的应变信号计算滚动元件载荷。在第二步骤中,由滚动元件载荷重构轴承载荷。
[0003]
应变取决于滚动元件载荷的大小和方向以及传感器相对于滚动元件载荷矢量定位的区域的方位(/位置和方向)。
[0004]
用于估算(/估计)载荷的其他轴承载荷估算方法计算信号振幅(/信号幅度)的量(/测量值/度量)(measure)。已知的计算方法使用峰到峰(/峰峰值)(pkp)方法、均方根方法或绝对应变值的平均值。
[0005]
还已知的是,利用集成到轴承的固定的定圈(/静止圈)中的一系列应变传感器来测量作用在静态的非旋转轴承上的载荷。
[0006]
可以参考文献us2013211742a1、us7,444,888b2和wo2011/128047a1,这些文献描述了配备有应变传感器的传感器轴承以及用于确定作用在具有滚动元件的轴承上的载荷矢量的方法。通常,每个传感器的测量的应变信号包括与传动滚动元件(passing rolling element)对应的一系列尖峰。载荷检测可以包括分析至少一些信号峰值中的信号以获得可靠的信息,例如,对至少一些信号峰值中的信号在一定时间段内求平均值。
[0007]
然而,因为测量的应变信号由于接触角的变化而变化,所以已知的方法可能无法正确地重构实际的总轴承载荷。换句话说,滚动元件的接触角的偏差改变轴承载荷和应变信号的传递函数。
[0008]
因此,使用峰到峰应变来计算轴承载荷的方法可能包含估算不确定性。
[0009]
为了提高轴承载荷估算方法的精度,已经使用整体应变和局部应变来估算轴承载荷。
[0010]
然而,那些方法都不能消除由于滚动元件接触角变化导致的误差。
[0011]
因此,需要消除轴承载荷估算方法中由于滚动元件接触角变化导致的误差。
技术实现要素:
[0012]
因此,本发明的目的在于提供一种具有提高的精度并考虑滚动元件接触角的变化的轴承载荷估算方法。
[0013]
本发明的特别的目的在于提供一种用于估算轴承载荷的载荷估算方法,所述载荷估算方法在具有轴承的轴承组件的电子控制单元(/电控单元)中实施,轴承包括第一圈、第二圈、布置在第一圈与第二圈之间的滚动元件的列,所述圈中的一者配备有至少一个应变传感器探头,所述至少一个应变传感器探头被配置为将应变信号传输至电子控制单元。
[0014]
所述方法包括:使用应变信号的谐波分量来提取应变信号的波形的形状信息。
[0015]
所述方法进一步包括:将轴承载荷估算值作为应变信号的所述谐波分量的多项式函数进行计算。
[0016]
因此,使用表示接触角变化的接触角参数来计算载荷估算值。由应变信号中的谐波分量估算接触角。
[0017]
在一个实施方式中,载荷估算方法包括:
[0018]-使用所述应变信号的至少第一谐波分量和第二谐波分量(例如一次谐波分量和二次谐波分量)来提取应变信号的波形的形状信息;
[0019]-以标量表示先前提取的滚动元件波形的所述第一谐波分量和所述第二谐波分量;并且
[0020]-将轴承载荷估算值作为计算的第一谐波和第二谐波(例如一次谐波和二次谐波)的比率、传感器探头位置和校准常数的多项式函数进行计算。
[0021]
所述第一谐波分量和所述第二谐波分量的功率的比率描述了与接触角变化的关系。
[0022]
在另一实施方式中,所述载荷估算方法针对每个滚动元件使用在滚动方向(/运转方向)(running direction)上间隔开的一个以上的应变传感器探头(例如,两个应变传感器探头),因此在空间域而不是时间域中采样。所述传感器探头在周向上规则地(regularly)间隔开。
[0023]
所述方法包括:
[0024]-使用来自规则地间隔开的传感器探头的应变信号的至少第一谐波分量和第二谐波分量提取应变信号的波形的形状信息;
[0025]-以标量表示先前提取的滚动元件波形的第一谐波分量和第二谐波分量;并且
[0026]-将轴承载荷估算值作为计算的第一谐波和第二谐波的比率、传感器探头位置和校准常数的多项式函数进行计算。
[0027]
例如,载荷估算方法使用两列传感器探头以测量取决于接触角的应变,并计算两列的谐波,每列传感器探头具有至少一个传感器探头,因此进一步提高了滚动元件的位置处的载荷重构的精度。
[0028]
有利地,载荷估算方法针对每个滚动元件使用间隔开且放置在所述圈中的一者上的大于一个(例如奇数个,例如,三个、五个或七个)的应变传感器探头,以允许归因于滚动元件载荷矢量的大小和方向的应变信号的特定谐波分量的测量值恰当地摈弃低阶弯曲模式(圈也要承受低阶弯曲模式),因此提高了载荷重构的精度。
[0029]
每个应变传感器探头可以例如包括薄膜直接沉积式应变仪,所述薄膜直接沉积式应变仪使用绝缘涂层和栅格,绝缘涂层位于圈与估算栅格之间,所述栅格通过丝网印刷和传感器探头的金属层的激光退火而沉积成为功能栅格。
[0030]
可以使用其他类型的应变传感器探头,例如钢上厚膜的应变仪,其包括薄板或结构,薄板或结构使用焊接(激光,特别是如wo2011006523(a1)和wo2009056334(a1)中描述的)在两条线处附接到圈,并且被放置和尺寸设计为使得它们有意义地观察在两条焊接线处的表面上的应变差的第一谐波和第二谐波。
[0031]
作为一种选择,每个应变传感器探头包括粘合在所述圈中的一者上或形成在圈中的槽的内部的基于纤维光学的应变仪(/光纤应变仪)。
[0032]
在另一实施方式中,传感器探头包括在至少一列中的至少一个位移传感器,所述至少一个位移传感器用于观察由于滚动元件载荷在腔或槽或另外由应变传感器占据的袋下方传递而引起的在径向方向和周向方向上的相对运动。该运动以谐波项来表示载荷和载荷方向,并且所提出的计算方法对于载荷的估算是有效的。
附图说明
[0033]
通过研究通过非限制性示例给出并由附图说明的具体实施方式的详细描述,将更好地理解本发明及其优点,在附图上:
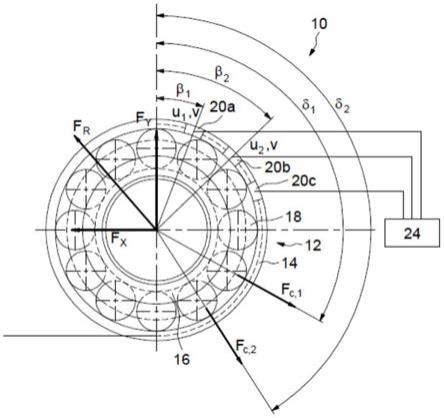
[0034]-图1和图2是轴承组件的示出了轴承力和角度的示意性半剖视图;
[0035]-图3是概述根据本发明的实施方式的轴承载荷估算方法的流程图;以及
[0036]-图4示出了示出使用各种估算方法的轴承载荷估算值与滚动元件的接触角之间的关系的各种曲线。
具体实施方式
[0037]
首先参照图1和图2,图1和图2示出了具有轴承12的轴承组件10的实施方式,载荷被设计成通过根据本发明的载荷估算方法来感测。
[0038]
轴承12包括作为第一圈的静止外圈14、作为第二圈的旋转内圈16、布置在静止外圈14与旋转内圈16之间的滚动元件18(诸如球)的列以及保持架(未示出)。
[0039]
轴承12可以是球轴承类型的。
[0040]
如所示出的,轴承12的外圈14配备有应变传感器探头(/探针)20a、20b、20c。应变传感器探头20a至20c可以是安装在外圈14的径向外表面上或限定的槽或袋(/凹处)(pocket)(未示出)中的应变计(例如微测量仪)。
[0041]
本发明不限于该示例。实际上,轴承的内圈或外圈可以配备有不同数量的应变传感器探头(例如,至少一个应变传感器探头)。
[0042]
应变传感器探头20a至20c连接到电子控制单元(ecu)24,ecu 24被配置为在轴承12运行或静止时接收并处理由应变传感器探头20a-20c获得的信号,并估算轴承载荷。
[0043]
在电子控制单元24中实施载荷估算方法30。载荷估算方法30适用于具有至少一个应变传感器的所有轴承载荷估算装置。
[0044]
载荷估算方法30被配置为使用附加的信号特性(诸如波形的形状信息),以提高接触角估算的精度。
[0045]
实际上,使用峰到峰(/峰峰值)(pkp)方法或均方根方法(rms)的已知方法仅使用信号的振幅的量(/测量值/度量)(measure),因此是不准确的,这是因为它们没有考虑接触角的变化。
[0046]
接触角影响从滚动元件载荷到传感器信号的传递函数。传递函数的输出的受接触角影响的两个基本信号特性是在滚动元件传动时在传感器处感知到的波形的增益和形状。
[0047]
载荷估算方法30的目的在于减少传递函数对接触角的依赖性。
[0048]
载荷估算方法30使用接触角参数u、v作为输入以估算轴承载荷,接触角参数u、v是一次谐波和二次谐波的标量表示。如将进一步描述的,将那些接触角参数u、v与校准参数组合以计算轴承上的轴向载荷和径向载荷的估算值。
[0049]
轴承上的轴向载荷fa等于z个滚动元件载荷矢量fc,j的轴向分量之和,其中,j是滚动元件的索引数。可以根据以下等式使用接触载荷的接触角αj来编写(/表示)轴向分量:
[0050]
[等式1]
[0051][0052]
x方向和y方向上的径向载荷可以被编写为所有滚动元件载荷矢量的径向分量的x投影和y投影的总和。它们由滚动元件的角位置δi定义如下:
[0053]
[等式2]
[0054][0055]
[等式3]
[0056][0057]
使用应变传感器位置βi处的接触角γi做出轴向投影x。
[0058]
轴向载荷估算可以使用函数c如下编写:
[0059]
[等式4]
[0060][0061]
该假设避免了对滚子载荷和滚动元件位置的显式计算。
[0062]
类似地,可以使用应变传感器βi的角位置如下定义x方向和y方向上的径向载荷的估算值:
[0063]
[等式5]
[0064][0065]
[等式6]
[0066][0067]
在等式4至等式6中,ui是通过测量值得出的接触角参数。假定传感器位置βi是已知的,并且c表示应变到载荷的任意恒定映射。
[0068]
载荷估算方法30包括第一步骤32,其中使用信号的至少第一谐波分量u和第二谐波分量v提取波形的形状信息。u和v是接触角参数。因为形状随着接触角的变化而变化,所以那些参数的组合用于提供关于振幅以及波形的形状的信息。
[0069]
形状信息被量化为正弦谐波的功率。可以使用多种方法将谐波从信号中分离,诸如卡尔曼滤波、矢量投影、傅立叶变换之类。那些方法是已知的,并且将不再进一步描述。
[0070]
在框34处,以标量表示在框32处提取的滚动元件18波形的第一谐波分量u和第二谐波分量v。因此,计算出所述第一谐波分量u和第二谐波分量v的功率的比率。所述比率表示接触角变化。
[0071]
在框36处,根据在框34处计算的比率如下估算滚动元件18的接触角:
[0072]
[等式7]
[0073][0074]
在框38处,将轴承载荷估算值作为第一谐波功率标量和第二谐波功率标量的多项式函数进行计算。
[0075]
通过将等式7代入等式4中来如下计算轴向载荷估算值:
[0076]
[等式8]
[0077][0078]
使用校准常数k根据应变参数编写常数cui和cvi:
[0079]
[等式9a]
[0080]
c
ui
=k
ui1
+k
ui2
.u
i
[0081]
[等式9b]
[0082]
c
vi
=k
vi1
+k
vi2
.v
i
[0083]
将等式9a和9b代入等式8中,将单次测量的轴向载荷估算值编写为如下:
[0084]
[等式10]
[0085][0086]
[等式11]
[0087][0088]
其中:
[0089]
un,vn是包含u谐波分量和v谐波分量的矩阵;并且
[0090]
ka是nx1(例如,4x1)的列向量。
[0091]
本发明不限于数量4和使用两个谐波分量。实际上,可以使用较高阶次和/或谐波来计算载荷估算值,而不损失计算的有效性。
[0092]
因此,轴向载荷估算的多项式函数不包括接触角,这提高了载荷估算方法的精度。
[0093]
通过类似的推理,可以基于应变参数和校准常数来计算径向载荷估算值。
[0094]
一般来说,使用表示接触角变化的接触角参数u
i
、v
i
、传感器位置β
i
和校准常数k来计算载荷估算值。接触角γ
i
不是直接计算的,而是根据应变信号隐式地估算的。
[0095]
由于所述方法,与已知方法相比,以较高的精度估算轴承载荷,如在图4上可以看出。
[0096]
由于载荷估算方法,信号分量用于使用于估算载荷的等式摆脱接触角的影响。
[0097]
因此,谐波分量用作接触角变化,以提高载荷估算的精度。
[0098]
图4示出了示出轴承载荷与滚动元件的接触角之间的关系的四个曲线g1、g2、g3、g4。
[0099]
曲线g1以粗实线示出了真实轴承载荷与轴承元件接触角之间的关系。
[0100]
曲线g2以细虚线示出了根据图3的方法估算的轴承载荷与轴承元件接触角之间的关系。
[0101]
曲线g3以粗虚线示出了根据使用峰到峰的方法估算的轴承载荷与轴承元件接触角之间的关系。
[0102]
曲线g4以细虚线示出了根据使用均方根的方法估算的轴承载荷与轴承元件接触角之间的关系。
[0103]
根据图4,可以看出,根据本发明的估算轴承载荷的方法特别接近实际轴承载荷。因此,根据本发明的轴承载荷估算方法消除了接触角变化的影响。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1