旋转角度检测方法及系统与流程
[0001]
本发明属于集成电路技术领域,涉及一种角度测量方法,尤其涉及一种旋转角度检测方法及系统。
背景技术:
[0002]
各向异性磁电阻效应(amr)是指铁磁材料的电阻率随自身磁化强度和电流方向夹角改变而变化的现象;其微观机制是基于自旋轨道耦合作用诱导的态密度及自旋相关散射的各向异性;这一点有别于其他依赖于自旋电子注入和检测的磁电阻效应(如gmr、tmr等)。
[0003]
基于amr各向异性磁阻的以上特性,amr各向异性磁阻被用来检测旋转角度的变化。然而,由于amr各向异性磁阻对磁场的南北极的感应相同,因此在用作角度检测的应用中只能实现0~180
°
的检测范围,而无法满足绝大多数0~360
°
的全范围角度检测的需求。
[0004]
有鉴于此,如今迫切需要设计一种新的角度检测方式,以便克服现有角度检测方式存在的上述至少部分缺陷。
技术实现要素:
[0005]
本发明提供一种旋转角度检测方法及系统,既可以充分利用amr各向异性磁阻来实现高分辨率精度,又能充分利用垂直霍尔来判断所处的角度区间,以实现0~360
°
的高分辨率精度角度检测。
[0006]
为解决上述技术问题,根据本发明的一个方面,采用如下技术方案:
[0007]
一种旋转角度检测方法,所述角度检测方法包括:
[0008]
amr各向异性磁阻器进行初始旋转角度检测;
[0009]
第一垂直霍尔传感器感应磁场在第一方向的分量(该方向平行于器件表面);
[0010]
第二垂直霍尔传感器感应磁场在第二方向的分量(该方向平行于器件表面);所述第二方向与第一方向垂直(且都平行于器件表面);
[0011]
结合所述amr各向异性磁阻器、第一垂直霍尔传感器及第二垂直霍尔传感器的输出结果,检测得到对应的旋转角度。
[0012]
作为本发明的一种实施方式,所述amr各向异性磁阻器获取角度为n
°
或(n+180)
°
;其中,0≤n<180;
[0013]
通过第一垂直霍尔传感器及第二垂直霍尔传感器的输出结果,将旋转角度确定在[0
°
~90
°
)、[90
°
~180
°
)、[180
°
~270
°
)、270
°
~360
°
)四个区间中的一个;
[0014]
根据角度所确定的区间,确定角度为n
°
还是(n+180)
°
;若旋转角度确定在[0
°
~90
°
)区间或[90
°
~180
°
)区间,则角度为n
°
;若旋转角度确定在[180
°
~270
°
)区间或270
°
~360
°
)区间,则角度为(n+180)
°
。
[0015]
作为本发明的一种实施方式,所述第一方向为x轴,所述第二方向为y轴。
[0016]
作为本发明的一种实施方式,所述第一垂直霍尔传感器的x轴的0
°
和amr磁阻电桥的0
°
位置重合,则:
[0017]
所述第一垂直霍尔传感器翻转,且第二垂直霍尔传感器翻转,则amr各向异性磁阻器检测到的旋转角度为[0
°
~90
°
);
[0018]
所述第一垂直霍尔传感器未翻转,且第二垂直霍尔传感器翻转,则amr各向异性磁阻器检测到的旋转角度为[90
°
~180
°
);
[0019]
所述第一垂直霍尔传感器未翻转,且第二垂直霍尔传感器未翻转,则amr各向异性磁阻器检测到的旋转角度为[180
°
~270
°
);
[0020]
所述第一垂直霍尔传感器翻转,且第二垂直霍尔传感器未翻转,则amr各向异性磁阻器检测到的旋转角度为[270
°
~360
°
)。
[0021]
根据本发明的另一个方面,采用如下技术方案:一种旋转角度检测系统,所述旋转角度检测系统包括:
[0022]
amr各向异性磁阻器,用以实现初始旋转角度检测;
[0023]
第一霍垂直尔传感器,用以感应磁场在第一方向的分量(该方向平行于器件表面);
[0024]
第二霍垂直尔传感器,用以感应磁场在第二方向的分量(该方向平行于器件表面);所述第二方向与第一方向垂直(且都平行于器件表面);
[0025]
角度检测单元,用以结合所述amr各向异性磁阻器、第一垂直霍尔传感器及第二垂直霍尔传感器的输出结果,检测得到对应的旋转角度。
[0026]
作为本发明的一种实施方式,所述amr各向异性磁阻器获取角度为n
°
或(n+180)
°
;其中,0≤n<180;
[0027]
通过第一垂直霍尔传感器及第二垂直霍尔传感器的输出结果,将旋转角度确定在[0
°
~90
°
)、[90
°
~180
°
)、[180
°
~270
°
)、270
°
~360
°
)四个区间中的一个;
[0028]
所述角度检测单元用以根据角度所确定的区间,确定角度为n
°
还是(n+180)
°
;若旋转角度确定在[0
°
~90
°
)区间或[90
°
~180
°
)区间,则角度为n
°
;若旋转角度确定在[180
°
~270
°
)区间或270
°
~360
°
)区间,则角度为(n+180)
°
。
[0029]
作为本发明的一种实施方式,所述第一垂直霍尔传感器与第二垂直霍尔传感器垂直设置。
[0030]
作为本发明的一种实施方式,所述第一垂直霍尔传感器及第二垂直霍尔传感器平行于设定器件的表面设置。
[0031]
作为本发明的一种实施方式,所述第一方向为x轴,所述第二方向为y轴;
[0032]
所述第一垂直霍尔传感器的x轴的0
°
和amr磁阻电桥的0
°
位置重合,则:
[0033]
所述第一垂直霍尔传感器翻转,且第二垂直霍尔传感器翻转,则amr各向异性磁阻器检测到的旋转角度为[0
°
~90
°
);
[0034]
所述第一垂直霍尔传感器未翻转,且第二垂直霍尔传感器翻转,则amr各向异性磁阻器检测到的旋转角度为[90
°
~180
°
);
[0035]
所述第一垂直霍尔传感器未翻转,且第二垂直霍尔传感器未翻转,则amr各向异性磁阻器检测到的旋转角度为[180
°
~270
°
);
[0036]
所述第一垂直霍尔传感器翻转,且第二垂直霍尔传感器未翻转,则amr各向异性磁阻器检测到的旋转角度为[270
°
~360
°
)。
[0037]
作为本发明的一种实施方式,所述amr各向异性磁阻器、第一垂直霍尔传感器及第
二垂直霍尔传感器设置于一芯片中。
[0038]
本发明的有益效果在于:本发明提出的旋转角度检测方法及系统,既可以充分利用amr各向异性磁阻来实现高分辨率精度,又能充分利用垂直霍尔来判断所处的角度区间,以实现0~360
°
的高分辨率精度角度检测。
附图说明
[0039]
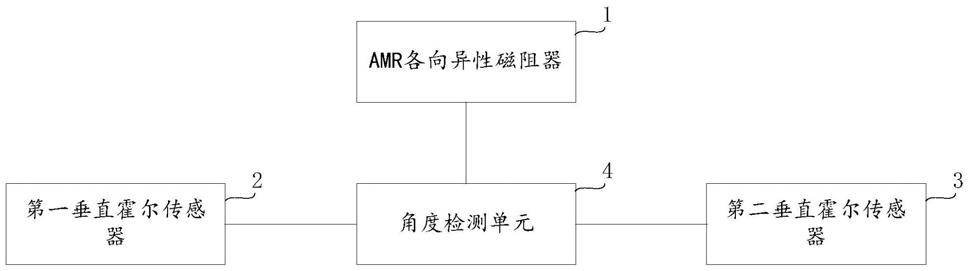
图1为本发明一实施例中旋转角度检测系统的组成示意图。
[0040]
图2为本发明一实施例中旋转角度检测方法的流程图。
[0041]
图3-1为本发明一实施例中旋转角度检测系统的使用示意图。
[0042]
图3-2为本发明一实施例中旋转角度检测系统的使用示意图。
[0043]
图4为本发明一实施例中amr各向异性磁阻进行角度检测的原理示意图。
[0044]
图5为本发明一实施例中二轴垂直霍尔、amr各向异性磁阻和磁体的示意图。
[0045]
图6为本发明一实施例中二轴垂直霍尔辅助amr实现判断所在角度区间示意图。
[0046]
图7为本发明一实施例中二轴垂直霍尔辅助amr实现0~360
°
检测示意图。
具体实施方式
[0047]
下面结合附图详细说明本发明的优选实施例。
[0048]
为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。
[0049]
该部分的描述只针对几个典型的实施例,本发明并不仅局限于实施例描述的范围。相同或相近的现有技术手段与实施例中的一些技术特征进行相互替换也在本发明描述和保护的范围内。
[0050]
本发明揭示一种旋转角度检测系统,图1为本发明一实施例中旋转角度检测系统的组成示意图;请参阅图1,所述旋转角度检测系统包括:amr各向异性磁阻器1、第一垂直霍尔传感器2、第二垂直霍尔传感器3及角度检测单元4(其中,第一垂直霍尔传感器2、第二垂直霍尔传感器3组成二轴垂直霍尔传感器20,如图6所示)。amr各向异性磁阻器1用以实现初始旋转角度检测;第一垂直霍尔传感器2用以感应磁场在第一方向的分量;第二垂直霍尔传感器3用以感应磁场在第二方向的分量;第一方向平行于器件表面,第二方向平行于器件表面,所述第二方向与第一方向垂直。角度检测单元4用以结合所述amr各向异性磁阻器1、第一垂直霍尔传感器2及第二垂直霍尔传感器3的输出结果,检测得到对应的旋转角度。
[0051]
在本发明的一实施例中,所述amr各向异性磁阻器获取角度为n
°
或(n+180)
°
;其中,0≤n<180。通过第一垂直霍尔传感器及第二垂直霍尔传感器的输出结果,将旋转角度确定在[0
°
~90
°
)、[90
°
~180
°
)、[180
°
~270
°
)、270
°
~360
°
)四个区间中的一个。所述角度检测单元用以根据角度所确定的区间,确定角度为n
°
还是(n+180)
°
;若旋转角度确定在[0
°
~90
°
)区间或[90
°
~180
°
)区间,则角度为n
°
;若旋转角度确定在[180
°
~270
°
)区间或270
°
~360
°
)区间,则角度为(n+180)
°
。
[0052]
在本发明的一实施例中,所述第一垂直霍尔传感器(也可以称为x轴垂直霍尔)2与第二垂直霍尔传感器(也可以称为y轴垂直霍尔)3垂直设置(可结合图6)。在一实施例中,所
述第一垂直霍尔传感器2及第二垂直霍尔传感器3平行于设定器件的表面设置。在本发明的一实施例中,所述第一方向为x轴,所述第二方向为y轴。
[0053]
假设某种摆放关系下垂直霍尔x轴的0
°
和amr磁阻电桥的0
°
位置重合,那么请参阅表1所示。
[0054]
amr磁阻计算得到的角度θ第一霍尔传感器第二霍尔传感器在0~90
°
区间翻转翻转在90~180
°
区间未翻转翻转在180~270
°
区间未翻转未翻转在270~360
°
区间翻转未翻转
[0055]
表1角度与第一霍尔传感器及第二霍尔传感器的关系表
[0056]
从表1可以看到,所述第一垂直霍尔传感器翻转,且第二垂直霍尔传感器翻转,则amr各向异性磁阻器检测到的旋转角度为[0
°
~90
°
);所述第一垂直霍尔传感器未翻转,且第二垂直霍尔传感器翻转,则amr各向异性磁阻器检测到的旋转角度为[90
°
~180
°
);所述第一垂直霍尔传感器未翻转,且第二垂直霍尔传感器未翻转,则amr各向异性磁阻器检测到的旋转角度为[180
°
~270
°
);所述第一垂直霍尔传感器翻转,且第二垂直霍尔传感器未翻转,则amr各向异性磁阻器检测到的旋转角度为[270
°
~360
°
)。
[0057]
在本发明的一实施例中,所述amr各向异性磁阻器、第一垂直霍尔传感器及第二垂直霍尔传感器可以设置于一芯片中。当然,amr和垂直霍尔的组合形式可以是多样的,包括:将垂直霍尔和amr集成在一颗芯片中;将垂直霍尔和信号处理电路集成在一颗芯片中;将垂直霍尔和amr封装在一个封装体中;将垂直霍尔器件和amr器件靠近摆放等多种形式。二轴垂直霍尔传感器与amr各向异性磁阻器1的设置方式也可以有多种方式,如图3-1、图3-2、图5中的设置方式。
[0058]
amr各向异性磁阻实现角度检测的原理如图4所示,一般由两路成45
°
摆放的amr磁阻电桥对组成,随着平行于amr磁阻电桥表面的外加磁场的旋转,电桥输出随旋转角度θ变化的sin(2θ)和cos(2θ)的电压信号,通过计算(比如通过专用的asic电路或者mcu进行计算)可以得到θ的数值。由图4可以看到,amr各向异性磁阻电桥输出在0~180
°
区间和180
°
~360
°
区间是完全一样的,因此amr各向异性磁阻在用作角度检测的时候,实际只能分辨最大180
°
的角度区间。
[0059]
图5揭示了磁体在轴端摆放及侧面摆放时本发明旋转角度检测方法的检测示意图,请参阅图5,磁体30可以旋转轴31旋转;垂直霍尔器件和amr各向异性磁阻器件可设置于磁体30的一侧,也可以设置于磁体30的一端。垂直霍尔器件和amr各向异性磁阻器件一样,都能感应平行于器件表面的磁场变化。因此利用互成90
°
的两路(平行于器件表面的xy平面内)垂直霍尔,就可以辅助amr各向异性磁阻电桥实现0~360
°
的角度检测,如图5所示,磁体可以摆放在z轴上,也可以摆放在侧面。注意:此处各向异性磁阻amr和垂直霍尔vhs均感测平行于xy平面的磁场分量。
[0060]
x轴垂直霍尔感应平行于器件表面(图5中xy平面)的磁场在x轴的分量;y轴垂直霍尔感应平行与器件表面(图5中xy平面)的磁场在y轴的分量;如图6所示,二轴垂直霍尔传感器20在0~360
°
区间内,可以辅助判断0
°
~90
°
,90
°
~180
°
,180
°
~270
°
,270
°
~360
°
四个区间。
[0061]
本发明进一步揭示了一种旋转角度检测方法,图2为本发明一实施例中旋转角度检测方法的流程图;请参阅图2,所述角度检测方法包括:
[0062]
步骤s1、amr各向异性磁阻器进行初始旋转角度检测;
[0063]
步骤s2、第一垂直霍尔传感器感应磁场在第一方向的分量;第一方向平行于器件表面;
[0064]
步骤s3、第二垂直霍尔传感器感应磁场在第二方向的分量;第二方向平行于器件表面,所述第二方向与第一方向垂直;
[0065]
步骤s4、结合所述amr各向异性磁阻器、第一垂直霍尔传感器及第二垂直霍尔传感器的输出结果,检测得到对应的旋转角度,可参阅图7。
[0066]
在一实施例中,所述第一方向为x轴,所述第二方向为y轴。
[0067]
在本发明的一实施例中,所述amr各向异性磁阻器获取角度为n
°
或(n+180)
°
;其中,0≤n<180;通过第一垂直霍尔传感器及第二垂直霍尔传感器的输出结果,将旋转角度确定在[0
°
~90
°
)、[90
°
~180
°
)、[180
°
~270
°
)、270
°
~360
°
)四个区间中的一个。根据角度所确定的区间,确定角度为n
°
还是(n+180)
°
;若旋转角度确定在[0
°
~90
°
)区间或[90
°
~180
°
)区间,则角度为n
°
;若旋转角度确定在[180
°
~270
°
)区间或270
°
~360
°
)区间,则角度为(n+180)
°
。
[0068]
在本发明的一实施例中,假设某种摆放关系下垂直霍尔x轴的0
°
和amr磁阻电桥的0
°
位置重合,请参阅表1所示:所述第一垂直霍尔传感器翻转,且第二垂直霍尔传感器翻转,则amr各向异性磁阻器检测到的旋转角度为[0
°
~90
°
);所述第一垂直霍尔传感器未翻转,且第二垂直霍尔传感器翻转,则amr各向异性磁阻器检测到的旋转角度为[90
°
~180
°
);所述第一垂直霍尔传感器未翻转,且第二垂直霍尔传感器未翻转,则amr各向异性磁阻器检测到的旋转角度为[180
°
~270
°
);所述第一垂直霍尔传感器翻转,且第二垂直霍尔传感器未翻转,则amr各向异性磁阻器检测到的旋转角度为[270
°
~360
°
)。
[0069]
综上所述,本发明提出的旋转角度检测方法及系统,既可以充分利用amr各向异性磁阻来实现高分辨率精度,又能充分利用垂直霍尔来判断所处的角度区间,以实现0~360
°
的高分辨率精度角度检测。
[0070]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0071]
这里本发明的描述和应用是说明性的,并非想将本发明的范围限制在上述实施例中。实施例中所涉及的效果或优点可因多种因素干扰而可能不能在实施例中体现,对于效果或优点的描述不用于对实施例进行限制。这里所披露的实施例的变形和改变是可能的,对于那些本领域的普通技术人员来说实施例的替换和等效的各种部件是公知的。本领域技术人员应该清楚的是,在不脱离本发明的精神或本质特征的情况下,本发明可以以其它形式、结构、布置、比例,以及用其它组件、材料和部件来实现。在不脱离本发明范围和精神的情况下,可以对这里所披露的实施例进行其它变形和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1