一种车道定位的装置及匹配方法与流程
1.本发明涉及定位导航设备及应用方法技术领域,特别是一种车道定位的装置及匹配方法。
背景技术:
2.车辆行驶时,车道级定位是每个定位模块厂商希望达到的目标,能实现车辆的高精定位及导航。目前应用广泛的车道级定位技术一般采用高精定位+惯性导航,但是由于用于高精度的惯性导航元件的价格通常在万元以上,与消费电子类的惯性器件价格相差太远,并不能广泛应用于大众定位领域,因此还存在较大局限性。
技术实现要素:
3.为了克服现有车道级定位系统因技术所限存在的成本高,不能有效推广的弊端,本发明提供了成本低、易于推广,应用中,在相关模块及单元等共同的作用下,能实时采集车辆上车道匹配工具在执行车道匹配动作过程中的相关数据,并选取符合所述条件的车道数据,结合所选取的定位数据及与之关联的时间数据及定位数据来确定车道匹配后的位置信息,从而车辆能得到车道级定位的一种车道定位的装置及匹配方法。
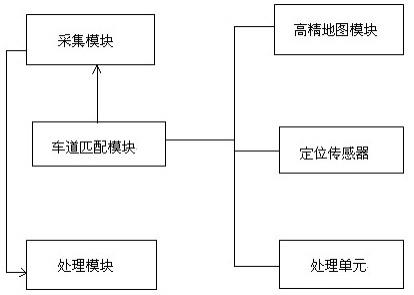
4.本发明解决其技术问题所采用的技术方案是:一种车道定位的装置,其特征在于包括采集模块、处理模块及车道匹配模块,车道匹配模块包括定位传感器、高精地图模块、处理单元;采集模块、处理模块及车道匹配模块的定位传感器、高精地图模块、处理单元是安装在车辆上的硬件模块;所述定位传感器应用中用于采集车辆的定位数据,高精地图模块应用中用于采集车辆高精地图数据,处理单元应用中主要起到连接定位传感器及高精地图模块的作用;所述采集模块用于采集车道匹配模块在执行车道匹配动作过程中的相关数据;所述处理模块用于以包含最近车道为存在的条件、来选取符合所述条件的车道数据,以及结合所选取的定位数据及与之关联的时间数据及高精地图数据来确定车道匹配后的位置信息。
5.进一步地,所述车道匹配模块在执行车道匹配动作过程中的相关数据信息,包括定位数据的接收时刻数据。
6.进一步地,所述高精地图模块应用中采集的车辆高精地图数据,包括车道中心线的坐标经纬度信息,车道的方向信息。
7.一种车道定位装置的匹配方法,其特征在于包括如下步骤,步骤一:经采集模块采集车辆行驶过程中的相关数据,相关数据包括时间数据、及关联于所述时间数据的定位数据和高精地图数据;步骤二:以包含最近车道为存在事件发生的条件,来选取符合所述条件的车道数据;步骤三:经处理模块结合所选取的车道数据及与之关联的时间数据及定位数据来确定车道匹配后的位置信息。
8.本发明有益效果是:本发明成本低、易于推广,应用中,在相关模块及单元等共同的作用下,能实时采集车辆上车道匹配工具在执行车道匹配动作过程中的相关数据,并选
取符合所述条件的车道数据,结合所选取的定位数据及与之关联的时间数据及定位数据来确定车道匹配后的位置信息,从而车辆能得到车道级定位;克服现有车道级定位系统因技术所限存在的成本高,不能有效推广的弊端。基于上述,本发明具有好的应用前景。
附图说明
9.以下结合附图和实施例将本发明做进一步说明。
10.图1是本发明架构框图示意。
具体实施方式
11.图1中所示,一种车道定位的装置,包括采集模块、处理模块及车道匹配模块,车道匹配模块包括定位传感器、高精地图模块、处理单元;采集模块、处理模块及车道匹配模块的定位传感器,高精地图模块、处理单元是安装在车辆上的硬件模块;所述定位传感器应用中用于采集车辆基于gps的定位数据,高精地图模块应用中用于采集车辆基于gps高精地图数据,处理单元应用中主要起到连接定位传感器及高精地图模块的作用;所述采集模块用于采集车道匹配模块在执行车道匹配动作过程(汽车在行驶过程中,由于定位误差,定位点并不一定会在车道线上,车道匹配的过程就是将带有误差的定位点校正到车道中心线上,计算过程在下面的数学公式中有:lon = (b*b* lon-k
ꢀ–ꢀ
a*b*lat-k
–
a*c)/(a*a+b*b)lat = (a*a* lat-k
ꢀ–ꢀ
a*b*lon-k
–
b*c)/(a*a+b*b))中的相关数据;所述处理模块用于以包含最近车道为存在的条件,来选取符合所述条件的车道数据,以及结合所选取的定位数据及与之关联的时间数据及高精地图数据来确定车道匹配后的位置信息。车道匹配模块在执行车道匹配动作过程中的相关数据信息包括:定位数据的接收时刻数据。高精地图模块应用中采集的车辆高精地图数据包括:车道中心线的坐标经纬度信息,车道的方向信息。
12.图1中所示,一种车道定位装置的匹配方法,包括三个步骤,步骤一:经采集模块采集车道匹配工具在执行车道匹配过程中的相关数据,相关数据包括时间数据及关联于所述时间数据的定位数据和高精地图数据。步骤一中,时间数据可以是计时所得,能按时刻来记录,例如0.01秒,0.02秒,0.03秒等;定位数据是车辆经纬度信息,航向信息。高精地图数据包括车道中心线的坐标经纬度信息,车道的方向信息。在进行计时的情况下采集到的定位数据和高精地图数据,均可与计时得到的时间数据相关联,例如下表所示。
13.表1展示车辆运动数据与时间数据的关联关系
时刻经度纬度行驶方向车道1中心线经度车道1中心线纬度车道1方向车道n中心线经度车道n中心线纬度车道n方向时刻1lon-1lat-1dir-1lon1-1lat1-1dir1-1lonn-1latn-1dirn-1时刻2lon-2lat-2dir-2lon1-2lat1-2dir1-2lonn-2latn-2dirn-2
…………………………
时刻nlon-nlat-ndir-nlon1-nlat1-ndir1-nlon12-nlatn-2dirn-n
从表中可知,通过时间数据作为索引,即可确定对应的定位数据及高精地图数据。
14.图1中所示,一种车道定位装置的匹配方法,步骤二:经处理模块以包含最近车道存在的条件,来选取符合所述条件的车道数据。具体的处理模块首先计算距离每条车道的垂直距离:从时刻k开始,以上一时刻车道中心线位置为原点,建立车道中心线的直线方程:x = (lon-k-k
ꢀ–ꢀ
lon-k-k-1) * r * cos(lat-k-k-1)y = (lat-k-k
ꢀ–ꢀ
lat-k-k-1) * r其中r为地球半径6371km,lon-k-k为第k时刻的车道k中心线经度,lat-k-k为第k
时刻的车道k中心线纬度,lon-k-k-1为第k-1时刻的车道k中心线经度,lat-k-k-1为第k-1时刻的车道k中心线纬度;进一步可得车道中心线的直线方程为:a = yb =
ꢀ‑
xc = 0其中a、 b、c分别为直线方程ax+by+c=0的参数。
15.可得点到车道中心线的垂直距离:d-n = |a*lon-k+b*lat-k+c|/√(a*a+b*b)然后根据垂直距离从小到大进行排列,选出最近的两条车道线。
16.图1中所示,一种车道定位的装置及匹配方法,步骤三:处理模块结处理合所选取的车道数据及与之关联的时间数据及定位数据来确定车道匹配后的位置信息,进而得到车道级定位精度。具体的,步骤二中已经挑选出了最近的两条车道,此时根据车道的方向与行驶方向挑选最接近的车道进行车道匹配,公式如下:anglediff = |dir-k
ꢀ–ꢀ
dirn-k|其中dir-k为k时刻行驶方向,dirn-k为第k条车道的方向。根据anglediff的大小,挑选出最小者作为车道匹配的车道。根据s102中的车道中心线的直线方程,可以得到当前位置到车道中心线的垂足坐标:lon = (b*b* lon-k
ꢀ–ꢀ
a*b*lat-k
–
a*c)/(a*a+b*b)lat = (a*a* lat-k
ꢀ–ꢀ
a*b*lon-k
–
b*c)/(a*a+b*b)那么lon, lat即为车道匹配完成后的位置,并输出到车辆的定位系统实现车道级的精确定位。
17.图1所示,本发明成本低、易于推广,应用中,在相关模块及单元等共同的作用下,能实时采集车辆上车道匹配工具在执行车道匹配动作过程中的相关数据,并选取符合所述条件的车道数据,结合所选取的定位数据及与之关联的时间数据及定位数据来确定车道匹配后的位置信息,从而车辆能得到车道级定位;克服现有车道级定位系统因技术所限存在的成本高,不能有效推广的弊端。
18.以上显示和描述了本发明的基本原理和主要特征及本发明的优点,对于本领域技术人员而言,显然本本发明限于上述示范性实施例的细节,而且在不背离本本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
19.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1