一种滚笼式仿地形传感器
1.本实用新型涉及农业机械技术领域,尤其涉及一种滚笼式仿地形传感器。
背景技术:
2.目前测量地形的传感器可以分为接触式和非接触式。其中,非接触式的传感器有超声波传感器和红外传感器。超声波传感器在草地里不会受到影响,但是在有些植物茬地里,植物茬的表面能够直接对超声波进行反射,因此在数据收集方面还需要确定植物茬的顶部与地面的距离,同时,周围温度以及不平整的地面都可能对超声波传感器产生影响;对于红外传感器而言,工作过程中容易受到水分的影响,因为水表面能够对红外光进行反射和折射,从而影响到传感器的测量精度。对于接触式传感器,叙利亚阿勒顿大学的a.m mouazenl;j.anthonis2;w.saeya提出过一种测量农具框架与地面高度的摆臂式耕深传感器,该传感器主要由一个金属轮和一个0.2米行程长度的线性可变位移传感器组成,线性位移传感器与金属轮的轮轴连接,该摆臂式耕深传感器依靠较重的金属轮降低植物茬对传感器的影响,但存在以下问题:因为金属轮的重量影响,当在较软的土壤里行走时,摆臂式耕深传感器存在下陷问题,同样会影响地形的测量精度。
技术实现要素:
3.本实用新型的目的在于提供一种滚笼式仿地形传感器,用以在地形测量过程中降低植物茬的影响,提高地形测量精度。
4.为了解决上述问题,本实用新型采用以下技术方案:
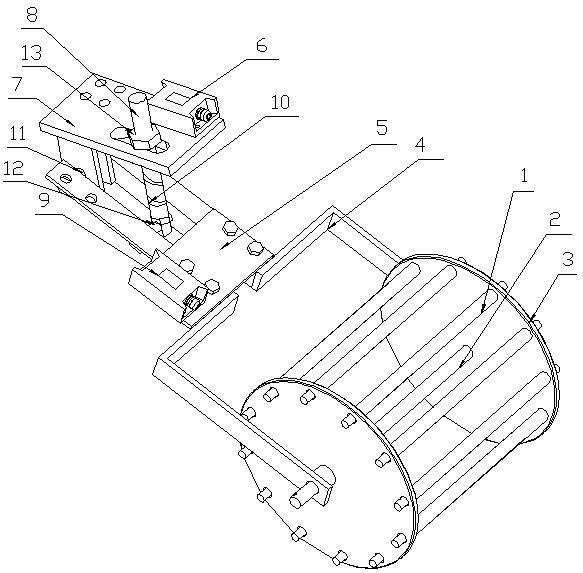
5.一种滚笼式仿地形传感器包括倾角传感器组、牵引板、摆臂框架和滚笼,牵引板与车辆机体可拆卸固定连接,摆臂框架的一端与牵引板铰接,摆臂框架的另一端与滚笼转动连接,倾角传感器组包括用于测量车辆俯仰角度的倾角传感器a和用于测量摆臂框架倾斜角度的倾角传感器b,倾角传感器a固定安装在牵引板上,倾角传感器b固定安装在摆臂框架上;所述滚笼包括中心轴、两个圆盘和多根滚轴,中心轴转动连接在摆臂框架上,两个圆盘分别固定在中心轴的两端,各滚轴沿圆盘的圆周方向均布在两个圆盘之间。
6.可选地,还包括用于避免滚笼脱离地面的复位机构,复位机构设置在牵引板和摆臂框架之间。
7.可选地,复位机构包括限位螺栓、压缩弹簧和第二销轴,牵引板上开设有长圆孔,限位螺栓的一端通过第二销轴与摆臂框架铰接,限位螺栓的另一端穿出长圆孔并螺接有限位螺母,压缩弹簧套设于限位螺栓上并连接在牵引板和第二销轴之间。
8.可选地,所述摆臂框架整体呈凸字型结构,较窄的一端与牵引板铰接,较宽的一端与中心轴转动连接。
9.可选地,摆臂框架的一端通过第一销轴与牵引板铰接;摆臂框架上通过螺栓可拆卸地固定连接有连接板,倾角传感器b固定安装在连接板上,滚轴的两端可拆卸地固定在圆盘上。
10.可选地,倾角传感器a和倾角传感器b均输出与水平面的倾斜角度。
11.可选地,倾角传感器a和倾角传感器b均内置可用于数据计算和can总线输出的cpu芯片。
12.可选地,倾角传感器b中设置有滤波算法。
13.采用上述技术方案,本实用新型具有以下优点:
14.本实用新型能够利用倾角传感器b和倾角传感器a的差值反映地形的变化;通过调整本实用新型中滚轴的粗细、滚轴的数量、滚笼圆盘的大小以及倾角传感器b中的滤波算法,能够一定程度上过滤掉植物茬的影响,从而提高地形测量精度。倾角传感器b根据与倾角传感器a的差值变化,经滤波后可实时输出地形变化。
15.本实用新型同时采用两个倾角传感器a和倾角传感器b检测地形变化,使本实用新型从结构上属于非接触式检测,其整体可以采用固定安装,具有防护等级高、安装简单、可靠性高的特点,保证了滚笼式仿地形传感器的使用寿命。
附图说明
16.图1是本实用新型的立体结构示意图;
17.图2是本实用新型的主视图;
18.图3是本实用新型中摆臂框架的连接示意图。
19.附图标记:1、滚轴;2、中心轴;3、圆盘;4、摆臂框架;5、连接板;6、倾角传感器a;7、牵引板;8、限位螺栓;9、倾角传感器b;10、压缩弹簧,11、第一销轴,12、第二销轴,13、限位螺母。
具体实施方式
20.为了使本实用新型的技术目的、技术方案和有益效果更加清楚,下面结合附图1
‑
3和具体实施例对本实用新型的技术方案做出进一步的说明。
21.一种滚笼式仿地形传感器的实施例:
22.一种滚笼式仿地形传感器包括倾角传感器组、牵引板7、摆臂框架4和滚笼,牵引板7与车辆机体通过螺栓可拆卸固定连接,摆臂框架4的一端通过第一销轴11与牵引板7铰接,摆臂框架4的另一端与滚笼转动连接,倾角传感器组包括用于测量车辆俯仰角度的倾角传感器a6和用于测量摆臂框架4倾斜角度的倾角传感器b9,倾角传感器a6固定安装在牵引板7上,倾角传感器b9固定安装在摆臂框架4上;所述滚笼包括中心轴2、两个圆盘3和多根滚轴1,中心轴2的两端转动连接在摆臂框架4上,两个圆盘3分别固定在中心轴2的两端,各滚轴1沿圆盘3的圆周方向均布在两个圆盘3之间。
23.中心轴2作为旋转轴位于滚笼的中心位置,整个滚笼绕中心轴2转动,设置在两圆盘3之间的滚轴1,其数量可以增减。通过调整滚轴1数量、滚轴1粗细和圆盘3直径大小,可以调整各滚轴1之间的间隙,以提高通过植物茬的概率,减少植物茬的影响。
24.进一步地,倾角传感器b9中设置有滤波算法,可以进一步实时地过滤掉植物茬的影响。
25.进一步地,本实用新型还包括用于避免滚笼脱离地面的复位机构,复位机构设置在牵引板7和摆臂框架4之间。
26.进一步地,复位机构包括限位螺栓8、压缩弹簧10和第二销轴12,牵引板7上开设有长圆孔,限位螺栓8的一端通过第二销轴12与摆臂框架4铰接,限位螺栓8的另一端穿出长圆孔并螺接有限位螺母13,压缩弹簧10套设于限位螺栓8上并连接在牵引板7和第二销轴12之间。
27.复位机构中的限位螺母13可避免限位螺栓8脱出牵引板7的长圆孔,压缩弹簧10可在滚笼有向上脱离地面的趋势时给滚笼向下压紧地面的力,使滚笼始终压紧地面。
28.进一步地,所述摆臂框架4整体呈凸字型结构,较窄的一端与牵引板7铰接,较宽的一端与中心轴2转动连接。
29.进一步地,摆臂框架4的一端通过第一销轴11与牵引板7铰接,具体地,牵引板7上固定有竖板,竖板与第一销轴11转动连接;摆臂框架4上通过螺栓可拆卸地固定连接有连接板5,倾角传感器b9固定安装在连接板5上,滚轴1的两端可拆卸地固定在圆盘3上,如在滚轴1两端设置螺纹段,在螺纹段处螺接固定螺母。本实用新型的整体框架采用可拆卸结构,方便拆卸、安装。
30.进一步地,倾角传感器a6和倾角传感器b9均输出与水平面的倾斜角度。
31.进一步地,倾角传感器a6和倾角传感器b9均内置可用于数据计算和can总线输出的cpu芯片。其中设置倾角传感器a6为从节点,倾角传感器b9为主节点,倾角传感器b9接受到倾角传感器a6的倾斜角度数据实时地做差值计算。当滚笼随地形上下波动时,带动摆臂框架4绕第一销轴11摆动,摆动角度为与水平面的倾斜角度,该摆动角度减去牵引板7的倾斜角度值能够反映地形的变化。
32.上述实施例并非对本实用新型的形状、材料、结构等作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本实用新型技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1