无人机探测定位方法
1.本发明涉及探测定位技术领域,尤其涉及一种无人机探测定位方法。
背景技术:
2.近年来,常有报到无人机在机场附近飞行造成飞机无法正点飞行。随着无人机技术的发展,无人机越来越普及,且由于现在技术的越发成熟,无人机已经向着小型化、微型化的发展,微型无人机体积小、操作简单、飞行高度低、地物遮挡多,使得无人机在禁止飞行的场所飞行不易被发现,且加上大雾天气,对无人机的探测更加困难,防范处理无人机的干扰和破坏,已经成为边境、危险场所、军事要地和重大安保活动现场的世界性的难题,具体表现为难管控、难侦测、难处置。目前针对无人机的探测有人工观测、接收器探测、无线电探测和图像检测等。人工观测的方式是靠人的视力和听力去感知判断,正常情况下,人的听力在500
‑
800米,能见度为0.25平方米的天气,人的对于空中的物体的视力为2
‑
3公里,况且人的精力有限,专注时长有限,人的主观意志容易受天气的影响,不能满足一天24小时的监测,使得人工观测判定的准确性不稳定,人工成本也较高。接收器探测是通过阵列的接收器接受无人机的回波信息,获取无人机的速度、位置等特征信息来识别无人机,单接收器的阵列大小对无人机的探测精准度有一定的影响。尤其是在以无人机去探测无人机时。由于无人机自身的大小,使得在无人机上阵列空间较小的情况下,会影响无人机的探测精度,且对于体积较小、低噪声的无人机探测较为困难。无线电探测是使用频率来识别无人机,但对于不发射无线电信号的无人机则难以进行探测,图像探测是通过摄像头采集无人机的图像数据进行特征提取来进行无人机的探测识别,该方法对处于大雾天气或晚上黑夜的微型的无人机来说探测较为困难,且对硬件的算力要求较高。
技术实现要素:
3.针对上述现有技术中的不足,本发明提供一种无人机探测定位方法,具有判定精度高,能在大雾天气使用、成本低、算力小的特点。
4.为了实现上述目的,本发明提供一种无人机探测定位方法,包括步骤:
5.s1:设置一声波接收器阵列并建立一空间坐标系,所述声波接收器阵列包括多个声波接收器;
6.s2:利用所述声波接收器阵列采集一目标物体的声波信号数据;
7.s3:根据所述声波信号数据计算每个所述声波接收器的接收信号的时延,根据所述时延确定所述目标物体在所述空间坐标系内的坐标;
8.s4:根据所述时延判断所述目标物体相对于所述声波接收器阵列的飞行方向;
9.s5:对所述声波信号数据进行特征提取,并判断所述目标物体是否为无人机,获得一第一判定结果;
10.s6:启动摄像头对准所述飞行方向采集所述目标物体的图像;
11.s7:对所述图像进行图像预处理和图像压缩,并通过图像识别判断所述目标物体
是否为无人机,获得一第二判定结果;
12.s8:结合所述第一判定结果和所述第二判定结果,最终判定所述目标物体是否为无人机,获得最终判定结果;
13.s9:当所述最终判定结果表示所述目标物体为无人机时,根据所述声波信号数据的声波频率变化判定所述无人机的状态,所述状态包括悬停、靠近和远离。
14.优选地,所述声波接收器阵列包括五个所述声波接收器,一所述声波接收器位于中心位置,其余四个所述声波接收器围绕位于中心位置的所述声波接收器对称布置并形成一长方形;所述空间坐标系以所述中心位置作为坐标中心。
15.优选地,所述s3步骤中,利用所述空间坐标系建立所述目标物体的坐标和所述声波接收器两两接收到所述声波信号数据的时延τ之间的方程式;利用互广义相关算法计算出所述时延τ,将时延τ代入所述方程式计算出所述目标物体在所述空间坐标系内的坐标。
16.优选地,所述s4步骤中,通过比较所述时延的正负,判断所述目标物体相对于所述声波接收器阵列的飞行方向。
17.优选地,所述s5步骤中,利用梅尔倒谱系数法对所述声波信号数据进行特征提取;并利用bp神经网络输出所述声波信号数据是否为无人机的噪声的判定结果;所述bp神经网络的激活函数采用sigmoid函数;根据所述判定结果判断所述目标物体是否为无人机,获得所述第一判定结果。
18.优选地,所述s7步骤中,利用ffa
‑
net去雾新网络算法对图像进行图像预处理;将图像预处理后的所述图片运用奇异值分解进行图像压缩;利用faster r
‑
cnn算法对压缩后的所述图像进行图像识别判断所述目标物体是否为无人机,获得所述第二判定结果。
19.优选地,还包括步骤:当所述第一判定结果和所述第二判定结果之一判断所述目标物体为无人机时,发出预警信号。
20.优选地,所述s9步骤中,根据多普勒效应,当所述声波频率变化在一阈值范围内时,判断所述无人机的所述状态为悬停;当所述声波频率超出所述阈值范围且变大时,判断所述无人机接近所述声波接收器,所述状态为靠近;当所述声波频率超出所述阈值范围且变小时,判断所述无人机远离所述声波接收器,所述状态为远离。
21.本发明由于采用了以上技术方案,使其具有以下有益效果:
22.用较低的成本做到对无人机的实时检测,价格能够让用户轻松的负担,即便无人值守,也可以对无人机进行探测,在检测到无人机目标时,用户能够得到无人机存在的预警信号,便于对违禁的无人机进行反制。防止无人机的违禁飞行带来的潜在危险,减少伤亡事故。
23.采用声波传感器和视觉传感器融合探测的方式,避免单一的传感器探测精准度不高的局限性,比如单一的声波传感器会受到距离影响使得检测到的信号较小,视觉传感器会受到光线的影响。利用贝叶斯概率,融合二者的优势可提高无人机探测的精准度。
24.采用声波探测无人机的方向后再旋转摄像头到无人机的方向进行图像采集,避免摄像头对全方位的探测带来的存储数据量大的问题,同时,对采集的图像进行奇异值分解,减少了硬件的算力。
附图说明
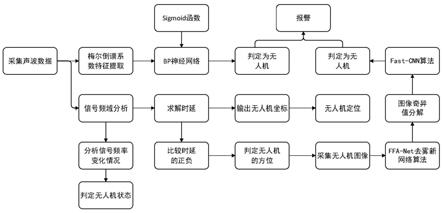
25.图1为本发明实施例的无人机探测定位方法的流程图。
具体实施方式
26.下面根据附图1,给出本发明的较佳实施例,并予以详细描述,使能更好地理解本发明的功能、特点。
27.请参阅图1,本发明实施例的一种无人机探测定位方法,包括步骤:
28.s1:设置一声波接收器阵列并建立一空间坐标系,声波接收器阵列包括多个声波接收器;
29.s2:利用声波接收器阵列采集一目标物体的声波信号数据;
30.s3:根据声波信号数据计算每个声波接收器的接收信号的时延,根据时延确定目标物体在空间坐标系内的坐标;
31.s4:根据时延判断目标物体相对于声波接收器阵列的飞行方向;
32.s5:对声波信号数据进行特征提取,并判断目标物体是否为无人机,获得一第一判定结果;
33.s6:启动摄像头对准飞行方向采集目标物体的图像;
34.s7:对图像进行图像预处理和图像压缩,并通过图像识别判断目标物体是否为无人机,获得一第二判定结果;
35.s8:结合第一判定结果和第二判定结果,最终判定目标物体是否为无人机,获得最终判定结果;
36.s9:当最终判定结果表示目标物体为无人机时,根据声波信号数据的声波频率变化判定无人机的状态,状态包括悬停、靠近和远离。
37.声波接收器阵列为五元阵列包括五个声波接收器,一声波接收器位于中心位置,其余四个声波接收器围绕位于中心位置的声波接收器对称布置并形成一长方形;空间坐标系以中心位置作为坐标中心。
38.s3步骤中,利用空间坐标系建立目标物体的坐标和声波接收器两两接收到声波信号数据的时延τ之间的方程式;利用互广义相关算法计算出时延τ,将时延τ代入方程式计算出目标物体在空间坐标系内的坐标。
39.s4步骤中,通过比较时延的正负,判断目标物体相对于声波接收器阵列的飞行方向。
40.s5步骤中,利用梅尔倒谱系数法对声波信号数据进行特征提取,可以分类出无人机、自然噪声、汽车噪声;并利用bp神经网络输出声波信号数据是否为无人机的噪声的判定结果;bp神经网络的激活函数采用sigmoid函数;根据判定结果判断目标物体是否为无人机,获得第一判定结果。
41.s7步骤中,利用ffa
‑
net去雾新网络算法对图像进行图像预处理;将图像预处理后的图片运用奇异值分解进行图像压缩;利用faster r
‑
cnn算法对压缩后的图像进行图像识别判断目标物体是否为无人机,获得第二判定结果。
42.还包括步骤:当第一判定结果和第二判定结果之一判断目标物体为无人机时,发出预警信号。
43.s9步骤中,根据多普勒效应,当声波频率变化在一阈值范围内时,判断无人机的状态为悬停;当声波频率超出阈值范围且变大时,判断无人机接近声波接收器,状态为靠近;当声波频率超出阈值范围且变小时,判断无人机远离声波接收器,状态为远离。
44.例如:无人机的声波传达到第一声波接收器、第二声波接收器、第三声波接收器、第四声波接收器、第五声波接收器所用的时间依次为t1、t2、t3、t4、t5。两个声波接收器之间的时延为τ
ij
=t
i
‑
t
j
且t
i
>t
j
,τ
ij
可以根据第i声波接收器和第j声波接收器所接收的声波信号的频域互相关函数计算得出。在计算无人机的坐标之前,需要对τ
1j
,j=2,3,4,5进行计算,找出其中最小的两个,如果时延最小的两个为邻居,那么就直接判断无人机处于哪一个象限,以判断无人机处于哪一个坐标系中,也就能判断无人机相对于坐标的方向,比如τ
14
和τ
15
是最小的两个时延数据,那么无人机就在第一个象限内,如果不相邻的时延相等,则可以再判断相等的时之间的时延数据大小,比如τ
12
和τ
14
最小,且两个数据相等,则可再看τ3和τ5的大小,如果τ3>τ5,那么无人机处于y轴的正方向,反之则处于y轴的负方向,无人机处于坐标轴上的坐标容易计算,在此计算无人机处于第一象限的坐标值,第四声波接收器和第五声波接收器的坐标值(x4,y4,z4)和(x5,y5,z5)为已知数据,假设无人机的坐标值为(x,,y,z)。则可以得出以下的方程。
[0045][0046]
其中τ
14
、τ
15
、τ
45
可以由第一声波接收器和第四声波接收器,第一声波接收器和第五声波接收器,第四声波接收器和第五声波接收器采集的数据的广义互相关函数求得,v是空气的声音传播速度。
[0047]
根据多普勒效应,声源靠近声波接收器时,声波接收器接收到的信号频率越大越大,无人机在远离声波接收器时,声波接收器接收到的信号频率越来越小,如果无人机处于悬停状态,那么声波接收器接收到的频率变化不大。所以根据分析第一声波接收器接收到的信号的时域波形,并提取波形的波峰,如果波峰与波峰之间距离越来小,则表示频率越来越大,表示无人机正在靠近。反之则远离。
[0048]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1