基于事件触发的交通智能体系统固定时间二分一致性方法
1.本发明涉及一种事件触发的多智能体系统固定时间二分一致性的控制方法,属于智能控制领域。
背景技术:
2.近年来,多智能体系统因其在多个领域的广泛应用吸引了众多学者的关注。一致性问题作为多智能体系统协同控制的基础问题,已经成为控制领域目前的研究热点之一。多智能体系统的一致性可以为移动机器人系统、飞行器群体、军事应用的战术编队、调控和交通系统的控制等实际应用提供理论指导。
3.王和,虞文武,温广辉等学者针对具有符号的有向图提出了固定时间一致性控制方法,其中控制协议设计为:
[0004][0005]
但是该控制方法需要控制器连续控制,工业应用中不利于控制器长时间连续作业,且会造成不必要的多智能体系统能量浪费。
[0006]
刘剑,余瑶,孙佳等学者针对带领导者的有向图提出了基于事件触发的固定时间一致性方法,其中控制协议设计如下:
[0007][0008]
但是这种方法并没有考虑无领导情况的多智能体系统,也没有考虑智能体之间符号的关系。工业应用中,该控制方法无法处理无领导者的多智能体系统一致性,且没有考虑智能体之间的信息对抗干扰等情况。
[0009]
传统的多智能体一致性控制方法主要讨论的是多智能体系统的渐近一致性问题,即智能体的状态在时间趋于无穷时趋于一致。在工程应用中,这样的收敛时长并不能满足实际需求。有限时间一致性控制方法有效解决了渐近一致性中收敛时间趋于无穷这一弊端。与传统多智能体一致性控制方法相比,有限时间一致性要求多智能体系统在任意给定初始状态下,都有一个固定的收敛时间。尽管有限时间一致性控制方法解决了多智能体系统的有限时间一致性,但其收敛时间均依赖于系统的初始状态。
[0010]
为克服有限时间一致性的局限性,许多学者开展了固定时间一致性问题的研究工作。固定时间一致性的实现不仅要求多智能体系统在有限时间内实现一致性,还要求对任意初始状态,系统收敛时间具有常值上界。目前针对无领导的多智能体系统固定时间一致性提出的控制方法均需要连续的控制,这意味着在实现一致性过程中,智能体之间需要频
繁地进行通讯交流和控制更新,由此导致多智能体系统的能源被大量消耗。
技术实现要素:
[0011]
发明目的:鉴于目前针对无领导的多智能体系统固定时间一致性提出的控制方法均需要连续的控制的问题,本发明的目的在于通过设计一种基于事件触发的交通智能体系统固定时间二分一致性方法,该方法基于事件触发的控制协议,使得具有符号有向图的无领导一阶多智能体系统实现固定时间二分一致性,并降低该多智能体系统能量损耗,延长控制器使用寿命。
[0012]
技术方案:为实现上述目的,本发明采用的技术方案为:
[0013]
一种基于事件触发的交通智能体系统固定时间二分一致性方法,包括以下步骤:
[0014]
步骤1,采集交通智能体信息,根据交通智能体信息建立拓扑结构为符号有向图的无领导一阶多交通智能体系统模型;通过符号有向图的无领导一阶多交通智能体系统模型得到相应的拉普拉斯矩阵l;
[0015]
步骤2,确定基于事件触发的控制协议,使得每个交通智能体控制输入在事件触发时刻更新;
[0016]
基于事件触发的控制协议:
[0017][0018]
其中,u
i
(t)表示第i个交通智能体的控制输入,α、β表示控制参数,a、b表示控制增益,a
ij
表示有向边交通智能体i到交通智能体j的权重,表示交通智能体i在时刻的状态,n表示一阶交通多智能体系统中交通智能体的总数,控制增益a,b>0,控制参数0<α<1和β>1;s
[a]
定义为s
[a]
=sign(s)|s|
a
,其中sign(
·
)为符号函数;定义则在任意的时间段则在任意的时间段为第j个交通智能体的最新触发时刻;因此,第i个交通智能体的控制输入在自身节点事件触发时刻进行更新;
[0019]
步骤3,检测并获取交通智能体系统的初始状态x(0);
[0020]
步骤4,计算各交通智能体的状态测量误差e
i
(t):
[0021][0022]
令则状态测量误差简写为:
[0023][0024]
步骤5,确定分布式触发函数当第i个交通智能体的触发函数时,事件触发,此时该交通智能体的控制协议采集信息更新;
[0025][0026]
其中,表示第i个交通智能体的触发函数,c表示触发函数参数,c>0;
[0027]
步当有向图为结构平衡图时,令:
[0028][0029]
式中,λ
max
(l
t
θ2l)为矩阵l
t
θ2l的最大特征值,其中对角矩阵且矩阵θ对角元构成正向量可以使其中且γ=γ(y)≥0,s.t.z=ay
[α]
+γy
[β]
,且z
t
z=1,a,α,β>0,α≠β}l表示符号有向图对应的拉普拉斯矩阵;
[0030]
否则,当有向图为结构不平衡图时,令:
[0031][0032]
式中,其中对角矩阵λ=diag{ω1,ω2,
…
,ω
n
}>0使得
为矩阵的最小特征值,为矩阵l
t
λ2l的最大特征值,l
t
表示符号有向图对应的拉普拉斯矩阵的转置;
[0033]
步骤6,根据符号有向图的无领导一阶多交通智能体系统模型、控制参数及控制增益估算收敛时间上界;
[0034]
步骤7,迭代运行至各交通智能体状态绝对值趋于一致。
[0035]
优选的:步骤6根据符号有向图的无领导一阶多交通智能体系统模型、控制参数及控制增益估算收敛时间上界的方法:
[0036]
当有向图为结构平衡图时,此时,多交通智能体系统在控制协议和触发函数的共同作用下实现固定时间二分一致性,收敛时间上界一为:
[0037][0038]
其中:
[0039][0040]
其中表示的最大值,正数ρ取值需使k2>0,λ
max
(l
t
θ2l)表示矩阵l
t
θ2l的最大特征值。
[0041]
否则,当有向图为结构不平衡图时,此时,通过应用控制协议和触发函数,多交通智能体系统实现固定时间二分一致性,且收敛时间上界二为:
[0042][0043]
其中:
[0044][0045]
n表示一阶交通多智能体系统中交通智能体的总数,正数取值需使λ
max
(l
t
λ2l)表示矩阵l
t
λ2l的最大特征值,表示矩阵的最小特征值,min(a,b)表示取参数a和b的最小值。
[0046]
优选的:步骤1中所述交通智能体信息包括信号控制器信息和路口交通情况信息。
[0047]
优选的:步骤2中基于事件触发的控制协议:
[0048][0049]
其中,表示第i个路口智能体所检测到的车辆密度,表示第i个路口智能体所检测到的车辆密度和车辆密度变化率。
[0050]
优选的:事件触发时间间隔τ>0。
[0051]
本发明相比现有技术,具有以下有益效果:
[0052]
本发明通过应用控制协议和触发函数,具有符号有向图的一阶多智能体系统在固定时间内实现二分一致性,并避免zeno行为的发生。使得具有符号有向图的无领导一阶交通智能体系统实现固定时间二分一致性,并降低该交通智能体系统能量损耗,延长控制器使用寿命。
附图说明
[0053]
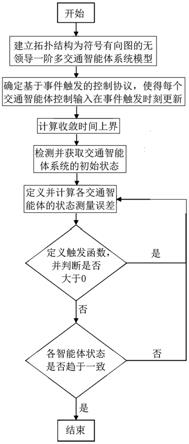
图1是基于事件触发的多智能体系统实现固定时间二分一致性的流程图。
[0054]
图2是基于事件触发的第i个智能体的控制框图。
[0055]
图3为六个智能体组成的一阶多智能体系统的拓扑关系图,其中图3a为结构平衡图,图3b为结构不平衡图。
[0056]
图4为拓扑结构平衡的各智能体位置轨迹图.
[0057]
图5为拓扑结构不平衡的各智能体位置轨迹图。
[0058]
图6为拓扑结构平衡的各智能体事件触发时刻图.。
[0059]
图7为拓扑结构不平衡的各智能体事件触发时刻图。
[0060]
图8为拓扑结构平衡的各智能体控制输入图。
[0061]
图9为拓扑结构不平衡的各智能体控制输入图。
具体实施方式
[0062]
下面结合附图和具体实施例,进一步阐明本发明,应理解这些实例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本申请所附权利要求所限定的范围。
[0063]
一种基于事件触发的交通智能体系统固定时间二分一致性方法,如图1
‑
3所示,包括以下步骤:
[0064]
步骤一:建立拓扑结构为符号有向图的无领导一阶多智能体系统模型;
[0065]
令表示由n个智能体组成的符号有向加权图,其中代表有限点集,代表边集,代表加权邻接矩阵。当(v
i
,v
j
)∈ε
时a
ij
≠0否则a
ij
=0对于图有向边(v
i
,v
j
)表示信息从节点v
i
流向节点v
j
从节点到的有向路径是由一系列有向边构成,其中p=1,2,
…
,q
‑
1,且该有向路径中的节点到都是不同的。若有向路径有相同的起点和终点,则称该有向路径为有向环。若有向环含有偶数个负边权值,则有向环为正;否则,该有向环为负。如果有向图的节点可以分为两组,且满足条件和以及a
ij
≥0,和a
ij
≤0,则称符号有向图是结构平衡的;否则,符号有向图是结构不平衡的。定义符号有向图的拉普拉斯矩阵为l=(l
ij
)
n
×
n
,其中若图中的权重均为正值,则称该图为正图,这是一种特殊的符号有向图。
[0066]
考虑一个由n个智能体组成的一阶多智能体系统,智能体i的动力学模型为:
[0067][0068]
其中x
i
(t)∈r,u
i
(t)∈r分别表示第i个智能体的位置状态和控制输入。
[0069]
本发明研究的一阶多智能体系统,有向符号加权图是强连通的。
[0070]
对具有符号有向图的多智能体系(1),若存在控制输入u
i
(t),使得对任意初始状态x
i
(0)恒有:
[0071][0072]
且存在一个正的常值t
max
,使得t≤t
max
恒成立,则称多智能体系统(1)实现固定时间二分一致性,其中t为与初值相关的收敛时间。
[0073]
步骤二:设计基于事件触发的控制协议,使得每个智能体控制输入在事件触发时刻更新;
[0074]
设计如下基于事件触发的控制协议:
[0075][0076]
其中,控制增益a,b>0控制参数0<α<1和β>1;s
[a]
定义为s
[a]
=sign(s)|s|
a
,其中sign(
·
)为符号函数。定义则在任意的时间段段为第j个智能体的最新触发时刻。因此,第i个智能体的控制输入在自
身节点事件触发时刻进行更新。
[0077]
步骤三:检测并获取多智能体系统的初始状态值x(0)。
[0078]
步骤四:定义并计算各智能体的状态测量误差值e
i
(t)。
[0079]
定义测量误差:
[0080][0081]
令则测量误差可简写为:
[0082][0083]
步骤五:设计分布式触发函数当第i个智能体的触发函数时,事件触发,此时该智能体的控制协议采集信息更新。
[0084]
设计分布式触发函数
[0085][0086]
其中,c>0,当第i个智能体的触发函数时,事件触发,此时该智能体的控制协议采集信息更新状态。
[0087]
当为结构平衡图时,令:
[0088][0089]
式中λ
max
(l
t
θ2l)为矩阵l
t
θ2l的最大特征值,k1的定义见具体实施方式中的引理3;
[0090]
否则,当为结构不平衡图时,令
[0091]
[0092]
式中,λ
max
(l
t
λ2l)表示矩阵l
t
λ2l的最大特征值,表示矩阵的最小特征值。
[0093]
步骤六:根据多智能体系统控制协议估算收敛时间上界;
[0094]
当为结构平衡图时,此时,多智能体系统(1)在控制协议(2)和触发函数(3)的共同作用下实现固定时间二分一致性,收敛时间上界为:
[0095][0096]
其中:
[0097][0098]
否则,当为结构不平衡图时,此时,通过应用控制协议(2)和触发函数(3),多智能体系统(1)实现固定时间二分一致性,且收敛时间上界为:
[0099][0100]
其中:
[0101][0102]
为证明步骤一到步骤六的有效性,本发明引用以下引理:
[0103]
引理1若符号有向图是强连通的,则是结构平衡的当且仅当以下任意一个条件成立:
[0104]
1)的每一个有向环都是正的。
[0105]
2)存在矩阵使得矩阵的所有元素均非负,其中令
[0106]
3)的拉普拉斯矩阵l有且仅有一个零特征值。
[0107]
引理2若符号有向图是强连通结构平衡图,则存在正向量和引理1中定义的对角矩阵d,使得其中l为符号有向图的拉普拉斯矩阵。
[0108]
引理3若符号有向图是强连通结构平衡的,则存在矩阵使得矩阵dld为一个正图的拉普拉斯矩阵。给定三个正数a,α和β,其中α≠β定义向量集:
[0109]
且γ=γ(y)≥0
[0110]
s.t.z=ay
[α]
+γy
[β]
,且z
t
z=1}
[0111]
则存在:
[0112][0113]
其中且的定义见引理2中向量
[0114]
引理4对于任意给定的x
i
>0(i=1,2,
…
,n)和s>μ≥1下列不等式恒成立:
[0115][0116]
引理5对于系统
[0117][0118]
如果存在一个连续正定的径向无界函数v(x(t)):r
→
r
+
∪{0}且满足:
[0119]
1)
[0120]
2)系统(6)的任意解x(t)满足:
[0121][0122]
其中则系统(6)实现全局固定时间稳定且收敛时间t满足:
[0123][0124]
引理6若符号有向图是强连通结构不平衡的,则存在对角阵λ=diag{ω1,ω2,
…
,ω
n
}>0使λl+l
t
λ>0。
[0125]
其证明过程为考虑到符号有向图分为结构平衡图和结构不平衡图。接下来,我们将在这两种拓扑结构下分别证明多智能体系统(1)在控制协议(2)和触发函数(3)的作用下,均可实现固定时间二分一致性。
[0126]
首先证明图是结构平衡图时相关结论成立。构建lyapunov函数:
[0127][0128]
其中于引理2中定义。
[0129]
定义y(t)=[y1(t),y2(t),
…
,y
n
(t)]
t
,e(t)=[e1(t),e2(t),
…
,e
n
(t)]
t
,对式(7)关于时间t求导,可得:
[0130][0131]
其中且
[0132]
基于引理3,结合式(3),可得:
[0133][0134]
其中z(t)=ay(t)
[α]
+by(t)
[β]
,μ=b且正数ρ取值需使k2>0。
[0135]
为方便证明,引入中间变量:
[0136][0137]
根据引理4则有:
[0138][0139]
和
[0140][0141]
其中
[0142]
联立式(8)
‑
(10),可得:
[0143][0144]
其中,γ1,γ2,p和q的定义见式(4),由引理5可知,v在固定时间内收敛到0,即y(t)=lx(t)=0.根据引理1,可知矩阵l的秩为n
‑
1且有ld1
n
=0,可得x(t)∈span{d1
n
}即其中收敛时间t的上界为
[0145]
其次,当图是结构不平衡图时,构建lyapunov函数:
[0146][0147]
类似于上述结构平衡图的推导过程,可得收敛时间上界为
其中和的定义见式(5),且有ω
max
=max{ω1,ω2,
…
,ω
n
}和
[0148]
综上所述,应用控制协议(2)和触发函数(3),多智能体系统(1)实现固定时间二分一致性。
[0149]
步骤七:迭代运行至各智能体状态绝对值趋于一致;
[0150]
在实际应用中,基于事件触发的控制协议还需要保证事件触发时间间隔τ>0,以确保整个多智能体系统在收敛过程中,不会在某一短时间内无限次触发控制协议,即避免zeno行为发生。
[0151]
证明过程为定义函数f
i
(t):
[0152][0153]
令基于下列不等式
[0154][0155]
其中,ω
min
=min{ω1,ω2,
…
,ω
n
},对式(11)关于时间t求导,可得:
[0156][0157]
其中
[0158]
令其中为下列不等式的解:
[0159][0160]
对式(12)求解得:
[0161][0162]
将式(13)化简,可得触发时间间隔τ
i
的表达式为:
[0163][0164]
因此,通过使用控制协议(2)和触发函数(3),多智能体系统(1)中的所有智能体均有效避免了zeno行为的发生。证毕。
[0165]
对于上述的证明,将通过数值仿真来验证本文所得理论结果的有效性。
[0166]
实施例子:交通控制多智能体系统中固定时间二分一致性控制。
[0167]
以交通控制多智能体系统为例,说明固定时间二分一致性控制方法的有效性。由于在实际应用中,多智能体系统拓扑结构可能为结构平衡图,也有可能为结构不平衡图,所以需要分别考虑两种情况下的多智能体状态。令交通控制多智能体系统是由六个路口智能体(信号控制器和路口交通情况采集)构成的。其相互拓扑作用其拓扑关系图如图3所示,其中图3.(a)为结构平衡图,图3.(b)为结构不平衡图。图3.(a)和图3.(b)的邻接矩阵分别为:
[0168]
和
[0169]
路口智能体动态可描述为:
[0170][0171]
其中x
i
和分别表示第i个路口智能体所检测到的车辆密度和车辆密度变化率,选择合适的控制增益和参数分别为:a=1,b=2,α=0.5和β=1.5,设置触发函数参数c=0.5,随机选取交通控制多智能体系统初始状态x(0)=[
‑
10,8.7,2.3,
‑
1.5,5.5,
‑
7.3]
t
,图4
‑
7分别显示的是具有强连通拓扑结构的交通控制多智能体系统中各路口智能体的检测车流密度状态和事件触发时刻。可以发现,无论拓扑图是结构平衡图或结构不平衡图,交通多智能体系统均可在固定时间内实现一致性,即各个路口车流密度在固定时间内趋于一致。图8、9显示的是各路口智能体的控制输入随时间变化的趋势。由图8、9可知,当拓扑图为强连通图时,各路口智能体的控制输入均为分段函数,避免了能量的持续输出,减少了系统的能量损耗,延长了控制器使用寿命。
[0172]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1