一种显微镜实时图像优化方法及系统与流程
1.本发明涉及图像处理技术领域,特别是关于一种显微镜实时图像优化方法及系统。
背景技术:
2.显微成像是研究生命科学的重要技术手段之一。超分辨显微成像技术可以从细胞尺度上揭示生命的奥秘,而结构光超分辨成像技术由于光毒性低、荧光光子利用率高、时间分辨率高等特点,可以实现长时程实时观测细胞、细胞器的运动协作过程。实时显微成像中,物体的荧光信号经光学系统传递,再由精密的相机采集,经过电信号传输,最终在终端软件上显示出细胞的动态图像。在信号的传递过程中,不可避免地由于噪声的影响,特别是相机的电子干扰,导致最终成像的时候,图像显示上有噪点的存在,影响最终成像显示的质量。
3.目前常用的去噪点方法由于计算耗时,实时性较差。因此,开发一种显微镜实时图像快速去噪点的方法对实时成像,特别是超分辨实时成像具有重要的意义。
4.目前有一种中值滤波算法,它是通过将像素领域的像素大小取中值,可以用来进行图像去噪点。中值滤波算法的主要方法包括:在图像每个像素点以其为中心的领域取n*n的像素点矩阵,对矩阵中像素大小进行排序,取中值代替矩阵中心点像素值大小,从而达到去除图像噪点的作用。中值滤波算法对脉冲噪声效果较好,也可以消除椒盐噪声,但是对于消除高斯噪声的效果则较差。在实际的显微显微镜系统成像过程中,有一定的概率出现高斯噪声点,影响实时的显微图像质量,以及使用中值滤波算法去除噪声有一定的耗时,因而该算法有一定的局限性,不适用于实时显微镜系统中。
技术实现要素:
5.本发明的目的在于提供一种显微镜实时图像优化方法及系统,其能够用于显微镜成像过程中快速去噪点。
6.为实现上述目的,本发明提供一种显微镜实时图像优化方法,该方法包括:
7.步骤1,统计获取待优化的原始图像的显微镜系统在多种成像工况下的噪点比例系数,计算显微镜系统的噪点比例系数p
system
;
8.步骤2,获取所述原始图像被扣除与所述p
system
相关的噪点后的图像灰度最大值g
max
;
9.步骤3,将所述原始图像中大于所述g
max
的像素点值设置为g
max
,而所述原始图像中低于g
max
的像素点值保持不变,获得优化后的图像。
10.进一步地,所述多种成像工况包括成像视野、成像曝光时间和激光功率中的一种以上。
11.进一步地,所述多种成像工况同时包括成像视野、成像曝光时间和激光功率;
12.所述p
system
通过式(1)计算得到:
13.p
system
=αp
roi
+βp
exp osure
+γp
laserpowrr+c
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
14.其中,p
roi
表示预设的成像视野的噪点比例系数,α表示预设的成像视野对所述p
system
的占比权重;p
exp osure
表示预设的成像曝光时间的噪点比例系数,β表示预设的成像曝光时间对所述p
system
的占比权重;p
laserpower
表示预设的激光功率的噪点比例系数,γ表示预设的激光功率对所述p
system
的占比权重,c表示暗电流散粒噪声的比例系数。
15.进一步地,α、β、γ均在(0-1)范围取值。
16.进一步地,所述显微镜实时图像优化方法还包括:
17.步骤4,将所述原始图像像素点的二维矩阵i
origin
转化为一维数组i
linear
,将所述i
linear
中像素点按像素值大小进行排序,得到一维数组i
sort
:i
linear
r(i
origin
),i
sort
=s(i
linear
),其中,r()和s()表示函数;
18.所述步骤3通过式(2)描述得到:
19.g
max
=g[i
sort
(row
×
col
×
(1-p
system
))]
ꢀꢀꢀꢀꢀ
(2)
[0020]
其中,g[]
max
表示所述图像灰度最大值的获取函数g[]表示获取对应像素点像素值大小,g
max
表示所述图像灰度最大值,i
sort
表示对原始图像的灰度值矩阵i进行从小到大排序后的一维数组,row
×
col表示所述原始图像的分辨率。
[0021]
本发明还提供一种显微镜实时图像优化系统,该系统包括:
[0022]
噪点比例系数计算单元,其用于统计显微镜系统在多种成像工况下的噪点比例系数,计算显微镜系统的噪点比例系数p
system
;
[0023]
图像处理单元,其用于获取所述原始图像被扣除与所述p
system
相关的噪点后的图像灰度最大值g
max
;
[0024]
图像优化单元,其用于将所述原始图像中大于所述g
max
的像素点值设置为g
max
,而所述原始图像中低于g
max
的像素点值保持不变,获得优化后的图像。
[0025]
进一步地,所述多种成像工况包括成像视野、成像曝光时间和激光功率中的一种以上。
[0026]
进一步地,所述多种成像工况同时包括成像视野、成像曝光时间和激光功率;
[0027]
所述p
system
通过式(1)计算得到:
[0028]
p
system
=αp
roi
+βp
exp osure
+γp
laserpower
+c
ꢀꢀꢀꢀꢀꢀꢀ
(1)
[0029]
其中,p
roi
表示预设的成像视野的噪点比例系数,α表示预设的成像视野对所述p
system
的占比权重;p
exp osure
表示预设的成像曝光时间的噪点比例系数,β表示预设的成像曝光时间对所述p
system
的占比权重;p
laserpower
表示预设的激光功率的噪点比例系数,γ表示预设的激光功率对所述p
system
的占比权重,c表示暗电流散粒噪声的比例系数。
[0030]
进一步地,α、β、γ均在(0-1)范围取值。
[0031]
进一步地,所述显微镜实时图像优化系统还包括:
[0032]
图像预处理单元,其用于将所述原始图像像素点的二维矩阵i
origin
转化为一维数组i
linear
,将所述i
linear
中像素点按像素值大小进行排序,得到一维数组i
sort
:i
linear
=r(i
origin
),i
sort
=s(i
linear
),其中,r()和s()表示函数;
[0033]
所述图像优化单元通过式(2)描述得到:
[0034]gmax
=g[i
sort
(row
×
col
×
(1-p
system
))]
ꢀꢀꢀꢀ
(2)
[0035]
其中,g[]
max
表示所述图像灰度最大值的获取函数g[]表示获取对应像素点像素
值大小,g
max
表示所述图像灰度最大值,i
sort
表示对原始图像的灰度值矩阵i进行从小到大排序后的一维数组,row
×
col表示所述原始图像的分辨率。
[0036]
本发明由于通过统计分析影响图像成像质量相关性强的噪点占整个图像像素点数量的比例,经过大量的测试、统计之后得到了该显微镜系统的相关性强的噪点比例系数。通过实际成像测试,在一次成像结束后,将得到的系统噪点比例系数扣除之后,将扣除相关性强噪点之后的图像最大灰度值和最小值重新映射,因此,本发明不仅对信号保真性影响低,噪点扣除效果显著,而且时间复杂度低、计算速度快,可以完全满足显微成像过程中的实时性要求,便于用户追踪细胞的动态过程,提高成像实验质量。
附图说明
[0037]
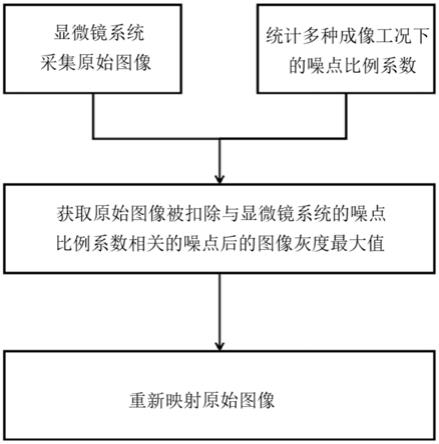
图1为本发明实施例提供的显微镜实时图像优化方法的流程示意图。
具体实施方式
[0038]
下面结合附图和实施例对本发明进行详细的描述。
[0039]
如图1所示,本发明实施例提供的显微镜实时图像优化方法包括:
[0040]
步骤1,统计获取待优化的原始图像的显微镜系统在多种成像工况下的噪点比例系数,计算显微镜系统的噪点比例系数p
system
。
[0041]
步骤2,获取所述原始图像被扣除与所述p
system
相关的噪点后的图像灰度最大值g
max
。
[0042]
步骤3,将所述原始图像中大于所述g
max
的像素点值设置为g
max
,而所述原始图像中低于g
max
的像素点值保持不变,获得优化后的图像。
[0043]
本实施例从显微显微镜系统的组成结构出发,分析信号在传递的过程中所受到的噪声影响,其主要受到三种类型的噪声影响,分别是与信号相关的散粒噪声、暗电流相关的散粒噪声(也称暗噪声)、以及读出噪声。对于其中的读出噪声,是满足高斯分布的,而对于显微显微镜系统而言,暗噪声占比非常少且固定,可以认为其占比是一个常数c。其中的读出噪声与相机读出速度相关,综合考虑系统的成像视场与曝光时间得到其噪点占比比例系数。与信号相关的散粒噪声可以通过统计不同的激光功率下的噪点得到其噪点比例系数。考虑显微镜系统的稳定性,结合大量实验成像数据进行统计分析,得到该系统的影响成像质量相关性高的噪点比例系数。因此,在一个实施例中,步骤1中多种成像工况可以同时理解为包括成像视野、成像曝光时间和激光功率,也可以理解为这三种成像工况中的一种或任意两种成像工况的组合,还可以理解为这三种成像工况之外的工况。
[0044]
针对上述实施例中列举的任一一种成像工况,对应的噪点比例系数可以但不限于采用下面方法获取得到。
[0045]
例如:在给定系统曝光时间最长,激光功率最低的工况下,考虑不同的成像视场的情况下,统计分析噪点比例系数。
[0046][0047]
其中,p
roi
表示系统给定成像视野成像工况下的噪点比例系数,ni表示统计的第i
张图像的噪点统计个数,mi表示第i张图像的像素点个数,total表示统计的图像数据数目。不同的成像视野的噪点比例数有所不同,可以给不同成像视野计算显微镜系统对应噪点比例系数。
[0048]
在给定选择最大的成像视场,激光功率最低的工况下,考虑不同的曝光时间情况下,统计分析噪点比例系数。
[0049][0050]
其中,p
exposure
表示不同曝光时间成像工况下的噪点比例系数,ni表示统计的第i张图像的噪点统计个数,mi表示第i张图像的像素点个数,total表示统计的图像数据数目。
[0051]
在给定最大的成像视场和最长的曝光时间工况下,考虑不同的激光功率,统计分析噪点比例系数。
[0052][0053]
其中,p
laserpower
表示不同激光功率成像工况下的噪点比例系数,ni表示统计的第i张图像的噪点统计个数,mi表示第i张图像的像素点个数,total表示统计的图像数据数目。
[0054]
在一个实施例中,所述多种成像工况同时包括成像视野、成像曝光时间和激光功率。所述p
system
通过式(1)计算得到:
[0055]
p
system
=αp
roi
+βp
exp osure
+γp
plaserpower
+c
ꢀꢀꢀꢀꢀ
(1)
[0056]
其中,p
roi
表示预设的成像视野的噪点比例系数,α表示预设的成像视野对所述p
system
的占比权重;p
exp osure
表示预设的成像曝光时间的噪点比例系数,β表示预设的成像曝光时间对所述p
system
的占比权重;p
laserpower
表示预设的激光功率的噪点比例系数,γ表示预设的激光功率对所述p
system
的占比权重,c表示暗电流散粒噪声的比例系数。c是非常小的常数,一般情况下取值是0。
[0057]
其中的α、β、γ的取值范围在(0-1),α、β、γ在不同的显微镜系统中数值不尽相同,针对不同的显微镜系统以及成像工况需要实际观察不同数值的效果,然后确定最优的权重,以得到最佳的实时显微成像图像去噪点效果。也可以理解为,针对特定的显微镜系统,可以通过统计分析不同成像工况下的噪点比例系数情况,给出最优的α、β、γ值,从而应用于该显微显微镜系统的实时预览图像优化处理。理想的情况下,α、β、γ的取值均为1。当成像工况为显微镜系统的成像视场最大、曝光时间最长时,α与β的取值近似可以取0,γ的取值可以为1;当成像工况为显微镜系统的成像视场最大、激光功率最低时,α与γ的取值近似可以取0,β的取值可以为1;当成像工况为显微镜系统的曝光时间最长、激光功率最低时,β与γ的取值近似可以取0,α的取值可以为1。
[0058]
在一个实施例中,所述显微镜实时图像优化方法还包括:
[0059]
步骤4,将所述原始图像像素点的二维矩阵i
origin
转化为一维数组i
linear
,将所述i
linear
中像素点按像素值大小进行排序,得到一维数组i
sort
:i
linear
r(i
origin
),i
sort
=s(i
linear
),其中,r()和s()表示函数。
[0060]
步骤3的目的是获得原始图像的扣除了噪点比例系数计算得到的图像最大灰度
值。具体地,将原始图像二维像素矩阵转换成一维数组,再进行大小排序,再乘以系统噪点比例系数得到扣除噪点后的图像最大灰度值。也就是说,步骤3通过式(2)描述得到:
[0061]gmax
=g[i
sort
(row
×
col
×
(1-p
system
))]
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0062]
其中,g[]
max
表示所述图像灰度最大值的获取函数g[]表示获取对应像素点像素值大小,g
max
表示所述图像灰度最大值,i
sort
表示对原始图像的灰度值矩阵i进行从小到大排序后的一维数组,row
×
col表示所述原始图像的分辨率。
[0063]
本发明实施例提供显微镜实时图像优化系统包括噪点比例系数计算单元、图像处理单元和图像优化单元,其中:
[0064]
噪点比例系数计算单元用于统计显微镜系统在多种成像工况下的噪点比例系数,计算显微镜系统的噪点比例系数p
system
。
[0065]
图像处理单元用于获取所述原始图像被扣除与所述p
system
相关的噪点后的图像灰度最大值g
max
。
[0066]
图像优化单元用于将所述原始图像中大于所述g
max
的像素点值设置为g
max
,而所述原始图像中低于g
max
的像素点值保持不变,获得优化后的图像。
[0067]
在一个实施例中,所述多种成像工况包括成像视野、成像曝光时间和激光功率中的一种以上。
[0068]
在一个实施例中,所述多种成像工况同时包括成像视野、成像曝光时间和激光功率。所述p
system
通过式(1)计算得到。
[0069]
在一个实施例中,本发明实施例提供显微镜实时图像优化系统还包括图像预处理单元,图像预处理单元用于将所述原始图像像素点的二维矩阵i
origin
转化为一维数组i
linear
,将所述i
linear
中像素点按像素值大小进行排序,得到一维数组i
sort
:i
linear
=r(i
origin
),i
sort
=s(i
linear
),其中,r()和s()表示函数。
[0070]
所述图像优化单元通过式(2)描述得到:
[0071]gmax
=g[i
sort
(row
×
col
×
(1-p
system
))]
ꢀꢀꢀꢀꢀ
(2)
[0072]
其中,g[]
max
表示所述图像灰度最大值的获取函数g[]表示获取对应像素点像素值大小,g
max
表示所述图像灰度最大值,i
sort
表示对原始图像的灰度值矩阵i进行从小到大排序后的一维数组,row
×
col表示所述原始图像的分辨率。
[0073]
本发明提出的显微镜实时图像优化方法和系统,基于统计不同成像工况下的噪点比例系数,计算显微镜系统的噪点比例系数,然后应用这个比例系数扣除图像的噪点后得到图像的最大灰度值,重新映射图像。这个方法不仅对信号保真性影响低,噪点扣除效果显著,而且时间复杂度低、计算速度快,可以完全满足显微成像过程中的实时性要求,便于用户追踪细胞的动态过程,提高成像实验质量。
[0074]
最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。本领域的普通技术人员应当理解:可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1