一种小型多体节压电机器人及其激励方法
1.本发明属于机器人技术领域,具体地涉及一种小型多体节压电机器人及其激励方法。
背景技术:
2.近年来,小型机器人由于其体积小、重量轻等优点,已成为一个重要的研究方向。它们可以在大尺寸机器人或人类无法到达的狭窄空间内移动和工作,也可以在要求轻量化的工作环境中进行部署和应用,这些特点使它们成为操纵、搜索和监视等工作的候选者。
3.传统的小型机器人大多采用电磁驱动方式,需要传动系统实现速度变换,结构相对较为复杂,限制了它们进一步的小型化和轻量化,此外,电磁驱动型机器人输出位移分辨率一般只能达到压微米级且不易实现多自由度运动输出,这些都限制了传统的小型电磁驱动型机器人的应用范围。相比之下,压电材料具有响应快、分辨率高、功率密度高、断电自锁、无电磁干扰等优点,压电致动型机器人易于实现小型化、轻量化及高位移分辨率等特性。
4.本发明提出的小型多体节压电机器人,采用多压电体节并联的结构形式,通过多压电体节相互协调配合,实现平面运动输出;首先,该小型多体节压电机器人继承了并联型装置的优点,具有高刚度和高位移分辨率的突出优势;其次,所使用的压电体节结构简单,体积小,重量轻,成本低,易于加工装配;最后,提出了该小型多体节压电机器人的一种激励方法,以周期性激励信号激励该小型多体节压电机器人,利用摩擦力驱动其连续步进运动,实现平面运动输出。总而言之,本发明的小型多体节压电机器人具有一般小型机器人体积小和重量轻等优点的同时,克服了其位移分辨率和运动灵活性比较差的缺点,这些特点将极大地拓展其应用范围,使其在超精密驱动、定位及精密搬运、检测等领域有着广阔的应用前景。
技术实现要素:
5.为了解决传统的小型机器人结构复杂、运动灵活性差和输出位移分辨率低等问题,本发明提出了一种小型多体节压电机器人及其激励方法。
6.本发明是通过以下方案实现的:
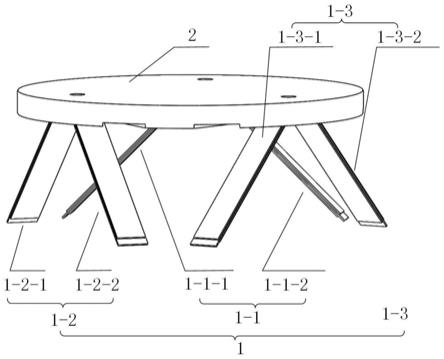
7.一种小型多体节压电机器人,所述机器人包括3组“人”字形压电体节1和一个基体2;所述的3组“人”字形压电体节1
‑
1、1
‑
2、1
‑
3结构相同,每组“人”字形压电体节结构均包括两个驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2,所述每组“人”字形压电体节结构的两个驱动足按一定夹角固定连接;所述3组“人”字形压电体节1的顶端与基体2连接的平面呈120度固定连接;所述的驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2施加相同的电压激励信号时弯曲方向相反,驱动“人”字形压电体节1
‑
1、1
‑
2、1
‑
3实现“张开”或“收合”动作。
8.进一步地,所述每组“人”字形压电体节1的两个驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2之间的夹角为大于0度小于180度的任意角度。
9.进一步地,所述小型多体节压电机器人的3组“人”字形压电体节1的驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2施加激励信号时沿“张合”方向弯曲;每组“人”字形压电体节1的驱动足与工作面之间相对运动产生的摩擦力合力不为0。
10.进一步地,所述小型多体节压电机器人的3组“人”字形压电体节1的组数可以为1个或2个,当数量为1时,基于惯性致动原理实现单自由度直线运动,当数量为2时,一对“人”字形压电体节正交布置,基于惯性致动原理实现平面两自由度直线运动。
11.一种应用于小型多体节压电机器人的激励方法,所述激励方法能够激励小型多体节压电机器人的驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2沿“张合”方向弯曲,驱动单个“人”字形压电体节1
‑
1、1
‑
2、1
‑
3实现沿“张
‑
合”方向的直线运动,通过3组压电体节1的协调配合驱动机器人实现平面运动;
12.在所述平面运动中,实现沿y轴正向运动输出的激励方法如下:
13.步骤一、“人”字形压电体节1
‑
3施加幅值上升的激励电压信号,两个驱动足1
‑3‑
1和1
‑3‑
2沿“张合”方向向外弯曲,实现“张开”动作并离开工作面;
14.步骤二、另外两个“人”字形压电体节1
‑
1、1
‑
2同时施加幅值缓慢上升的激励电压信号,同时实现“张开”动作,由于惯性,保持静止;
15.步骤三、“人”字形压电体节1
‑
3施加幅值下降的激励电压信号,两个驱动足1
‑3‑
1、1
‑3‑
2沿厚度方向内弯曲,实现“收和”动作驱动小型多体节压电机器人绕x轴旋转一个微小角度并倾向y轴正方向;
16.步骤四、另外两个“人”字形压电体节1
‑
1、1
‑
2同时施加幅值快速下降的激励电压信号,同时实现快速“收合”动作,“人”字形压电体节1
‑
1、1
‑
2的两个驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2与工作面的摩擦力不同,它们的合力存在沿y轴正方向的分量,可驱动“人”字形压电体节1
‑
1和“人”字形压电体节1
‑
2分别运动一步,通过“人”字形压电体节1
‑
1和“人”字形压电体节1
‑
2共同驱动小型多体节压电机器人沿y轴正向运动一步;
17.步骤五、重复步骤一至步骤四,可驱动小型多体节压电机器人实现沿y轴正向的连续步进运动;
18.在所述平面运动中,实现绕z轴顺时针旋转运动输出的激励方法如下:
19.步骤六、3组“人”字形压电体节1同时施加快速上升的激励电压信号,它们同时完成“快速张开”动作,所有驱动足在工作面上实现“滑移”运动,由于惯性,保持静止;
20.步骤七、3组“人”字形压电体节1同时施加缓慢下降的激励电压信号,它们同时完成“缓慢收合”动作,所有驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2与工作面发生“粘滞”运动,由于同一压电体节1
‑
1、1
‑
2、1
‑
3的两个驱动足1
‑1‑
1、1
‑1‑
2,1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2与工作面的摩擦力不同,利用摩擦力的合力驱动3组“人”字形压电体节1同时沿顺时针圆周的切向运动一步;
21.步骤八、重复步骤六至步骤七,可驱动小型多体节压电机器人实现绕z轴顺时针连续旋转步进运动。
22.进一步地,所述小型多体节压电机器人的激励方法,实现该方法所需的激励电压信号的波形为非对称波,所述非对称波为非对称三角波或非对称梯形波。
23.进一步地,所述小型多体节压电机器人的激励方法,能够通过激励信号主动控制的方法改变3组“人”字形压电体节1的驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2与工
作面的摩擦力,调整驱动力的大小和方向,实现反向驱动。
24.本发明有益效果
25.1.本发明提供了一种小型多体节压电机器人,具有结构简单、体积小及重量轻的特点,通过多压电体节并联的构型获得了高位移分辨率和大结构刚度。
26.2.本发明提供的小型多体节压电机器人的激励方法可以激励多压电体节协调配合运动,驱动小型多体节压电机器人实现平面直线和旋转运动输出,获得了灵活运动输出的能力,大大的拓展了小型机器人的应用范围,使其在超精密驱动、定位及精密搬运、检测等领域有着广阔的应用前景。
附图说明
27.图1为本发明的小型多体节压电机器人的三维示意图;
28.图2为本发明的小型多体节压电机器人单体节直线运动及对应激励方案示意图,其中,umax为正向电压幅值的极大值,t为所述激励方法的周期,t
a
为单体节直线运动激励方案初始时刻,t
b
为单体节直线运动激励方案电压幅值升到极大值时刻,t
c
为单体节直线运动激励方案电压幅值降到极小值时刻;
29.图3为本发明的小型多体节压电机器人直线运动原理示意图;
30.图4为本发明的小型多体节压电机器人直线运动激励方案示意图,其中,umax为正向电压幅值的极大值,t为所述激励方法的周期,t
a
、t
b
、t
c
、t
d
和t
e
为激励方案一个周期4个子步的始末时刻;
31.图5为本发明的小型多体节压电机器人旋转运动原理示意图;
32.图6为本发明的小型单体节压电机器人及其激励方案示意图;
33.图7为本发明的小型双体节压电机器人及其激励方案示意图,其中,图中x、y轴表示小型多体节压电机器人工作平面内两相互垂直的方向,z轴所指的方向为垂直于小型多体节压电机器人工作平面的方向。
具体实施方式
34.下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.具体实施方式一:
36.一种小型多体节压电机器人,所述机器人包括3组“人”字形压电体节1和一个基体2;所述的3组“人”字形压电体节1
‑
1、1
‑
2、1
‑
3结构相同,每组“人”字形压电体节结构均包括两个驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2,所述每组“人”字形压电体节结构的两个驱动足按一定夹角固定连接;所述3组“人”字形压电体节1的顶端与基体2连接的平面呈120度固定连接;所述的驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2施加相同的电压激励信号时弯曲方向相反,驱动“人”字形压电体节1
‑
1、1
‑
2、1
‑
3实现“张开”或“收合”动作。
37.所述每组“人”字形压电体节1的两个驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2之间的夹角为大于0度小于180度的任意角度。
38.所述小型多体节压电机器人的3组“人”字形压电体节1的驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2施加激励信号时沿“张合”方向弯曲;3组“人”字形压电体节1的两个驱动足1
‑1‑
1和1
‑1‑
2,或1
‑2‑
1和1
‑2‑
2,或1
‑3‑
1和1
‑3‑
2与工作面接触状态不同,摩擦系数存在一定的差异,与工作面之间相对运动产生的摩擦力合力不为0。
39.所述小型多体节压电机器人的3组“人”字形压电体节1的组数可以为1个或2个,当数量为1时,基于惯性致动原理实现单自由度直线运动,当数量为2时,一对“人”字形压电体节正交布置,基于惯性致动原理实现平面两自由度直线运动。
40.一种应用于小型多体节压电机器人的激励方法,所述激励方法能够激励小型多体节压电机器人的驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2沿“张合”方向弯曲,驱动单个“人”字形压电体节1
‑
1、1
‑
2、1
‑
3实现沿“张
‑
合”方向的直线运动,通过3组压电体节1的协调配合驱动机器人实现平面运动;
41.在所述平面运动中,实现沿y轴正向运动输出的激励方法如下:
42.步骤一、“人”字形压电体节1
‑
3施加幅值上升的激励电压信号,两个驱动足1
‑3‑
1和1
‑3‑
2沿“张合”方向向外弯曲,实现“张开”动作并离开工作面;
43.步骤二、另外两个“人”字形压电体节1
‑
1、1
‑
2同时施加幅值缓慢上升的激励电压信号,同时实现“张开”动作,由于惯性,保持静止;
44.步骤三、“人”字形压电体节1
‑
3施加幅值下降的激励电压信号,两个驱动足1
‑3‑
1、1
‑3‑
2沿厚度方向内弯曲,实现“收和”动作驱动小型多体节压电机器人绕x轴旋转一个微小角度并倾向y轴正方向;
45.步骤四、另外两个“人”字形压电体节1
‑
1、1
‑
2同时施加幅值快速下降的激励电压信号,同时实现快速“收合”动作,“人”字形压电体节1
‑
1、1
‑
2的两个驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2与工作面的摩擦力不同,它们的合力存在沿y轴正方向的分量,可驱动“人”字形压电体节1
‑
1和“人”字形压电体节1
‑
2分别运动一步,通过“人”字形压电体节1
‑
1和“人”字形压电体节1
‑
2共同驱动小型多体节压电机器人沿y轴正向运动一步;
46.步骤五、重复步骤一至步骤四,可驱动小型多体节压电机器人实现沿y轴正向的连续步进运动;
47.在所述平面运动中,实现绕z轴顺时针旋转运动输出的激励方法如下:
48.步骤六、3组“人”字形压电体节1同时施加快速上升的激励电压信号,它们同时完成“快速张开”动作,所有驱动足在工作面上实现“滑移”运动,由于惯性,保持静止;
49.步骤七、3组“人”字形压电体节1同时施加缓慢下降的激励电压信号,它们同时完成“缓慢收合”动作,所有驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2与工作面发生“粘滞”运动,由于同一压电体节1
‑
1、1
‑
2、1
‑
3的两个驱动足1
‑1‑
1、1
‑1‑
2,1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2与工作面的摩擦力不同,利用摩擦力的合力驱动3组“人”字形压电体节1同时沿顺时针圆周的切向运动一步;
50.步骤八、重复步骤六至步骤七,可驱动小型多体节压电机器人实现绕z轴顺时针连续旋转步进运动。
51.所述小型多体节压电机器人的激励方法,实现该方法所需的激励电压信号的波形为非对称波,所述非对称波为非对称三角波或非对称梯形波。
52.所述小型多体节压电机器人的激励方法,能够通过激励信号主动控制的方法改变
3组“人”字形压电体节1的驱动足1
‑1‑
1、1
‑1‑
2、1
‑2‑
1、1
‑2‑
2、1
‑3‑
1、1
‑3‑
2与工作面的摩擦力,调整驱动力的大小和方向,实现反向驱动。
53.具体实施方式二:
54.参见图6说明本实施方式,本实施方式与具体实施方式一所述的小型多体节压电机器人的区别在于,机器人由1个“人”字形压电体节1构成,通过施加周期性锯齿波激励信号即可激励机器人实现单自由度直线运动输出,驱动机器人沿y轴正向移动具体步骤为:
55.步骤一、“人”字形压电体节1的两个驱动足1
‑
1和1
‑
2同时施加快速上升的激励电压信号,它们同时完成“快速张开”动作,两个驱动足1
‑
1和1
‑
2在工作面上实现“滑移”运动,由于惯性,保持静止;
56.步骤二、“人”字形压电体节1的两个驱动足1
‑
1和1
‑
2同时施加缓慢下降的激励电压信号,它们同时完成“缓慢收合”动作,两个驱动足1
‑
1和1
‑
2与工作面发生“粘滞”运动,由于两个驱动足1
‑
1和1
‑
2与工作面的摩擦力不同,利用摩擦力的合力驱动机器人沿y轴正向运动一步;
57.步骤三、重复步骤一至步骤二,可驱动机器人实现沿y轴正向连续步进运动。
58.具体实施方式三:
59.参见图7说明本实施方式,本实施方式与具体实施方式一所述的小型多体节压电机器人的区别在于,机器人由2个正交布置的“人”字形压电体节1
‑
1和1
‑
2构成,通过施加周期性锯齿波激励信号即可激励机器人实现平面自由度直线运动输出,驱动机器人沿y轴正向移动具体步骤为:
60.步骤一、“人”字形压电体节1
‑
2的两个驱动足1
‑2‑
1和1
‑2‑
2同时施加上升的激励电压信号,它们同时完成“张开”动作,离开工作面;
61.步骤二、“人”字形压电体节1
‑
1的两个驱动足1
‑1‑
1和1
‑1‑
2同时施加快速上升的激励电压信号,它们同时完成“快速张开”动作,两个驱动足1
‑1‑
1和1
‑1‑
2在工作面上实现“滑移”运动,由于惯性,保持静止;
62.步骤三、“人”字形压电体节1
‑
1的两个驱动足1
‑1‑
1和1
‑1‑
2同时施加缓慢下降的激励电压信号,它们同时完成“缓慢收合”动作,两个驱动足1
‑1‑
1和1
‑1‑
2与工作面发生“粘滞”运动,由于两个驱动足1
‑1‑
1和1
‑1‑
2与工作面的摩擦力不同,利用摩擦力的合力驱动机器人沿y轴正向运动一步;
63.步骤四、重复步骤二至步骤二,可驱动机器人实现沿y轴正向连续步进运动。
64.驱动机器人沿x轴正向移动具体步骤为:
65.步骤一、“人”字形压电体节1
‑
1的两个驱动足1
‑1‑
1和1
‑1‑
2同时施加上升的激励电压信号,它们同时完成“张开”动作,离开工作面;
66.步骤二、“人”字形压电体节1
‑
2的两个驱动足1
‑2‑
1和1
‑2‑
2同时施加快速上升的激励电压信号,它们同时完成“快速张开”动作,两个驱动足1
‑2‑
1和1
‑2‑
2在工作面上实现“滑移”运动,由于惯性,保持静止;
67.步骤三、“人”字形压电体节1
‑
2的两个驱动足1
‑2‑
1和1
‑2‑
2同时施加缓慢下降的激励电压信号,它们同时完成“缓慢收合”动作,两个驱动足1
‑2‑
1和1
‑2‑
2与工作面发生“粘滞”运动,由于两个驱动足1
‑2‑
1和1
‑2‑
2与工作面的摩擦力不同,利用摩擦力的合力驱动机器人沿x轴正向运动一步;
68.步骤四、重复步骤二至步骤二,可驱动机器人实现沿x轴正向连续步进运动。
69.以上对本发明所提出的一种小型多体节压电机器人及其激励方法,进行了详细介绍,对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1