一种莲蓬自动采摘装置
本发明涉及莲蓬采摘装备领域,特别是一种莲蓬自动采摘装置。
背景技术:
1、莲子含多种对人体有益的元素,具有较高的营养价值和药用价值,是我国南部省份重要的经济作物。每年的六至九月份,是莲子成熟的季节。莲子成熟后,莲农必须下田采摘莲蓬,然后再进行莲子加工,莲蓬采摘是莲子生产过程中的重要工作。由于受技术的限制,自古以来,莲蓬采摘一直为人工作业,莲蓬人工采摘工作环境恶劣、生产效率低、劳动强度大,已成为制约莲子产业发展的瓶颈问题。因此,发明高效自动莲蓬采摘机器来替代人工,是传统产业技术升级的迫切要求。
2、为了克服莲蓬人工采摘的不足,研究者提出了一些莲蓬采摘设备的方案,通过设计特殊的采摘设备,辅助人工实现莲蓬的采摘。例如专利文件cn 210868806 u公开了一种莲蓬采摘器。包括套管、收集罩、收割刀、拉绳、弹性件和固定杆,收集罩设在套管的一端,且设有u形开口;固定杆穿在套管上限位孔两端,弹性件设在套管上,且与固定杆接触;收割刀刀柄上设有通孔,固定杆穿过刀柄,刀片位于u形开口的右侧;拉绳一端与固定杆连接,另一端延伸出套管。本装置拉动拉绳,实现收割刀切断莲蓬的目的。专利文件cn 109691298 a提供一种方便实用的采莲器,包括伸缩杆、支撑架、伸缩辅助杆和智能处理系统,所述伸缩杆包括碳化纤维管一、碳化纤维管二、碳化纤维管三、碳化纤维管四和碳化纤维管五,所述碳化纤维管一套设在碳化纤维管二的一端,所述碳化纤维管二的另一端套设在碳化纤维管三的一端,所述碳化纤维管三的另一端套设在碳化纤维管四的一端,所述碳化纤维管四的另一端套设在碳化纤维管五的一端,所述碳化纤维管一的另一端固定安装有蓄电池,所述碳化纤维管一具有蓄电池的一端的顶部固定安装有收线轮,所述收线轮上设置有锁紧旋钮一,该方便实用的采莲器设计合理,使用方便,能够有效的提高莲蓬采摘的效率。上述技术方案需要人手持设备进行采摘,对人工依赖性依然较大,采摘效率不高。
3、专利文件cn 113079824 a提供了一种水上采摘设备,包括壳体,机械臂结构,定位检测结构,动力装置,其中,壳体内形成有容纳腔,机械臂结构包括设于容纳腔内的机械臂座、机械爪,机械爪与机械臂座相连接,且具有自容纳腔内伸至壳体外侧的活动行程,机械爪用于采摘莲蓬,定位检测结构至少部分位于容纳腔内,具有伸出于容纳腔的探测端,以识别定位壳体周侧的障碍物和采摘物,动力装置设于壳体,以驱动壳体在水上活动,实现自动化,降低人力,提高采摘效率。该方案没有考虑采摘后莲蓬的储存问题,在摘取莲蓬后需要频繁往返,采摘效率较低;另外该方案不具有对莲蓬的识别功能,其应用范围存在一定的局限性。
技术实现思路
1、针对现有技术的不足,本发明提供了一种莲蓬自动采摘装置,该装置可在莲田中自主移动,并可对作业区域中的莲蓬进行识别与采摘,可有效替代人工采摘作业,提高采摘效率。
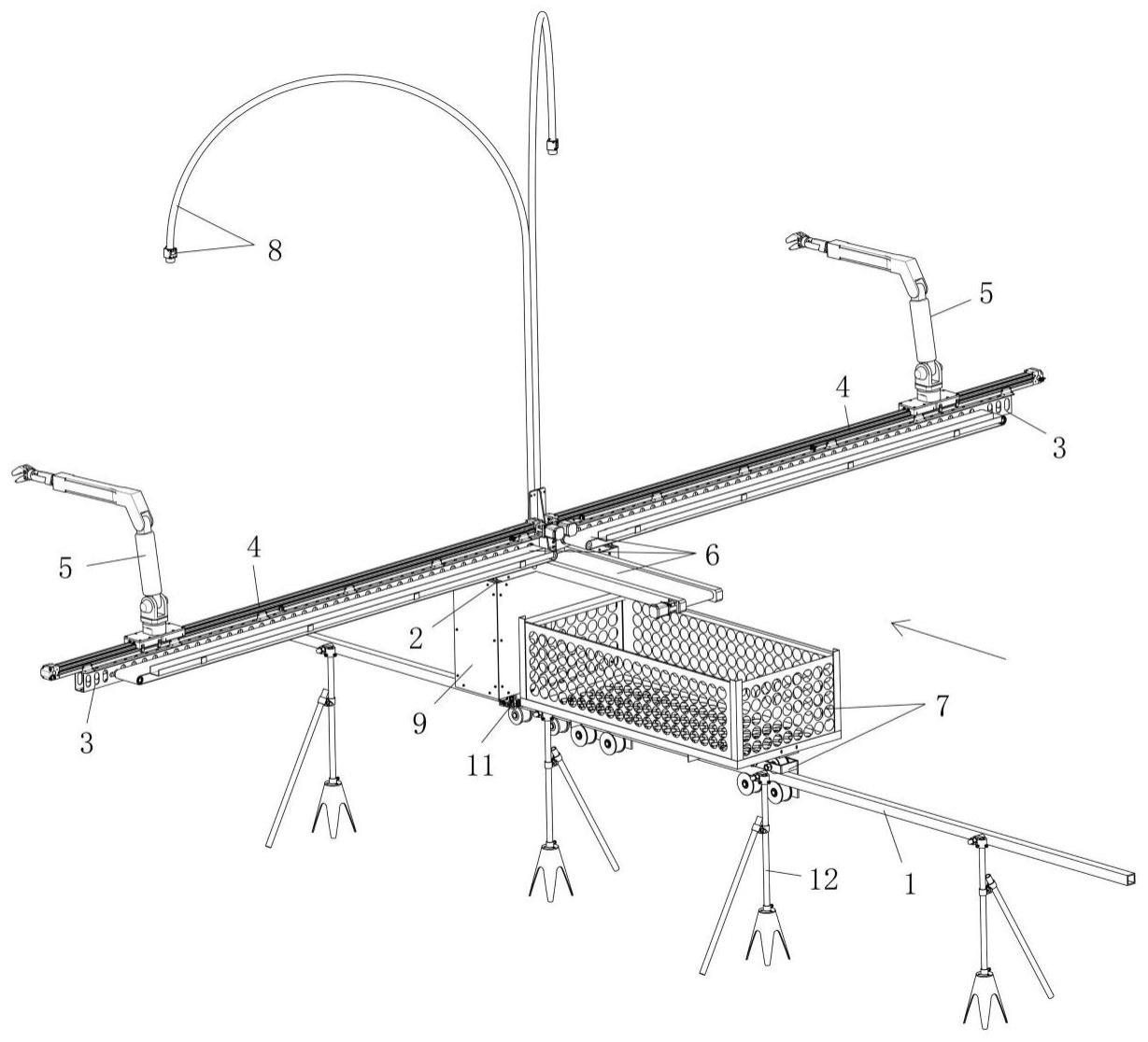
2、本发明所采用的技术方案如下:一种莲蓬自动采摘装置,包括轨道、机架、横梁、工作滑台、采摘机械臂、输送系统、收集系统、图像采集系统和控制系统,其特征在于:所述轨道通过轨道支座固定在莲田中;所述机架底部设置有行走机构,所述行走机构活动安装在行走轨道上;所述横梁设置在机架顶部,并与机架行进方向垂直;所述横梁的两侧各设置有一工作滑台;所述工作滑台上设置有采摘机械臂,所述工作滑台可带动采摘机械臂沿横梁移动;所述收集系统活动设置在轨道上并与机架相连,由机架带动行走;所述输送系统固定设置在横梁一侧,所述输送系统的输出端位于收集系统上集料箱的上方;所述图像采集系统包括相机支架和识别相机,所述相机支架固定安装在机架的顶部,所述相机支架上部分别向左右两侧分叉,所述相机支架两侧分叉的端部各安装有一台识别相机,所述识别相机向下观测采摘区域;所述控制系统与所述莲蓬自动采摘装置各个部分之间通过电信号相连,并经远程通讯模块与远程控制装置相连;
3、所述机架在轨道上移动一定距离后,图像采集系统采集当前采摘区域内的图像,并经控制系统处理识别图像中的莲蓬,并获取莲蓬的位置信息;所述采摘机械臂根据目标莲蓬位置信息执行采摘,采摘后的莲蓬被采摘机械臂置于输送系统中,随后由输送系统送往收集系统;在完成当前采摘区域的采摘后,所述机架再次向前移动一定距离。
4、作为优选,所述横梁包括左横梁、右横梁以及承托梁;承托梁固定设置在机架的顶部;左横梁和右横梁呈对称设置在承托梁上,并分别位于机架的左右两侧;左横梁和右横梁上均独立设置有工作滑台。
5、作为优选,所述横梁上设置有平移电机、平移滑轨,所述工作滑台活动安装在平移滑轨上;所述平移电机固定设置在平移滑轨的端部;所述平移电机通过同步带传动驱动工作滑台沿横梁水平移动。
6、作为优选,所述采摘机械臂包括底座、第一臂体基座、第一臂体、第二臂体、腕关节、采摘末端执行器;所述底座固定在工作滑台上;所述第一臂体基座与底座上端相连接,可在底座上旋转;所述第一臂体与第一臂体基座铰接;所述第二臂体与第一臂体铰接;所述腕关节与第二臂体铰接,可绕第二臂体轴线旋转;所述采摘末端执行器与腕关节铰接,可绕腕关节端部旋转;所述采摘末端执行器可执行对莲蓬的采摘;以上所述各旋转与铰接处还包括有驱动装置。
7、作为优选,所述轨道支座包括可调立柱、斜撑杆以及防沉降套;可调立柱为套接式伸缩结构,可调立柱的上端与轨道固定连接,可调立柱的下端与防沉降套相连;所述防沉降套为上窄下宽的喇叭状结构;斜撑杆的上端通过连接件与可调立柱的柱身相连,斜撑杆的下端倾斜向下插入莲田中。
8、作为优选,所述行走机构包括基座、驱动轮组件、防倾翻组件;所述驱动轮组件通过驱动轮与支撑轮与轨道的顶面接触连接,驱动行走机构沿轨道移动;所述防倾翻组件包括弹性机构与压轮,所述压轮与轨道的底面接触连接,所述弹性机构通过压轮将行走机构压紧在轨道上,防止所述莲蓬自动采摘装置在轨道上行走时倾覆。
9、作为优选,所述收集系统包括集料箱、行走轮组件;所述行走轮组件位于集料箱底部,所述行走轮组件通过无动力的滚轮和防倾翻轮组与轨道相连,可支承集料箱沿轨道运动。
10、作为优选,所述输送机构包括右回转输送机、左回转输送机以及中部回转输送机;所述右回转输送机与左回转输送机呈对称设置在横梁的左右两侧,并均与横梁相平行;所述中部回转输送机设置在右回转输送机与左回转输送机之间的下方,并且与横梁的侧壁垂直连接;所述右回转输送机与左回转输送机的输送方向均为由横梁的两端输送至横梁的中部,中部回转输送机的输送方向为则由靠近横梁的一端输送至远离横梁的一端;中部回转输送机的出料端位于收集系统的集料箱的上方,其出料端设置有检测集料箱中莲蓬高度的距离传感器。
11、作为优选,所述图像采集系统中的识别相机可以获取视野范围内的rgb信息和深度信息;作为优选,所述识别相机为深度相机。
12、作为优选,所述控制系统包括控制器、驱动器、电池模块、远程通讯模块以及远程控制设备;所述控制器、驱动器、电池模块、远程通讯模块均安装在机架的内部;所述控制系统对机架、采摘机械臂、输送系统、图像采集系统的动作执行及功能实现进行控制。
13、作为优选,所述控制系统是通过深度学习算法识别图像中莲蓬。
14、在现有技术中,莲蓬的采摘一般依赖人工驾船或下田进行采摘,采摘难度以及劳动强度均较大,采摘效率低。部分便携式采摘设备一般也需要人工进行操控,仅能降低部分劳动强度及采摘难度,仍然存在采摘效率低的问题,无法实现自动化。
15、在本发明中,所述莲蓬自动采摘系统包括轨道、机架、横梁、工作滑台、采摘机械臂、输送系统、收集系统、图像采集系统和控制系统。其中,轨道通过轨道支座直接安放在莲田中,其余部件均安装在轨道上。采摘机械臂可通过工作滑台在莲田上方作横向移动(在水平面内垂直于行走轨道轴线方向),扩大了莲蓬采摘区域范围,并且在图像采集系统和控制系统的协同作用下,能够精确实现对目标莲蓬的采摘作业。所述轨道为单轨,安装后不会占用田埂空间。通过适当布置轨道,可使装置用于形状不规则莲田内的莲蓬采摘作业,并且可同时在多个莲田内部署该类装置进行莲蓬采摘,极大地提高了莲蓬的自动化采摘效率。与此同时,由于整个装置是被轨道支撑的,可有效减少设备运动过程对荷叶、荷花的损伤。
16、在本发明中,机架通过行走机构在轨道上按照预设的歩距进行前后移动(所述前后方向为轨道的轴线方向,机架行进的方向为前,反之为后)。机架每行走一个歩距后,控制系统即控制设备开始在该歩距覆盖的范围内进行莲蓬的采摘,采摘完成后,继续控制机架行走至下一个歩距进行新一轮的采摘作业。歩距的设置可实现在莲田的长度方向上,将莲田分割为若各个相同宽度的采摘区域,而工作滑台是实现在任一采摘区域内调节采摘机械臂在横向的精确移动,采摘机械臂可以进行多自由度旋转。通过上述两个机制的协同作用,不仅可实现莲蓬的快速精确采摘,还可有效避免莲蓬的漏摘。
17、在本发明中,行走轨道通过轨道支座安放于莲田中,所述轨道支撑包括可调立柱、斜撑杆、防沉降套以及连接件。可调立柱可根据不同莲田内水及淤泥的深度调节行走轨道的高度,可有效避免采摘过程中对荷叶及荷花的碰损。斜撑杆则是用于辅助支撑可调立柱,提高稳定性。防沉降套为上窄下宽的喇叭状结构,其设置在可调立柱的底部,可增大与莲田底部的接触面积,防止沉降,进一步提高稳定性。
18、在本发明中,横梁包括左横梁、右横梁以及承托梁,承托梁固定在机架的顶部,左横梁、右横梁对称式设置在机架的左右两侧(即在水平面内垂直于行走轨道轴线的横向方向的两侧);左横梁、右横梁可以是一体成型的整体式横梁,也可以分别是由若干个横梁段可拆卸的拼接而成,也就是说,左横梁和右横梁的长度可以事先进行调节,即针对不同宽度的若干莲田,采摘前可根据它们的平均宽度或最小宽度来设置左横梁和右横梁的总长度,进而使得只需一次调节即可适应对该片区若干个莲田内莲蓬的采摘作业,大大提高了采收效率,同时也极大地提高了本发明所述系统的实用性。
19、在本发明中,控制系统包括控制器、驱动器、电池模块、远程通讯模块以及远程控制设备。控制器、驱动器、电池模块、远程通讯模块均设置在机架的内部。电池模块为电池(例如锂电池)用于为控制器供电,控制器通过驱动器控制本系统各个部件(主要是控制各个电机)。控制器通过远程通讯模块与远程控制设备进行信号连接。一般地,控制器可以分为主控制器和运动控制器,主控制器与图像采集系统的识别相机连接,控制识别相机拍摄莲蓬照片,并对照片进行莲蓬成熟度识别以及确定要采摘的莲蓬的位置信息,且主控制器根据莲蓬目标位置信息,经由驱动器控制各个电机动作,如控制工作滑台移动及采摘机械臂各关节的运动,使得采摘末端执行器无障碍地运动到目标莲蓬位置,实施莲蓬采摘作业。进一步地,远程控制设备通过远程通讯模块与控制器实现数据通讯,可远程控制莲蓬采摘智能装备在莲田中实施采摘作业。更为具体地,在本发明中远程控制设备可为遥控器、遥控手柄、手机、平板等手持设备,也包括电脑等网络终端设备。
20、在本发明中,图像采集系统包括相机支架和识别相机,其中:相机支架设置于横梁之上,具体为固定安装于横梁的中部。相机支架的末端设置有识别相机。识别相机的镜头可360度自由旋转(一般为朝下设置)。
21、在本发明中,输送机构包括左回转输送机、右回转输送机以及中部回转输送机。左回转输送机与右回转输送机呈对称设置在横梁的左右两侧,并均与横梁相平行。中部回转输送机设置在回转输送机与右回转输送机之间,并且与横梁的侧壁垂直连接。左回转输送机与右回转输送机将位于行走轨道两侧的采摘机械臂采摘的莲蓬输送至中部回转输送机上,再由中部回转输送机输送至收集系统的集料筐内。一般地,左回转输送机、右回转输送机以及中部回转输送机均为柔性的皮带输送机。
22、与现有技术相比较,本发明的有益技术效果是:
23、1:本发明的莲蓬自动采摘装置通过轨道布设在莲田中进行莲蓬的采摘作业,不占用莲田间的田埂空间,且各个莲田中的采摘系统互不影响,采摘效率高;另外,还可适用于多个地势下任意构形的莲田采摘作业,对地势依赖性低,实用性强。
24、2:本发明的莲蓬自动采摘系统通过控制设备控制识别相机、行走机构、工作滑台以及采摘机械臂等,可实现对莲田内采收区域的全方位覆盖,精确实现莲蓬的识别、定位和采摘自主作业,极大的提高了莲蓬采摘的智能化水平和效率。
25、3:本发明莲蓬自动采摘系统通过长度可调的横梁,提高了系统对不同构形莲田的适应性,同时也进一步扩大了莲蓬的采摘区域,减少了在田间布置轨道的数量,降低了采摘成本。同时还通过轨道支撑,有效解决了莲蓬采摘装备在莲田中行走的问题,不仅占用田间面积小,而且有效避免了采摘装备对荷叶、荷花的损伤。
- 还没有人留言评论。精彩留言会获得点赞!