一种基于五轴机械手的多功能桂花采摘收集装置及方法
1.本发明涉及采花器械领域,尤其涉及桂花采摘装置,具体的说是一种基于五轴机械手的桂花采摘及收集装置。
背景技术:
2.桂花是一种药材,具有化痰止咳、散寒破结的药效,既可以用来治病,还能泡茶做菜,具有很高的营养价值。现有的桂花采摘方式大部分还是人工采摘,采摘难度大且效率低下,还容易使得桂花掉落造成浪费。
3.中国专利公开号为cn107667666a、名称为“一种可调节的桂花采摘装置”的文献中公开的桂花采摘位置,其架体整体呈倾斜结构设计,包括长形槽装置、移动轨道装置、支撑模块、下料板装置、收集袋,槽体前端设置采集结构,包括可变环装置、活动模块、振动式刷片组件和连接装置,使用时,操作者手持架体通过调节主控装置,圈定相应作业范围进行移动式采摘,桂花滑落收集于低端收集袋内,该采摘装置存在的问题是:需要人工手持架体,自由度少,能够做到的采摘方位和角度有限,采摘效率仍然很低。
技术实现要素:
4.本发明的目的是为了解决现有桂花采摘装置需要人工手持、采摘效率低、采摘方位和角度有限的问题,提供一种高效的基于五轴机械手的多功能桂花采摘收集装置,本发明同时提出该桂花采摘收集装置的采摘收集方法。
5.为实现上述目的,本发明一种基于五轴机械手的多功能桂花采摘收集装置采用以下技术方案:其包括能多方位多角度转动的五轴机械手,五轴机械手末端连接采摘头,采摘头包括采摘头壳体和水平布置的第六电机,采摘头壳体上端是敞口,连接于采摘头壳体上的第六电机输出轴同轴心固定连接电动机轴带轮,电动机轴带轮经第一个皮带连接橡胶辊带轮,第二个皮带连接毛刷辊带轮,主动毛刷辊上套接毛刷辊带轮和毛刷辊主动齿轮,毛刷辊主动齿轮与毛刷辊从动齿轮相啮合,从动齿轮套在从动毛刷辊上,主动毛刷辊和从动毛刷辊在采摘头壳体上端敞口位置且在相同水平高度;主动橡胶辊上套接所述的橡胶辊带轮和橡胶辊主动齿轮,橡胶辊主动齿轮与橡胶辊从动齿轮相啮合,橡胶辊从动齿轮固定套在从动橡胶辊上,主动橡胶辊和从动橡胶辊在相同的水平高度;主动橡胶辊、从动橡胶辊在主动毛刷辊、从动毛刷辊的正下方且四者相互平行;采摘头壳体下端经伸缩折叠导管连接下方的花叶分离装置,花叶分离装置的下方是收集装置。
6.进一步地,所述的花叶分离装置具有一个分离装置壳体,分离装置壳体内部设有水平的螺旋杆,连接在分离装置壳体上的第七电机输出轴与螺旋杆同轴相连,分离装置壳体底部是能使桂花通过且枝叶无法通过的过滤网。
7.进一步地,所述的五轴机械手由依次连接的机械手底座、第一关节底座、第一机械臂、第二机械臂和第三机械臂组成,机械手底座上表面中间连接第一关节底座下端,垂直布置第一电机带动第一关节底座绕自身的垂直中心轴旋转,第一关节底座上端连接第一机械
臂首端,连接在第一机械臂首端的第二电机带动第一机械臂旋转,第一机械臂末端连接第二机械臂首端,连接在第二机械臂首端的第三电机带动第二机械臂旋转;第二机械臂末端连接第三机械臂的首端,连接在第二机械臂末端的第四电机带动第三机械臂旋转,第三机械臂的末端通过第五电机和联轴器连接所述的采摘头壳体,带动采摘头旋转;所述的第五电机与所述的第一电机、第四电机在空间正交,所述的第二电机、第三电机和第四电机均水平布置且相互平行。
8.所述的一种基于五轴机械手的多功能桂花采摘收集装置的采摘收集方法的技术方案包括以下步骤:
9.步骤一:第六电机启动,主动毛刷辊和从动毛刷辊同步反向转动,调节五轴机械手,将采摘头调整到待采摘桂花的位置,使得主动毛刷辊和从动毛刷辊正对着桂花和枝叶,将桂花和枝叶卷入其间;
10.步骤二:桂花和枝叶传递至正下方的主动橡胶辊和从动橡胶辊,枝叶与同步反向转动的主动橡胶辊和从动橡胶辊接触并卷入,桂花和枝叶混合物落在采摘头壳体内,再向下经伸缩折叠软管落入花叶分离装置中;
11.步骤三:花叶分离装置通过其中设有的水平的螺旋杆的转动,将体型较大的枝叶推送出去,体型较小的桂花从底部的过滤网滤出后向下落在收集装置中。
12.本发明采用上述技术方案后的有益效果是:
13.1、本发明以五轴机械手为载体,能够根据桂花树枝不同生长情况进行调整,实现对不同方位、角度的桂花进行采摘,并且机械臂的运动迅速灵活。,能够做到精准控制桂花采摘位置,连接桂花收集装置,能够有效分离出采摘物体中的桂花并收集起来,大大提高了桂花的采摘收集效率。
14.2、本发明的采摘头采用双毛刷辊转向机构和橡胶辊转向机构。其中,毛刷材质软而韧性大,转动时兼具鞭打和刷树枝的效果,同时也能适应采摘不同直径树枝的实际工作情况。橡胶辊的材料弹性大、韧性也大,对不同粗细的树枝具有自适应的效果。
15.3、本发明的三个机械手臂使得采摘头位置的调节更加灵活,不仅调节效率高,而且还适用于较为复杂的调节运动。其调节功能主要依靠改变电机的闭合状态以及转向,控制非常简单,因此可以使用简单的遥控装置来控制整个机械手的运作,又或者可以采用电脑编程的手段,将整个操作过程设计成电脑程序,实现自动采集效果。
16.4、本发明采用独立的花叶分离装置,其主体部分采用螺旋杆回转,螺旋杆推动花叶混合物不断翻滚并连续向前运动,体积较小的桂花从过滤网漏出从而实现花叶分离。
17.5、本发明提出的一种基于五轴机械手的多功能桂花采摘及收集装置,采集装置由五轴机械手支撑,能够做到精准控制桂花采摘位置,连接桂花收集装置,能够有效分离出采摘物体中的桂花并收集起来,大大提高了桂花的采摘收集效率。
附图说明
18.以下结合附图和具体实施方式对本发明作进一步详细描述:
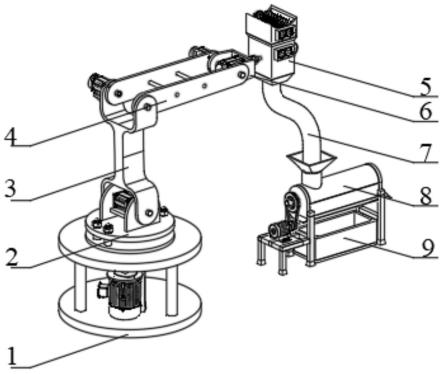
19.图1是本发明一种基于五轴机械手的多功能桂花采摘收集装置的轴测图;
20.图2是图1中的机械手底座1的放大主视图;
21.图3是图2在去掉第一电机1b后的剖视图;
22.图4是图1中的第一关节底座2与第一机械臂3的放大的轴测示意图;
23.图5是图4的爆炸示意图;
24.图6是图1中的第一机械臂3与第二机械臂4的放大的轴测示意图;
25.图7是图6的爆炸图;
26.图8是图1中的第二机械臂4与第三机械臂6的放大的轴测示意图;
27.图9是图8的爆炸示意图;
28.图10是图1中的采摘头5与第三机械臂6的放大的连接主视图;
29.图11是图10的爆炸示意图;
30.图12是图1中的采摘头5的放大的内部轴测图;
31.图13是图1中的花叶分离装置8的放大的轴测图;
32.图14是图13在去掉分离装置上壳体8e后的轴测图。
33.图中:1.机械手底座;1a.底座台;1b.第一电机;1c.底座转向大齿轮;1d.底座转向小齿轮;1e.底座转盘;1f.底座转轴;1g.上轴承;1h.下轴承;2.第一关节底座;2a.第一关节底座转盘;2b.第二电机;2c.键;2d.圆柱凸台;3.第一机械臂;3a.第一机械臂臂体;3b.第三电机;3c.深沟球轴承;3d.键;3e.深沟球轴承;4.第二机械臂;4a.第二机械臂臂体;4b.第四电机;4c.键;4d.圆柱凸台;5.采摘头;5a.第六电机;5b.电动机轴带轮;5c.橡胶辊带轮;5d.毛刷辊带轮;5e.主动毛刷辊;5f.从动毛刷辊;5g.毛刷辊从动齿轮;5h.毛刷辊主动齿轮;5i.橡胶辊从动齿轮;5j.从动橡胶辊;5k.橡胶辊主动齿轮;5l.主动橡胶辊;5m.采摘头壳体;5n.联轴器;5o.键;6.第三机械臂;6a.第五电机;6b.第三机械臂臂体;6c.深沟球轴承;6d.圆柱凸台;7.伸缩折叠导管;8.花叶分离装置;8a.分离装置底座;8b.第七电机;8c.分离装置小带轮;8d.分离装置大带轮;8e.分离装置上壳体;8f.进料口;8g.分离装置下壳体;8h.导向斜坡;8i.螺旋杆;9.收集装置。
具体实施方式
34.为了便于理解,现规定本发明的空间方位,如图1所示,以机械手底座1的位置为“下”,采摘头5的位置方向为“上”。
35.如图1所示,本发明一种基于五轴机械手的多功能桂花采摘收集装置包括能多方位多角度转动的五轴机械手,五轴机械手由依次连接的机械手底座1、第一关节底座2、第一机械臂3、第二机械臂4和第三机械臂6组成,机械手底座1上方是第一关节底座2,连接第一关节底座2下端,第一关节底座2上端连接第一机械臂3的首端,第一机械臂3的末端连接第二机械臂4的首端,第二机械臂4的末端连接第三机械臂6的首端,第三机械臂6的末端也是五轴机械手的末端,五轴机械手的末端与采摘头5相连接。五轴机械手可调节采摘头5的位置和角度,带动采摘头5多方位多角度采摘桂花。
36.采摘头5的下端依次连接伸缩折叠导管7和花叶分离装置8,花叶分离装置8的下方设置收集装置9,采摘头5将采摘的桂花和叶子通过伸缩折叠导管7输送到花叶分离装置8中,花叶分离装置8将桂花和枝叶分离,收集装置9用于收集分离出的桂花。
37.五轴机械手的最下方是机械手底座1,机械手底座1放置在水平面上,机械手底座1的上表面中间连接第一关节底座2,第一关节底座2的中心轴垂直布置,第一关节底座2能绕自身的中心轴作360度旋转。第一关节底座2的上表面中间连接第一机械臂3的首端,第一机
械臂3相对于第一关节底座2能在垂直面上作旋转,第一机械臂3的末端连接第二机械臂4首端,第二机械臂4相对于第一机械臂3能在垂直面上作旋转,第二机械臂4的的末端连接第三机械臂6首端,第三机械臂6相对于第二机械臂4能在垂直面上作旋转。采摘头5与第三机械臂6的末端通过联轴器连接,采摘头5随着第三机械臂6绕第二机械臂4旋转,实现采摘头5的位置调节。
38.伸缩折叠导管7上端位于采摘头5下口与之相连接,下端与花叶分离装置8相连接,收集装置9位于花叶分离装置9的下方并放置在水平面上。采摘头5上端口是敞口,对准需采摘的桂花花叶位置,桂花和枝叶打落进入采摘头5中,通过下方的伸缩折叠导管7输入到花叶分离装置8中,分离出的桂花落到收集装置9中,实现桂花的采摘和收集。
39.结合图2和图3所示的机械手底座1的结构,机械手底座1由底座台1a、第一电机1b、底座转向大齿轮1c、底座转向小齿轮1d、底座转盘1e、底座转轴1f、上轴承1g和下轴承1h组成。底座台1a具有上下两个圆台,两个圆台之间由立柱固定连接,第一电机1b、底座转向大齿轮1c、底座转向小齿轮1d在两个圆台之间,第一电机1b垂直布置,其输出轴向上,第一电机1b的壳体通过电机安装板固定在下圆台上,第一电机1b的输出轴上同轴固定套着底座转向小齿轮1d,底座转向小齿轮1d与底座转向大齿轮1c相啮合,底座转向大齿轮1c同轴固定套在垂直布置的底座转轴1f上,带动底座转轴1f旋转。底座转轴1f在底座台1a的正中间,其下端通过下轴承1h和底座台1a的下圆台连接,其上端通过上轴承1g和底座台1a的上圆台连接。底座转轴1f上端同轴固定连接一个底座转盘1e,底座转盘1e水平布置,用螺母将底座转盘1e与底座转轴1f固定,使得底座转盘1e随底座转轴1f旋转。底座转盘1e在底座台1a的上方,底座转盘1e的上方是第一关节底座2,第一关节底座2固定连接在底座转盘1e上。当第一电机1b工作,由底座转向小齿轮1d传递转矩给底座转轴1f上的转向底座大齿轮1c,使底座转轴1f旋转,从而带动第一关节底座2在水平面上绕底座转轴1f旋转。
40.结合图4和图5所示,第一关节底座2由第一关节底座转盘2a和第二电机2b组成,底座转盘1e上表面固定有四根立柱,其上有螺纹,通过螺母与第一关节底座转盘2a相连,第一关节底座转盘2a和底座转盘1e相平行,都水平布置,并且中心轴共线,通过底座转盘1e带动第一关节底座转盘2a旋转。在第一关节底座转盘2a上端上安装第二电机2b,其壳体固定安装在第一关节底座转盘2a上,第二电机2b的水平布置,其输出轴通过键2c连接第一机械臂臂体3a首端,能带动第一机械臂臂体3a旋转。在第一关节底座转盘2a上端还固定一个水平的圆柱凸台2d,用于安装第一机械臂3。
41.第一机械臂3由第一机械臂臂体3a和第三电机3b组成,第一机械臂臂体3a的首端为倒u形,在倒u形的两个侧壁上开有水平的贯通孔,倒u形侧壁上的其中一个贯通孔通过键2c连接第二电机2b,第二电机2b设在倒u形内,倒u形侧壁的另一个贯通孔中通过深沟球轴承3c连接第一关节底座转盘2a上端的圆柱凸台2d。圆柱凸台2d的中心轴与第二电机2b的输出轴共线。第二电机2b工作时,带动第一机械臂3绕第二电机2b输出轴旋转。
42.第一机械臂臂体3a的末端连接第三电机3b,第三电机3b水平布置,第三电机3b的壳体固定连接在第一机械臂臂体3a的末端,第三电机3b的输出轴伸入第一机械臂臂体3a的末端的对应孔中。
43.结合如图6和图7,第二机械臂4由第二机械臂臂体4a和第四电机4b组成,第二机械臂臂体4a形状类似梯子,中间有两根横杆连接。第一机械臂臂体3a的末端为u形,在u形的两
个侧壁上开有水平的贯通孔,第三电机3b的输出轴伸入第一机械臂臂体3a末端的对应的一个贯通孔中后与第二机械臂臂体4a首端的对应孔通过键3d连接,在键3d的对面,第一机械臂臂体3a末端的另一贯通孔孔与第二机械臂臂体4a首端上的小圆柱凸台4d相连,连接处采用另一个深沟球轴承3e降低滚动摩擦。第三电机3b的输出轴在空间上始终与第二电机2b的输出轴相互平行,与第一电机1b的输出轴相互垂直,使得第二机械臂4绕第一机械臂3沿第三电机3b输出轴旋转。在第二机械臂臂体4a首端连接第四电机4b,第四电机4b的输出轴伸入第二机械臂臂体4a首端的对应孔中。
44.如图8和图9所示,第三机械臂6由第三机械臂臂体6b和第五电机6a组成。第三机械臂臂体6b为u形,在该u形的两个侧壁上开有水平的贯通孔。第四电机4b的输出轴水平布置,伸入第二机械臂臂体4a首端的对应一个贯通孔中,与第三机械臂臂体6b在贯通孔中通过键4c连接。第二机械臂臂体4a上的另一贯通孔与第三机械臂臂体6b上的小圆柱凸台6d相连,连接处采用深沟球轴承6c降低滚动摩擦,且第四电机4b的输出轴在空间上始终与第二电机2b和第三电机3b的输出轴相互平行,与第一电机1b的输出轴相互垂直。使得第三机械臂6绕第二机械臂4沿第四电机4b输出轴旋转。第五电机6a固定在第三机械臂臂体6b的u形中间位置,第五电机6a的输出轴伸出第三机械臂臂体6b的u形底壁中间所开的小孔后连接采摘头5。第五电机6a的输出轴在空间上始终与第二电机2b、第三电机3b、第四电机4b的输出轴相互正交,与第一电机1b的输出轴也相正交。
45.参见图10、图11和图12所示,采摘头5由第六电机5a、电动机轴带轮5b、橡胶辊带轮5c、毛刷辊带轮5d、主动毛刷辊5e、从动毛刷辊5f、毛刷辊从动齿轮5g、毛刷辊主动齿轮5h、橡胶辊从动齿轮5i、从动橡胶辊5j、橡胶辊主动齿轮5k、主动橡胶辊5l和采摘头壳体5m和联轴器5n组成。第五电机6a的输出轴和采摘头壳体5m上的圆柱凸体分别通过键5o与联轴器5n同轴心相连。主动毛刷辊5e和从动毛刷辊5f上是密密的毛刷。
46.采摘头壳体5m的上端是敞口,第六电机5a的壳体通过螺钉安装在采摘头壳体5m上,其输出轴同轴心固定连接电动机轴带轮5b,且第六电机5a的输出轴在空间上始终与第二电机2b、第三电机3b、第四电机4b的输出轴相互平行,与第一电机1b、第五电机6a的输出轴相互垂直。电动机轴带轮5b上有两个皮带,第一个皮带对应连接橡胶辊带轮5c,第二个皮带对应连接毛刷辊带轮5d。电动机轴带轮5b与橡胶辊带轮5c、毛刷辊带轮5d均相互平行。
47.毛刷辊带轮5d同轴心固定套接主动毛刷辊5e,带动主动毛刷辊5e转动。主动毛刷辊5e上固定套有毛刷辊主动齿轮5h,毛刷辊主动齿轮5h与毛刷辊从动齿轮5g相啮合,从动齿轮5g固定套在从动毛刷辊5f上。当主动毛刷辊5e转动时,带动毛刷辊主动齿轮5h、毛刷辊从动齿轮5g以及从动毛刷辊5f转动。主动毛刷辊5e和从动毛刷辊5f在空间位于相同的水平高度,相互平行。
48.橡胶辊带轮5c同轴心固定套接主动橡胶辊5l,主动橡胶辊5l上同轴心固定套有橡胶辊主动齿轮5k,橡胶辊主动齿轮5k与橡胶辊从动齿轮5i相啮合,橡胶辊从动齿轮5i固定套在从动橡胶辊5j上。橡胶辊带轮5c旋转,带动主动橡胶辊5l、橡胶辊主动齿轮5k、橡胶辊从动齿轮5i、从动橡胶辊5j同步旋转。其中,主动橡胶辊5l和从动橡胶辊5j在空间在位于同一水平高度,并且,主动橡胶辊5l、从动橡胶辊5j在主动毛刷辊5e、从动毛刷辊5f的正下方,四者相互平行。主动毛刷辊5e和从动毛刷辊5f在采摘头壳体5m的上端敞口位置,主动毛刷辊5e和从动毛刷辊5f的上方空间无遮挡。
49.当采摘头5工作时,第六电机5a启动,带动电动机轴带轮5b旋转,电动机轴带轮5b通过两个皮带同时带动主动毛刷辊5e、从动毛刷辊5f以及主动橡胶辊5l和从动橡胶辊5j同时旋转。通过五轴机械手的调节,将采摘头5调整到待采摘桂花的位置,使得主动毛刷辊5e和从动毛刷辊5f正对着桂花和枝叶,打落桂花和枝叶,初步将桂花和枝叶卷入其间。主动毛刷辊5e和从动毛刷辊5f同步反向转动,不仅能打落桂花,同时也具有导向作用,将桂花和枝叶传递至正下方的主动橡胶辊5l和从动橡胶辊5j。主动橡胶辊5l和从动橡胶辊5j也同步反向转动,桂花和枝叶与橡胶辊接触并在反向旋转运动的带动下卷入其间。这样,主动毛刷辊5e和从动毛刷辊5f打落的桂花和枝叶混合物落在采摘头壳体5m内,向下再落入与采摘头5下端相连通的伸缩折叠软管7中。当改变橡主动橡胶辊5l和从动橡胶辊5j的转向,可以使桂花和枝叶向上退回,因此,可实现退料功能,按进料、退料、再进料、再退料等如此循环往复,使得采摘过程更加快捷。
50.参见图13和图14所示,花叶分离装置8具有一个分离装置壳体,分离装置壳体由分离装置上壳体8e和分离装置下壳体8g对合而成。分离装置壳体内部设有水平的螺旋杆8i,螺旋杆8i能沿其自身的轴心旋转。分离装置下壳体8g的底壁是过滤网或者是开有的网孔底壁,过滤网或网孔的孔径稍大于桂花的外形尺寸,仅能使桂花通过,但远小于枝叶的尺寸,枝叶不能通过。在分离装置下壳体8g的正下方是放置收集装置9。从分离装置壳体的底壁网孔中落下的桂花被收集装置9收集。分离装置壳体的上端是进料口8f,进料口8f上端与伸缩折叠软管7下端相连通,花叶分离装置8通过进料口8f与伸缩折叠软管7相连接,进料口8f下端与分离装置壳体相通,位于螺旋杆8i一端上方,在螺旋杆8i另一端设有导向斜坡8h,导向斜坡8h与分离装置下壳体8g相连接,相对于分离装置下壳体8g和螺旋杆8i向斜下方倾斜。分离装置下壳体8g下部固定连接在分离装置底座8a上,水平布置的第七电机8b通过螺钉安装在分离装置底座8a上,其输出轴与分离装置小带轮8c同轴固定连接,分离装置小带轮8c通过皮带与分离装置大带轮8d相连接,分离装置大带轮8d同轴固定连接在水平布置的螺旋杆8i上,第七电机8b输出轴与螺旋杆8i相平行。当花叶分离装置8工作时,第七电机8b启动,由分离装置小带轮8c带动分离装置大带轮8d转动,使得螺旋杆8i转动。需分离的花叶混合物沿折叠伸缩导管7从进料口8f进入分离装置壳体内,受重力作用落在分离装置下壳体8g底部的过滤网上,同时,螺旋杆8i推动花叶混合物沿螺旋杆8i的轴向连续向前运动,同时花叶混合物也在不停地翻滚,使得花叶混合物与过滤网充分地接触,将体型较小的桂花从过滤网中过滤出来,向下落入其下方的收集装置9中,其余部分为体型较大的枝叶无法通过过滤网,会在螺旋杆8i的推动下沿导向斜坡8h退出最终被螺旋杆8i推出装置,实现花叶分离。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1