一种蒜瓣筛选及扶正装置的制作方法
1.本技术涉及蒜瓣正反状态检测和调正装置技术领域,尤其涉及一种蒜瓣筛选及扶正装置。
背景技术:
2.本部分的陈述仅仅是提供了与本技术相关的背景技术信息,不必然构成在先技术。
3.申请号201020274476.1,发明名称为大蒜插播机用蒜瓣调头调背下种器的专利文件,公开了一种大蒜插播机用蒜瓣调头调背下种器,包括蒜种箱和逐瓣送种盘构成,逐瓣送种盘卡在蒜种箱的条形口内,在逐瓣送种盘的圆周壁上设有等距排列的取种穴,通过逐瓣送种盘的转动利用取种穴进行蒜瓣的取种,设计巧妙,但是由于取种穴尺寸固定,蒜瓣尺寸并不统一,其适用性相对较小对蒜瓣的要求较高,同时在本公开文件中是利用蒜瓣的重心靠近蒜根的弓背侧,通过将蒜瓣调头调背器的内腔设为球形弧面,使落入蒜瓣调头调背器内的蒜瓣其鳞芽朝上方或朝侧上方,蒜瓣的弓背朝下,使落入蒜瓣调头调背器内的蒜瓣进行了调头和调背,但是该方案存在弊端:蒜瓣落入调头调背器的自由落体时间需要足够长,才可使蒜瓣保持鳞芽朝上方或朝侧上方,或者蒜瓣调头调背器的内腔弧面足够光滑,才能使蒜瓣利用自身重力完成保持鳞芽朝上方或朝侧上方方向的调整,在实际应用中使蒜瓣自由落体时间足够长则会使装置本身体积加大,而蒜瓣调头调背器的内腔弧面由于需要不断的有蒜瓣进入,所以因为磨损或者粉尘等无法长久保持足够光滑。申请号201710594918.7,发明名称为一种用于大蒜种植机的蒜种正反状态检测和调正装置公开了一种用于大蒜种植机的蒜种正反状态检测和调正装置;包括伸缩气缸、旋转气缸、半鸭嘴、弹簧、电磁阀、底板、红外检测器和弯板;鸭嘴安装在旋转气缸推杆上;旋转气缸用于将鸭嘴进行旋转;鸭嘴由两个半鸭嘴通过销轴可活动连接在一起组成;红外检测器安装在鸭嘴一侧的底板上;本发明通过红外检测方式判断蒜种的正反状态,并通过伸缩气缸和旋转气缸组合作用,实现蒜种的翻转,有助于实现大蒜鳞芽朝上种植,保证大蒜“根下头上”种植;但是在该技术方案中,是通过红外检测蒜瓣的蒜种毛须来实现对蒜瓣正反方向的判断,一方面蒜瓣的蒜种毛须长短不一、疏密不一,甚至有的蒜瓣因为运输等原因蒜种毛须已经完全脱落,导致判断不够准确造成“误判”,另一方面通过旋转气缸将鸭嘴翻转时,如果翻转速度比较慢,则有可能在蒜瓣还没有调整好方向的时候蒜瓣已经从鸭嘴中掉落。
4.在上述两个技术方案中,均没有提及在蒜瓣栽种时,处于蒜种箱内的杂物比如灰尘颗粒、蒜皮等的处理方式,在实际应用时会使灰尘颗粒、蒜皮等进入播种机构内,造成使用困难。
5.鉴于此,有必要设计一种具有蒜瓣筛选功能,可以去除蒜瓣中的杂物比如灰尘颗粒、蒜皮、体积小不适合栽种的蒜瓣等;同时蒜瓣正反判断精确、判断过程对蒜瓣伤害小的蒜瓣筛选及扶正装置。
技术实现要素:
6.基于此,针对上述技术问题,本技术提供一种蒜瓣筛选及扶正装置。
7.本技术解决现有技术存在的问题所采用的技术方案是:
8.本技术提出了一种蒜瓣筛选及扶正装置,包括上料机构、输送机构和判断扶正机构,所述上料机构用于将蒜瓣送入输送机构;所述输送机构用于将蒜瓣输送到判断扶正机构,所述判断扶正机构包括设于输送机构上方的判断机构,所述判断机构两侧位于输送机构外侧下方分别设有第一扶正筒、第二扶正筒,所述第一扶正筒外侧和与输送机构固定连接的第一固定板固定连接,所述第二扶正筒与第二固定板和第四支撑架固定连接;所述第一固定板、第二固定板位于判断机构的两侧;所述第一扶正筒和第二扶正筒内部均由上至下连通设置有翻转腔室、下落腔室,两下落腔室汇合连通入汇合腔室,所述第一扶正筒和第二扶正筒末端连通设有播种管;所述第一扶正筒的翻转腔室与第二扶正筒的翻转腔室方向相反;所述第二固定板上固定设有扶正电机,所述扶正电机的电机轴可转动穿过第二固定板后与螺杆的一端轴向固定连接,所述螺杆与判断机构螺纹传动连接,螺杆的另一端穿过判断机构后与第一固定板铰接;
9.所述判断机构包括移动块,所述移动块位于蒜瓣输送的一侧中间底部设有开口,所述开口两侧位于移动块上固定设有入口检测开关,所述开口由外向内在移动块内部形成弧状空间,所述弧状空间的顶部在移动块的另一侧连通设有检测口,所述检测口两侧固定设有出口检测开关,所述入口检测开关、出口检测开关和扶正电机与固定设于第四支撑架上的控制装置电连接。
10.优选地,所述上料机构包括漏斗状结构的料斗,所述料斗下方连通设有筛料盒;所述筛料盒内前后内壁上转动设有筛料辊,所述筛料辊套设于第一传动带内,所述第一传送带的另一侧内套设有提升电机的电机轴,所述提升电机固定设于第三支撑架上并与控制装置电连接,所述第一传送带外均匀设有提升板;所述料斗上设有提升槽,所述第一传动带设于提升槽内。
11.优选地,所述输送机构包括固定设于第三支撑架上的输送电机,所述输送电机的输送电机轴外套设有第二传送带的一端,所述第二传送带的另一端内套设有一端与第四支撑架铰接的输送辊;所述第二传送带上下传送带之间设有承载板,所述承载板一端与第三支撑架固定连接,另一端分别与第一固定板、第二固定板固定连接;所述承载板上位于第二传送带内穿设有输送槽架,所述输送槽架为倒梯形结构,输送槽架底部固定设于承载板上,输送槽架的两端分别设于第二传送带两侧,输送槽架的一端与提升槽固定连接。
12.优选地,所述入口检测开关、出口检测开关均为红外线光栅式光电开关。
13.优选地,所述下落腔室、汇合腔室一次只能容纳一颗蒜瓣竖直下落;所述翻转腔室底部一侧为弧状结构,当蒜瓣横向进入翻转腔室,在蒜瓣自身重力的作用下,横向的蒜瓣发生翻转后竖直进入下落腔室。
14.优选地,所述检测口用于通过蒜瓣的蒜尾以及阻挡蒜瓣的蒜头。
15.优选地,所述料斗位于提升槽的另一端顶部两端分别固定安装于第一支撑架、第二支撑架上方,所述第一支撑架、第二支撑架与第三支撑架、第四支撑架下方均固定安装于底板上。
16.优选地,所述承载板位于第二传送带的外侧下方固定设有起支撑作用的支撑杆,
所述支撑杆底部固定安装于底板上。
17.优选地,所述筛料盒正下方的底板上放置有用于盛放蒜瓣的收纳箱。
18.一种大蒜播种装置,基于一种蒜瓣筛选及扶正装置,底板四周上方固定设有外壳,所述外壳上设有可打开、关闭的门,所述底板下方对称设有行走轮,底板前方固定设有牵引钩;
19.底板位于播种管下方设有通孔,所述播种管穿过通孔后固定设于v型固定架的内侧,所述v型固定架固定设于底板下方,所述v型固定架底部固定设有犁尖。
20.与现有技术相比,本技术的有益效果为:
21.1、利用蒜头2和蒜尾3尺寸的不同,设计可以仅容许蒜尾3通过的检测口3i,通过对射式光栅光电开关进行检测,检测准确度高;
22.2、判断机构3c内的弧形空间,保证了蒜瓣在由第二传送带2c移动到第一扶正筒3f或第二扶正筒3g内时,不会发生前后方向上的变化;
23.3、上料机构筛料盒1b内,筛料盒1b内壁与第一传送带1d之间保留有空间,该空间起到对杂物、蒜皮、尺寸较小的蒜瓣的筛选作用;
24.4、第一传送带1d设于料斗1a内的提升槽1g内,而第一传送带1d上的提升板1e间距又只保留一个蒜瓣的空间,因此在蒜瓣提升过程中,位于提升板1e间的蒜瓣提升过程平稳,不会被其余蒜瓣“挤掉”。
附图说明
25.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
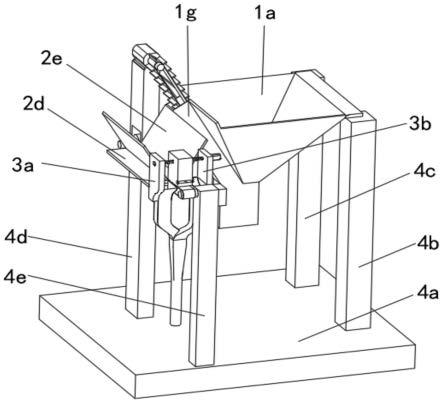
26.图1为本技术的一种蒜瓣筛选及扶正装置整体结构示意图,
27.图2为本技术的一种蒜瓣筛选及扶正装置上料机构结构示意图,
28.图3为图2上料机构的侧视图,
29.图4为本技术的一种蒜瓣筛选及扶正装置输送机构结构示意图,
30.图5为本技术的一种蒜瓣筛选及扶正装置另一角度整体结构示意图,
31.图6为图5中a区域局部放大图,
32.图7为本技术的一种蒜瓣筛选及扶正装置扶正机构结构示意图,
33.图8位本技术的一种蒜瓣筛选及扶正装置第一扶正筒和第二扶正筒连接结构示意图,
34.图9为图8中第一扶正筒和第二扶正筒内部结构示意图,
35.图10为蒜瓣结构示意图,
36.图11为使用本技术的一种蒜瓣筛选及扶正装置的大蒜播种装置整体结构示意图,
37.图12为图11的大蒜播种装置底部结构示意图,
38.图13为图12中c区域局部放大图。
39.图中:
40.1a、料斗,1b、筛料盒,1c、筛料辊,1d、第一传送带,1e、提升板,1f、提升电机,1g、提升槽,
41.2a、输送电机,2b、输送电机轴,2c、第二传送带,2d、承载板,2e、输送槽架,2f、输送
辊,
42.3a、第一固定板,3b、第二固定板,3c、判断机构,3d、扶正电机,3e、螺杆,3f、第一扶正筒,3g、第二扶正筒,3h、出口检测开关,3i,检测口,3j、翻转腔室,3k、下落腔室,3m、汇合腔室,3n、移动块,3p、入口检测开关,
43.4a、底板,4b、第一支撑架,4c、第二支撑架,4d、第三支撑架,4e、第四支撑架,
44.2、蒜头,3、蒜尾,4、蒜瓣,5、控制装置,6、外壳,7、行走轮,8、门,9、牵引钩,10、犁地装置,10a、v型固定架,10b、犁尖,10c、播种管。
具体实施方式:
45.下面结合附图与实施例对本技术作进一步说明。
46.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本公开的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
47.在本公开中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本公开各部件或元件结构关系而确定的关系词,并非特指本公开中任一部件或元件,不能理解为对本公开的限制。
48.如图1为本技术的一种蒜瓣筛选及扶正装置的优选实施例,包括上料机构、输送机构和判断扶正机构,所述上料机构用于将蒜瓣送入输送机构;所述输送机构用于将蒜瓣输送到判断扶正机构,
49.参考图6至图9,所述判断扶正机构包括设于输送机构上方的判断机构3c,所述判断机构3c两侧位于输送机构外侧下方分别设有第一扶正筒3f、第二扶正筒3g,所述第一扶正筒3f外侧和与输送机构固定连接的第一固定板3a固定连接,所述第二扶正筒3g与第二固定板3b和第四支撑架4e固定连接;所述第一固定板3a、第二固定板3b位于判断机构3c的两侧;所述第一扶正筒3f和第二扶正筒3g内部均由由上至下连通设置的翻转腔室3j、下落腔室3k组成,所述两下落腔室3k汇合连通入汇合腔室3m,所述第一扶正筒3f和第二扶正筒3g末端连通设有播种管10c;所述第一扶正筒3f的翻转腔室3j与第二扶正筒3g的翻转腔室3j方向相反;所述下落腔室3k、汇合腔室3m一次只能容纳一颗蒜瓣4竖直下落;所述翻转腔室3j底部一侧为弧状结构,当蒜瓣4横向进入翻转腔室3j,在蒜瓣4自身重力的作用下,横向的蒜瓣4发生翻转后竖直进入下落腔室3k;所述第二固定板3b上固定设有扶正电机3d,所述扶正电机3d的电机轴可转动穿过第二固定板3b后与螺杆3e的一端轴向固定连接,所述螺杆3e与判断机构3c螺纹传动连接,螺杆3e的另一端穿过判断机构3c后与第一固定板3a铰接;
50.所述判断机构3c包括移动块3n,所述移动块3n位于蒜瓣输送的一侧中间底部设有开口,所述开口两侧位于移动块3n上固定设有入口检测开关3p,所述开口由外向内在移动块3n内部形成弧状空间,所述弧状空间的顶部在移动块3n的另一侧连通设有检测口3i,所述检测口3i两侧固定设有出口检测开关3h,所述入口检测开关3p、出口检测开关3h和扶正电机3d与固定设于第四支撑架4e上的控制装置5电连接,所述出口检测开关3h为红外线光栅式光电开关,所述检测口3i用于通过蒜瓣4的蒜尾3以及阻挡蒜瓣4的蒜头2。
51.参考图2至图3,所述上料机构包括漏斗状结构的料斗1a,所述料斗1a下方连通设有筛料盒1b;所述筛料盒1b内前后内壁上转动设有筛料辊1c,所述筛料辊1c套设于第一传动带1d内,所述第一传送带1d的另一侧内套设有提升电机1f的电机轴,所述提升电机1f固定设于第三支撑架4d上并与控制装置4电连接,所述第一传送带1d外均匀设有提升板1e;提升板1e的长度与需要筛选的蒜瓣的长度相等,提升板1e的宽度与需要筛选的蒜瓣的宽度相等,提升板1e的宽度以及相邻两个提升板1e之间的间距满足一次一个提升板1e只能承载一个蒜瓣的要求;所述料斗1a上设有提升槽1g,所述第一传动带1d设于提升槽1g内。
52.参考图4至图5,所述输送机构包括固定设于第三支撑架4d上的输送电机2a,所述输送电机2a的输送电机轴2b外套设有第二传送带2c的一端,所述第二传送带2c的另一端内套设有一端与第四支撑架4e铰接的输送辊2f;第二传送带2c的宽度小于需要筛选的蒜瓣的长度,因此在第二传送带2c上,蒜瓣只能够保持蒜头2或者蒜尾3朝向第二传送带2c的输送方向;所述第二传送带2c上下传送带之间设有承载板2d,所述承载板2d一端与第三支撑架4d固定连接,另一端分别与第一固定板3a、第二固定板3b固定连接;所述承载板2d上位于第二传送带2c内穿设有输送槽架2e,所述输送槽架2e为倒梯形结构,输送槽架2e底部固定设于承载板2d上,输送槽架2e的两端分别设于第二传送带2c两侧,输送槽架2e的一端与提升槽1g固定连接。
53.图1为本技术的一种蒜瓣筛选及扶正装置的整体结构示意图,图中可以看出所述料斗1a位于提升槽1g的另一端顶部两端分别固定安装于第一支撑架4b、第二支撑架4c上方,所述第一支撑架4b、第二支撑架4c与第三支撑架4d、第四支撑架4e下方均固定安装于底板4a上;在本实施例中所述承载板2d位于第二传送带2c的外侧下方固定设有起支撑作用的支撑杆,所述支撑杆底部固定安装于底板4a上,通过各支撑架以及支撑杆,起到对装置的承重稳定作用。
54.在本实施例中,所述筛料盒1b正下方的底板4a上放置有用于盛放蒜瓣4的收纳箱。
55.基于上述的一种蒜瓣筛选及扶正装置,图11至图13示出了一种大蒜播种装置,如图所示,底板4a四周上方固定设有外壳6,所述外壳6上设有可打开、关闭的门8,所述底板4a下方对称设有行走轮7,底板4a前方固定设有牵引钩9;底板4a位于播种管10c下方设有通孔,所述播种管10c穿过通孔后固定设于v型固定架10a的内侧,所述v型固定架10a固定设于底板4a下方,所述v型固定架10a底部固定设有犁尖10b。
56.本技术的一种蒜瓣筛选及扶正装置的工作原理:
57.第一步:上料。
58.首先根据需要,将需要进行蒜瓣筛选和扶正的蒜瓣全部放入料斗1a内,由于料斗1a为漏斗型结构,蒜瓣下落到底部,参考图3,筛料盒1b内,第一传送带1d外的提升板1e与筛料盒1b内壁之间存有间隙,该间隙的尺寸小于需要进行筛选和扶正的蒜瓣的尺寸,当蒜瓣下落的过程中,尺寸较小的蒜瓣、蒜皮、杂物在该所述间隙内落下,位于筛料盒1b下方根据实际需要设置有起收纳或回收作用的收集箱;
59.在本实施例中,提升板1e的长度与需要筛选的蒜瓣的长度相等,提升板1e的宽度以及相邻两个提升板1e之间的间距满足一次一个提升板1e只能承载一个蒜瓣的要求;参考图2和图3,料斗1a侧面内设有提升槽1g,第一传送带1d以及上面的提升板1e位于提升槽1g内。
60.然后通过控制装置5启动提升电机1f,蒜瓣则从料斗1a内由第一传送带1d一个一个输送到料斗1a上方。
61.第二步:蒜瓣输送。
62.接上一步,提升电机1f保持转动,同时控制装置5控制输送电机2a转动,蒜瓣提升到第一传送带1d上方以后掉落到第二传送带2c上,两侧的输送槽架2e起到对蒜瓣的限位作用,使蒜瓣掉落在第二传送带2c上,在本实施例中,第二传送带2c的宽度小于需要筛选的蒜瓣的长度,因此在第二传送带2c上,蒜瓣只能够保持蒜头2或者蒜尾3朝向或者倾斜向第二传送带2c的输送方向;在这个过程中蒜瓣由第二传送带2c输送到判断机构3c下方。
63.第三步:蒜瓣正反判断。
64.接上一步,蒜瓣送到判断机构3c下方以后,参考图6和图7,蒜瓣被送入到移动块3n下方的弧状空间内,入口检测开关3p同时检测到蒜瓣;如果蒜瓣是蒜头2朝向前方,那么由于检测口3i的尺寸仅满足通过蒜尾3,因此蒜头2不会通过检测口3i,则出口检测开关3h不会检测到信号,控制装置5判断蒜瓣为正方向;
65.如果蒜瓣是蒜尾3朝向前方,那么蒜尾3可以通过检测口3i,则出口检测开关3h检测到信号,控制装置5判断蒜瓣为反方向。
66.即:入口检测开关3p检测到蒜瓣后,控制装置5控制输送电机2a继续转动使第二传送带2c继续输送时间t后停止转动,此时若出口检测开关3h检测不到信号,控制装置5判断蒜瓣为正方向;出口检测开关3h检测到信号,控制装置5判断蒜瓣为反方向;
67.时间t的时间根据第二传送带2c的输送速度v以及蒜瓣入口检测开关3p到达检测口3i的距离s来确定,t≥s/v,以保证蒜瓣可以到达检测口3i处;
68.第四步:蒜瓣扶正。
69.接上一步,如果蒜瓣为正方向,参考图6至图9,控制装置5控制扶正电机3d转动设定好的脉冲数mq,使判断机构3c整体移动到第二扶正筒3g的上方,此时由于蒜瓣位于判断机构3c的移动块3n内的弧形空间内,所以蒜瓣会随着判断机构3c的移动而移动到第二扶正筒3g的上方,在第二传送带2c和所述弧形空间的包围之下,蒜瓣不会发生前后方向上的改变,直到其落入第二扶正筒3g内,参考图8和图9,在第二扶正筒3g内的翻转腔室内,蒜瓣发生翻转,使得蒜头2朝下,蒜尾3朝上,然后经下落腔室3k进入汇合腔室3m,最后进入播种管10c;
70.如果蒜瓣为反方向,则控制装置5控制扶正电机3d反向转动设定好的脉冲数nq,使判断机构3c整体移动到第一扶正筒3f的上方,其余控制动作过程与上述情况相似,不做赘述;扶正电机3d转动的脉冲数以扶正电机3d转动到第二扶正筒3g或第一扶正筒3f上方为准,电机转动脉冲数的确定属于本领域技术人员常规手段,不再赘述;然后控制装置5控制扶正电机3d反向转动脉冲数mq或nq,使扶正电机3d复位。
71.第五步:判断、扶正下一个蒜瓣。
72.控制装置5控制输送电机2a继续转动,重复执行第三步和第四步,以此来实现将蒜瓣按照蒜头2朝下、蒜尾3朝上的方向顺序分别由第一扶正筒3f、第二扶正筒3g进入播种管10c。
73.本技术提供的一种大蒜播种装置的工作原理:
74.参考图11至图13,牵引钩9用于绑定在牵引装置上,所述牵引装置为用于实现牵引
功能的拖拉机、电动车等,通过牵引装置拉动大蒜播种装置前进;通过门8可以在筛料盒1b下方放置起收纳或回收作用的收集箱,对杂物进行收集;播种管10c穿过通孔后固定设于v型固定架10a的内侧,所述v型固定架10a固定设于底板4a下方,所述v型固定架10a底部固定设有犁尖10b,当牵引装置牵引本技术提供的大蒜播种装置前进时,犁尖10b将地面犁开后,播种管10c内的蒜瓣落入土壤中。
75.本技术的一种蒜瓣筛选及扶正装置,不仅可以去除蒜瓣中的杂物比如灰尘颗粒、蒜皮、体积小不适合栽种的蒜瓣等;同时蒜瓣正反判断精确、判断过程对蒜瓣伤害小,使用简单方便。
76.以上仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
77.上述虽然结合附图对本技术的具体实施方式进行了描述,但并非对本技术保护范围的限制,所属领域技术人员应该明白,在本技术的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本技术的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1