作业车辆的制作方法
本发明涉及能够进行自动驾驶的插秧机、拖拉机等农业用的作业车辆。
背景技术:
1、以往,已知有在田地中自动地驱动(自动转向)方向盘而在田地上自动行驶的作业车辆(以下,也简称为“车辆”)。
2、例如,在专利文献1中公开了一种作业车辆(插秧机),其一边在田地上直行行驶一边进行农作业时,使用由gnss(global navigation satu system:全球卫星导航系统)接收机取得的车辆的位置信息,以使车辆沿着行驶路径的方式在控制部(控制装置200)的控制下自动地驱动方向盘,由此能够对使车辆笔直地行驶进行辅助。
3、在专利文献1所记载的作业车辆中,即使在田地上转弯时,也能够通过控制部的控制来自动地驱动方向盘。
4、具体而言,如专利文献1的图4所示,在转弯时,通过一边将方向盘自动地打到规定的角度一边行驶而将车辆的朝向设为目标方位角度θ1,之后,将方向盘自动地打回至中立位置(直行的位置)并直行规定的距离。之后,一边将方向盘再次打到规定的角度一边行驶至机体的朝向成为目标方位角度θ2,最后将方向盘自动地打回到中立位置,由此,作业车辆接着直行行驶的同时能够向插植秧苗的行程的位置转弯。以下,将作业车辆直行行驶的同时插植秧苗的各行程称为“插植行程”。
5、这样,无论由gnss接收机取得的位置信息和行驶路径的信息如何,都能够基于方向盘的转向角度和行驶距离,向接下来的插植行程的位置转弯,因此,转弯时不会成为颤抖的动作,能够以顺畅且稳定的动作进行转弯。以下,将自动地驱动方向盘而使作业车辆直行行驶的控制称为“直行控制”,将自动地驱动方向盘而使作业车辆转弯的控制称为“转弯控制”。
6、现有技术文献
7、专利文献
8、专利文献1:日本特开2021-069293
9、然而,在作业车辆中,优选的是,在进行自动驾驶的期间,特别是在无人的状态下作业车辆进行自动驾驶期间能够收纳位于车辆上的小物品、物品(item)。但是,虽然能够在底踏板或座位放置小物品、物品,但便利性不好。
技术实现思路
1、因此,本发明的目的在于,提供一种能够收纳小物品、物品且便利性提高的作业车辆。
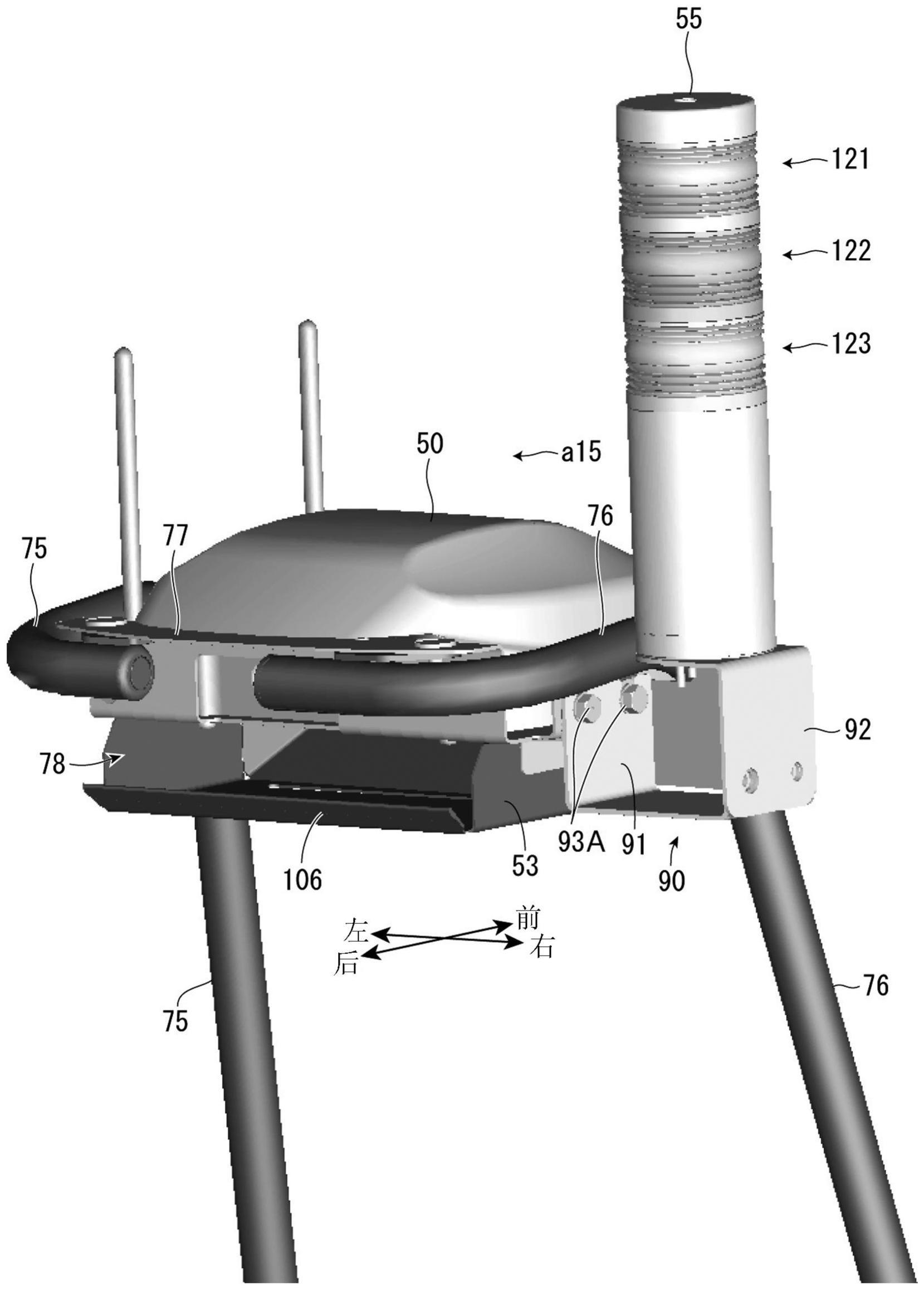
2、本发明的目的是一种作业车辆,其特征在于,所述作业车辆具备:行驶车体2;作业机,其安装于所述行驶车体2;接收天线130,其取得所述行驶车体2的位置信息;框架,其支承所述接收天线130;以及天线罩50,其覆盖所述接收天线130,在所述框架具备收纳部53。
3、根据本发明,能够利用支承接收天线的框架来设置收纳部,收纳物品、小物品,由此便利性提高。
4、在本发明的优选的实施方式中,其特征在于,作业车辆设置有支承部件104,所述支承部件104支承所述接收天线130或所述天线罩50,由所述支承部件104构成所述收纳部53。
5、根据本发明的该优选的实施方式,能够防止水或灰尘侵入收纳部。另外,能够利用支承部件来构成收纳部,收纳物品、小物品,由此便利性提高。
6、在本发明的进一步优选的实施方式中,其特征在于,所述收纳部53位于所述接收天线130的下方。
7、根据本发明的该优选的实施方式,能够防止水或灰尘侵入收纳部。
8、在本发明的优选的实施方式中,其特征在于,在所述收纳部53收纳所述接收天线130的终端等精密仪器或缆线类,在所述精密仪器的下方铺设有弹性体84。
9、根据本发明的该优选的实施方式,能够抑制对收纳于收纳部内的精密仪器的振动传递/冲击传递。
10、根据本发明,能够利用支承接收天线的框架来设置收纳部,收纳物品、小物品,由此便利性提高。
技术特征:
1.一种作业车辆,其特征在于,所述作业车辆具备:
2.根据权利要求1所述的作业车辆,其特征在于,
3.根据权利要求1或2所述的作业车辆,其特征在于,
4.根据权利要求1或2所述的作业车辆,其特征在于,
5.根据权利要求3所述的作业车辆,其特征在于,
技术总结
本发明的目的在于提供一种作业车辆,其能够收纳小物品、物品,便利性提高。作业车辆具备:行驶车体;作业机,其安装于所述行驶车体;接收天线,其取得所述行驶车体的位置信息;框架,支承所述接收天线;以及天线罩,其覆盖所述接收天线,所述作业车辆的特征在于,在所述框架具备收纳部,所述作业车辆设置有支承所述接收天线或所述天线罩的支承部件,由所述支承部件构成所述收纳部。
技术研发人员:飞田秀平,堀田直岐,川上修平,山田佳菜子,铃木悠太,吉田悠未,藤本和之
受保护的技术使用者:井关农机株式会社
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!