一种菠萝加工机器人的制作方法
[0001]
本发明涉及食品加工技术领域,特别涉及一种菠萝加工机器人。
背景技术:
[0002]
菠萝作为常见水果深受人们喜爱,由于菠萝特殊的结构,在削去一层皮之后会出现若干排列规律的黑斑,目前无论是手工削皮还是工厂里批量加工均是调整切深来去除黑斑,这在较大程度上制造了浪费;同时由于菠萝在零售时多数情况下由手工削皮,因此市场上中小型菠萝加工设备较少。
技术实现要素:
[0003]
本发明的目的在于提供一种菠萝加工机器人,以解决上述背景技术中提出的问题。
[0004]
为实现上述目的,本发明提供如下技术方案:一种菠萝加工机器人,包括:支撑装置、上部夹紧切削装置、旋转平台、底部切削装置和中间切削装置,其中,中间切削装置由主运动装置、表皮切除装置与黑斑切除装置构成。
[0005]
进一步地,所述支撑装置由第一支承板、支撑杆、第二支承板、第一支撑座构成,第一支承板与第二支承板之间由若干支撑杆固定连接,若干第一支撑座固定在第二支承板底部。
[0006]
进一步地,所述上部夹紧切削装置由第一电动机、第一夹板、第二夹板、第二电动机、第三电动机、第一齿轮、第一滑杆、第一t形滑槽、第一t形滑块、第一固定杆、第一连接杆、第一切刀、第一螺纹槽、蜗杆、蜗轮、第二螺纹槽、第二固定杆、第一固定架、第二t形滑槽、第二t形滑块、第二齿轮构成,第一夹板、第二夹板一端与第二固定杆、第一固定杆构成活动铰链机构,第二固定杆、第一固定杆固定在第一支承板上,第一夹板、第二夹板另一端与第一螺纹槽、第二螺纹槽活动铰链;第一连接杆与第一t形滑块、第二t形滑块通过轴承连接,第一连接杆与第一螺纹槽通过左旋配合,第一连接杆与第二螺纹槽通过右旋配合,第一连接杆与蜗轮固定连接,蜗轮与蜗杆啮合,蜗杆与第三电动机输出轴同轴连接,第三电动机固定在第一支承板上,第一t形滑块、第二t形滑块分别与第一t形滑槽、第二t形滑槽间隙配合,第一t形滑槽、第二t形滑槽固定在第一支承板上。第一固定架中间固定有第一切刀,其两侧上下表面均设有若干方形凹槽,分别与若干第一滑杆间隙配合,若干第一滑杆分别固定在第一支承板壳体内表面;第一固定架两侧加工出齿形,形成齿条与第一齿轮、第二齿轮啮合,第一齿轮、第二齿轮分别与第二电动机、第一电动机输出轴连接,第二电动机、第一电动机固定在第一支承板上。
[0007]
进一步地,所述旋转平台由上环形槽、下环形槽、第四电动机、第三齿轮、上滑轮、第三支承板、下滑轮、第二连接杆、第四支承板、第四齿轮、导电槽、电刷、固定杆构成,第三支承板、第四支承板通过第二连接杆连接,第三支承板下表面与第四支承板上表面均匀固定有若干上滑轮、下滑轮,若干上滑轮、下滑轮分别在上环形槽、下环形槽内转动;第四齿轮
为第四支承板侧面加工出的齿形,第四齿轮与第三齿轮啮合,第三齿轮固定在第四电动机输出轴上,第四电动机固定在第二支承板上;第三支承板侧面加工有导电槽,导电槽与电刷配合,电刷固定在固定杆上,固定杆固定在第二支承板上。
[0008]
进一步地,所述底部切削装置由第五电动机、第五支承板、第六电动机、第一燕尾槽、第一燕尾滑块、第五齿轮、第一齿条、第二齿条、第六齿轮、第二燕尾滑块、第二燕尾槽、第七电动机、第八电动机、第七齿轮、第二滑杆、第二固定架、第二切刀、第三固定架、第八齿轮构成,第二固定架、第三固定架由第二切刀固定连接,第二固定架、第三固定架上下表面加工有若干方形滑槽与若干第二滑杆间隙配合,第二固定架、第三固定架侧面加工由齿形形成齿条,分别与第七齿轮、第八齿轮啮合,第七齿轮、第八齿轮分别与第五电动机、第八电动机输出轴连接,第五电动机、第八电动机固定在第五支承板上。与上部夹紧切削装置结构类似,若干第二滑杆固定在第五支承板壳体内侧,第六电动机、第七电动机均固定在第五支承板上,第六电动机、第七电动机输出轴分别固定有第五齿轮、第六齿轮,第五齿轮、第六齿轮分别与第一齿条、第二齿条啮合,第一齿条、第二齿条分别固定在第一燕尾槽、第二燕尾槽侧面,第一燕尾槽、第二燕尾槽均固定在第三支承板上,第一燕尾滑块、第二燕尾滑块均固定在第五支承板上,第一燕尾滑块、第二燕尾滑块均与第一燕尾槽、第二燕尾槽间隙配合。
[0009]
进一步地,所述主运动装置由第三连接杆、第一支撑架、角铁、第三燕尾滑块、第九齿轮、第三燕尾滑槽、第九电动机、第一带传动外壳、压力传感器、第二带传动外壳、第一带轮、传动带、第二带轮、控制电路板、摩擦轮、第十三电动机构成,第一支撑架与第三燕尾滑块通过角铁固定连接,第三燕尾滑块与第三燕尾滑槽间隙配合,第三燕尾滑槽固定在第三支承板上,第三燕尾滑块侧面加工轮齿,构成齿条与第九齿轮啮合,第九齿轮与第九电动机输出轴固定连接,第九电动机固定在第三燕尾滑槽侧面;第一带传动外壳、第二带传动外壳通过若干第三连接杆固定在第一支撑架上,压力传感器固定在第一带传动外壳上,控制电路板固定在第二支承板上,第十三电动机输出轴与摩擦轮固定连接,第十三电动机固定在第一支撑架侧面,摩擦轮与传动带摩擦接触。
[0010]
进一步地,所述表皮切除装置由第三支撑座、第五t形滑槽、第二工字形滑块、第六t形滑槽、导向板、第四切刀、第十二电动机、第十三齿轮、第四齿条、摄像头、第五连接杆、第八t形滑槽、第四t形滑块构成,第五t形滑槽、第六t形滑槽均固定在第二带传动外壳侧面,第五t形滑槽、第六t形滑槽与第二工字形滑块两端分别配合,第三支撑座固定在第二工字形滑块侧面,第二工字形滑块上固定有第八t形滑槽,第八t形滑槽与第四t形滑块间隙配合,第四齿条与第四t形滑块固定连接,第四齿条与第十三齿轮啮合,第十三齿轮与第十二电动机输出轴固定连接,第十二电动机侧面固定在第三支撑座侧面,第四t形滑块一端固定有第四切刀,导向板固定在第四切刀上,摄像头固定在第八t形滑槽侧面,第五连接杆一端固定在第三支撑座上,其另一端固定在传动带上。
[0011]
进一步地,所述黑斑切除装置由第二支撑座、第三t形滑槽、第一工字形滑块、第十电动机、第十齿轮、第十一齿轮、传动轴、第三切刀、第四t形滑槽、第三t形滑块、第七t形滑槽、第四连接杆、第三齿条、第十一电动机、第十二齿轮构成,第三t形滑槽、第四t形滑槽均固定在第一带传动外壳侧面,第三t形滑槽、第四t形滑槽与第一工字形滑块两端分别配合,第二支撑座固定在第一工字形滑块侧面,第一工字形滑块上固定有第七t形滑槽,第七t形
滑槽与第三t形滑块间隙配合,第三齿条与第三t形滑块固定连接,第三齿条与第十二齿轮啮合,第十二齿轮与第十一电动机输出轴固定连接,第十一电动机侧面固定在第二支撑座侧面,第三t形滑块一端通过轴承与传动轴连接,传动轴上固定有第十一齿轮,第十一齿轮与第十齿轮啮合,第十齿轮与第十电动机输出轴固定连接,第十电动机固定在第三t形滑块侧面,传动轴上固定有第三切刀,第四连接杆一端固定在第第二支撑座上,其另一端固定在传动带上。
[0012]
本发明具有以下有益效果:体型较小,可减少场地的占用面积;本发明采用全自动加工,有效解放双手;考虑到菠萝特殊结构,在削皮之后还会有若干黑斑,本发明舍弃通过增大切深的方法,以避免过度浪费,而采用对黑斑进行识别定位后定点清除。
附图说明
[0013]
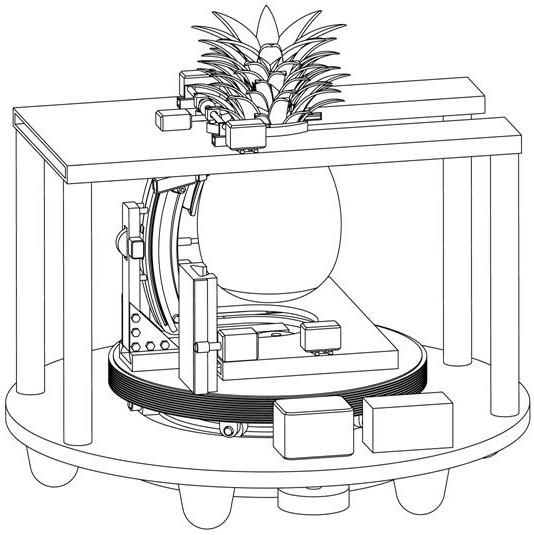
图1为一种菠萝加工机器人装配图。
[0014]
图2为一种菠萝加工机器人支撑装置轴测图。
[0015]
图3为一种菠萝加工机器人上部夹紧装置轴测图。
[0016]
图4为一种菠萝加工机器人上部夹紧切削装置内部结构图。
[0017]
图5为一种菠萝加工机器人旋转平台结构图。
[0018]
图6为一种菠萝加工机器人底部切削装置结构图。
[0019]
图7为一种菠萝加工机器人底部切削装置内部结构图。
[0020]
图8为一种菠萝加工机器人中间切削装置轴测图。
[0021]
图9为一种菠萝加工机器人去皮装置结构图。
[0022]
图10为一种菠萝加工机器人黑斑切除装置结构图。
[0023]
图11为一种菠萝加工机器人表皮切除装置结构图。
[0024]
图12为一种菠萝加工机器人中间切削装置内部结构图。
[0025]
图中:1-第一支承板、2-支撑杆、3-第二支承板、4-上环形槽、5-下环形槽、6-第一支撑座、7-第一电动机、8-第一夹板、9-第二夹板、10-第二电动机、11-第三电动机、12-第一齿轮、13-第一滑杆、14-第一t形滑槽、15-第一t形滑块、16-第一固定杆、17-第一连接杆、18-第一切刀、19-第一螺纹槽、20-蜗杆、21-蜗轮、22-第二螺纹槽、23-第二固定杆、24-第一固定架、25-第二t形滑槽、26-第二t形滑块、27-第二齿轮、28-第四电动机、29-第三齿轮、30-上滑轮、31-第三支承板、32-下滑轮、33-第二连接杆、34-第四支承板、35-第四齿轮、36-导电槽、37-电刷、38-固定杆、39-第五电动机、40-第五支承板、41-第六电动机、42-第一燕尾槽、43-第一燕尾滑块、44-第五齿轮、45-第一齿条、46-第二齿条、47-第六齿轮、48-第二燕尾滑块、49-第二燕尾槽、50-第七电动机、51-第八电动机、52-第七齿轮、53-第二滑杆、54-第二固定架、55-第二切刀、56-第三固定架、57-第八齿轮、58-第三连接杆、59-第一支撑架、60-角铁、61-第三燕尾滑块、62-第九齿轮、63-第三燕尾滑槽、64-第九电动机、65-第二支撑座、66-第三t形滑槽、67-第一工字形滑块、68-第一带传动外壳、69-第十电动机、70-第十齿轮、71-第十一齿轮、72-传动轴、73-第三切刀、74-压力传感器、75-第四t形滑槽、76-第三支撑座、77-第五t形滑槽、78-第二工字形滑块、79-第二带传动外壳、80-第六t形滑槽、81-导向板、82-第四切刀、83-第三t形滑块、84-第七t形滑槽、85-第四连接杆、86-第三齿条、87-第十一电动机、88-第十二齿轮、89-第十二电动机、90-第十三齿轮、91-第四齿条、
92-摄像头、93-第五连接杆、94-第八t形滑槽、95-第四t形滑块、96-第一带轮、97-传动带、98-第二带轮、100-控制电路板、101-摩擦轮、102-第十三电动机。
具体实施方式
[0026]
实施例:一种菠萝加工机器人,包括:支撑装置、上部夹紧切削装置、旋转平台、底部切削装置和中间切削装置,其中,中间切削装置由主运动装置、表皮切除装置与黑斑切除装置构成。
[0027]
支撑装置由第一支承板1、支撑杆2、第二支承板3、第一支撑座6构成,第一支承板1与第二支承板3之间由若干支撑杆2固定连接,若干第一支撑座6固定在第二支承板3底部。
[0028]
上部夹紧切削装置由第一电动机7、第一夹板8、第二夹板9、第二电动机10、第三电动机11、第一齿轮12、第一滑杆13、第一t形滑槽14、第一t形滑块15、第一固定杆16、第一连接杆17、第一切刀18、第一螺纹槽19、蜗杆20、蜗轮21、第二螺纹槽22、第二固定杆23、第一固定架24、第二t形滑槽25、第二t形滑块26、第二齿轮27构成,第一夹板8、第二夹板9一端与第二固定杆23、第一固定杆16构成活动铰链机构,第二固定杆23、第一固定杆16固定在第一支承板1上,第一夹板8、第二夹板9另一端与第一螺纹槽19、第二螺纹槽22活动铰链;第一连接杆17与第一t形滑块15、第二t形滑块26通过轴承连接,第一连接杆17与第一螺纹槽19通过左旋配合,第一连接杆17与第二螺纹槽22通过右旋配合,第一连接杆17与蜗轮21固定连接,蜗轮21与蜗杆20啮合,蜗杆20与第三电动机11输出轴同轴连接,第三电动机11固定在第一支承板1上,第一t形滑块15、第二t形滑块26分别与第一t形滑槽14、第二t形滑槽25间隙配合,第一t形滑槽14、第二t形滑槽25固定在第一支承板1上。第一固定架24中间固定有第一切刀18,其两侧上下表面均设有若干方形凹槽,分别与若干第一滑杆13间隙配合,若干第一滑杆13分别固定在第一支承板1壳体内表面;第一固定架24两侧加工出齿形,形成齿条与第一齿轮12、第二齿轮27啮合,第一齿轮12、第二齿轮27分别与第二电动机10、第一电动机7输出轴连接,第二电动机10、第一电动机7固定在第一支承板1上。
[0029]
旋转平台由上环形槽4、下环形槽5、第四电动机28、第三齿轮29、上滑轮30、第三支承板31、下滑轮32、第二连接杆33、第四支承板34、第四齿轮35、导电槽36、电刷37、固定杆38构成,第三支承板31、第四支承板34通过第二连接杆33连接,第三支承板31下表面与第四支承板34上表面均匀固定有若干上滑轮30、下滑轮32,若干上滑轮30、下滑轮32分别在上环形槽4、下环形槽5内转动;第四齿轮35为第四支承板34侧面加工出的齿形,第四齿轮35与第三齿轮29啮合,第三齿轮29固定在第四电动机28输出轴上,第四电动机28固定在第二支承板3上;第三支承板31侧面加工有导电槽36,导电槽36与电刷37配合,电刷37固定在固定杆38上,固定杆38固定在第二支承板3上。
[0030]
底部切削装置由第五电动机39、第五支承板40、第六电动机41、第一燕尾槽42、第一燕尾滑块43、第五齿轮44、第一齿条45、第二齿条46、第六齿轮47、第二燕尾滑块48、第二燕尾槽49、第七电动机50、第八电动机51、第七齿轮52、第二滑杆53、第二固定架54、第二切刀55、第三固定架56、第八齿轮57构成,第二固定架54、第三固定架56由第二切刀55固定连接,第二固定架54、第三固定架56上下表面加工有若干方形滑槽与若干第二滑杆53间隙配合,第二固定架54、第三固定架56侧面加工由齿形形成齿条,分别与第七齿轮52、第八齿轮57啮合,第七齿轮52、第八齿轮57分别与第五电动机39、第八电动机51输出轴连接,第五电
动机39、第八电动机51固定在第五支承板40上。与上部夹紧切削装置结构类似,若干第二滑杆53固定在第五支承板40壳体内侧,第六电动机41、第七电动机50均固定在第五支承板40上,第六电动机41、第七电动机50输出轴分别固定有第五齿轮44、第六齿轮47,第五齿轮44、第六齿轮47分别与第一齿条45、第二齿条46啮合,第一齿条45、第二齿条46分别固定在第一燕尾槽42、第二燕尾槽49侧面,第一燕尾槽42、第二燕尾槽49均固定在第三支承板31上,第一燕尾滑块43、第二燕尾滑块48均固定在第五支承板40上,第一燕尾滑块43、第二燕尾滑块48均与第一燕尾槽42、第二燕尾槽49间隙配合。
[0031]
主运动装置由第三连接杆58、第一支撑架59、角铁60、第三燕尾滑块61、第九齿轮62、第三燕尾滑槽63、第九电动机64、第一带传动外壳68、压力传感器74、第二带传动外壳79、第一带轮96、传动带97、第二带轮98、控制电路板100、摩擦轮101、第十三电动机102构成,第一支撑架59与第三燕尾滑块61通过角铁60固定连接,第三燕尾滑块61与第三燕尾滑槽63间隙配合,第三燕尾滑槽63固定在第三支承板31上,第三燕尾滑块61侧面加工轮齿,构成齿条与第九齿轮62啮合,第九齿轮62与第九电动机64输出轴固定连接,第九电动机64固定在第三燕尾滑槽63侧面;第一带传动外壳68、第二带传动外壳79通过若干第三连接杆58固定在第一支撑架59上,压力传感器74固定在第一带传动外壳68上,控制电路板100固定在第二支承板3上,第十三电动机102输出轴与摩擦轮101固定连接,第十三电动机102固定在第一支撑架59侧面,摩擦轮101与传动带97摩擦接触。
[0032]
表皮切除装置由第三支撑座76、第五t形滑槽77、第二工字形滑块78、第六t形滑槽80、导向板81、第四切刀82、第十二电动机89、第十三齿轮90、第四齿条91、摄像头92、第五连接杆93、第八t形滑槽94、第四t形滑块95构成,第五t形滑槽77、第六t形滑槽80均固定在第二带传动外壳79侧面,第五t形滑槽77、第六t形滑槽80与第二工字形滑块78两端分别配合,第三支撑座76固定在第二工字形滑块78侧面,第二工字形滑块78上固定有第八t形滑槽94,第八t形滑槽94与第四t形滑块95间隙配合,第四齿条91与第四t形滑块95固定连接,第四齿条91与第十三齿轮90啮合,第十三齿轮90与第十二电动机89输出轴固定连接,第十二电动机89侧面固定在第三支撑座76侧面,第四t形滑块95一端固定有第四切刀82,导向板81固定在第四切刀82上,摄像头92固定在第八t形滑槽94侧面,第五连接杆93一端固定在第三支撑座76上,其另一端固定在传动带97上。
[0033]
黑斑切除装置由第二支撑座65、第三t形滑槽66、第一工字形滑块67、第十电动机69、第十齿轮70、第十一齿轮71、传动轴72、第三切刀73、第四t形滑槽75、第三t形滑块83、第七t形滑槽84、第四连接杆85、第三齿条86、第十一电动机87、第十二齿轮88构成,第三t形滑槽66、第四t形滑槽75均固定在第一带传动外壳68侧面,第三t形滑槽66、第四t形滑槽75与第一工字形滑块67两端分别配合,第二支撑座65固定在第一工字形滑块67侧面,第一工字形滑块67上固定有第七t形滑槽84,第七t形滑槽84与第三t形滑块83间隙配合,第三齿条86与第三t形滑块83固定连接,第三齿条86与第十二齿轮88啮合,第十二齿轮88与第十一电动机87输出轴固定连接,第十一电动机87侧面固定在第二支撑座65侧面,第三t形滑块83一端通过轴承与传动轴72连接,传动轴72上固定有第十一齿轮71,第十一齿轮71与第十齿轮70啮合,第十齿轮70与第十电动机69输出轴固定连接,第十电动机69固定在第三t形滑块83侧面,传动轴72上固定有第三切刀73,第四连接杆85一端固定在第第二支撑座65上,其另一端固定在传动带97上。
[0034]
本发明工作原理:参照图1,当菠萝放入机器,第三电动机11转动,通过蜗杆20、蜗轮21啮合,第一连接杆17随之转动,通过与第一螺纹槽19、第二螺纹槽22中正反螺纹配合,第一夹板8、第二夹板9绕第二固定杆23、第一固定杆16转动,进而菠萝颈部被夹紧;参照图8,当第九电动机64转动,通过第九齿轮62与第三燕尾滑块61侧面轮齿啮合,进而第三燕尾滑块61会带着与其连接的中间切削装置共同运动;参照图9,在运动时,压力传感器74触碰到菠萝表面,当压力达到阈值时第九电动机64停转,中间切削装置停止运动,此后第九电动机64反转,使得压力传感器74脱离菠萝表皮一定距离,之后第九电动机64停转;参照图5,第四电动机28带动第三齿轮29旋转,由于第三齿轮29与第四齿轮35啮合,第四支承板34转动,进而第三支承板31转动,中间切削装置随之转动;中间切削装置与底部切削装置的供电由导电槽36、电刷37接触实现;参照图9、图11、图12,中间切削装置旋转后第十二电动机89带动第十三齿轮90转动,第十三齿轮90与第四齿条91啮合带动第四t形滑块95沿第八t形滑槽94移动,第四t形滑块95带动导向板81、第四切刀82运动,当第四切刀82接触菠萝表皮时开始切削,摄像头92通过对菠萝拍照进行颜色识别,当识别出颜色为黄色时,第十二电动机89反转,将导向板81、第四切刀82收回一定距离;参照图12,第十三电动机102带动摩擦轮101转动,摩擦轮101带动传动带97转动,进而,带动第三支撑座76运动,第三支撑座76带动第四切刀82向下运动第十二电动机89转动,带动第四切刀82运动接触菠萝表面开始再次切削,如此循环上述动作;在表皮切削后,第十一电动机87开始转动,进而第三t形滑块83带动第三切刀73运动直至接触菠萝表面;摄像头92对切削后的菠萝进行拍照,识别出黑斑位置并由控制电路板100通过控制第三支承板31转动、传动带97转动来控制第三切刀73的位置,第三齿条86运动控制第三切刀73切深;参照图1、图6,当黑斑切除后,第六电动机41带动第五齿轮44转动;同时,第七电动机50带动第六齿轮47转动,由齿轮齿条啮合,第五支承板40向上运动,当接触到菠萝底部,第一电动机7、第二电动机10、第五电动机39、第八电动机51开始转动,并带动第一切刀18、第二切刀55运动,同时切除菠萝底部与菠萝颈部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1