一种自动椰肉挖取机
1.本发明涉及一种椰子加工设备,具体涉及一种自动椰肉挖取机。
背景技术:
2.椰子(cocos nucifera l.)是棕榈科椰子属植物,植株高大,乔木状,全球共有90多个国家种植椰子,其中大部分椰子分布在亚洲、非洲和美洲,据统计,2020年全球椰子的收成面积就已经高达1216.88万hm2。早在2000多年前,我国就已经开始种植椰子,如今椰子种植面积最大的省份是海南省,其种植面积占全国总面积98%。椰子由外到内主要由椰衣、椰壳、椰肉、椰子水组成,其各个部分都可以进行加工利用。据统计,我国每年加工的椰子就高达25亿个,其加工产品大约有40多种,比较常见的如:椰子的椰衣纤维、椰壳、椰子肉和椰子水等都能被加工利用。
3.由于椰子具有形状不规则、大小不统一的特点,导致在手工、半自动挖取装置和自动挖取装置挖取椰肉工作过程中始终存在着一些不足,给消费者带来诸多不便。海南是我国椰果的主要产区,椰肉加工也多集中在海南地区,虽经过几十年的发展,但是椰肉挖取方式仍然以原始的手工加工为主。这种手工挖取椰肉的方式存在着挖取的椰肉有效面积小、人工成本高、效率低下,无法满足广大市场的需求等问题。
技术实现要素:
4.本发明是一种高效、清洁、安全的自动椰肉加工设备。该设备的发明,可以使椰肉的挖取由人工操作变为机器操作,不仅可以大大提高生产效率,保证作业卫生,更重要的是能够保证操作人员的人身安全,减少意外事故的发生。同时为企业扩大生产规模,提高经济效益开辟新的途径。
5.本发明解决其技术问题所采用的技术方案是:设有机架,机架的下部设有旋转工作台,旋转工作台的正上方设有椰肉挖取装置。
6.所述旋转工作台设有与机架相连的1号电机,1号电机上设有小齿轮, 小齿轮与大齿轮啮合,大齿轮的正下方设有与机架相连的牛眼轮,大齿轮的中心处还设有阶梯轴,阶梯轴与旋转接头相连,旋转接头与旋转接头定子止动杆相连,旋转接头定子止动杆与机架相连,大齿轮的正上方设有转盘,转盘上设有1号气缸及2号气缸,1号气缸、2号气缸的前端设有机械手。
7.所述椰肉挖取装置设有刀架,刀架的中心设有丝杆,丝杆通过联轴器与2号电机相连,刀架的左侧设有电动推杆,电动推杆与2号滑块相连,2号滑块装于刀架上,2号滑块正下方设有环形压力传感器,环形压力传感器通过压缩弹簧与1号滑块相连,1号滑块的正下方设有2号铰链,2号铰链通过连杆与1号铰链相连,1号铰链的下方设有刀座,刀座上装有1号刀片、2号刀片、3号刀片,刀座与装于刀架上的刀座铰链相连,刀架的右侧设有上限位开关和下限位开关。上限位开关与下限位开关和机架相连,刀架的后侧设有导向滑块,导向滑块可以在与机架相连的滑槽内滑动。
8.首先将椰子切开为两半,然后将其中的一半椰子放置在转盘上的三个长钉上定位,同时启动1号气缸及2号气缸,使1号气缸及2号气缸的活塞杆带动机械手在转盘上的滑槽内滑动,从而使得机械手抱紧椰子。刚开始时刀架与上限位开关相接触,然后2号电机正转,通过联轴器带动丝杆转动,同时由于焊接在刀架上的导向滑块嵌在机架的槽内,因此在螺母的作用下,刀架将往下运动。当刀架运动至下限位开关时,2号电机断电,刀架停止向下运动。刀架连接的电动推杆得电推出,带动2号滑块在刀架的t型槽内向下运动, 2号滑块向下运动的过程中将会压紧压缩弹簧,同时带动1号滑块向下运动,通过2号铰链、连杆及1号铰链的作用,刀座将以刀座铰链为旋转中心进行逆时针转动,进而带动1号刀片、2号刀片、3号刀片同样进行逆时针转动,当环形压力传感器受到的压力值达到指定值时,电动推杆停止运动,3个刀片完成切入椰肉动作,且贴合椰壳内壁。然后1号电机正转,通过齿轮传动带动转盘进而带动椰子旋转,转盘带动椰子转一圈后,2号电机开始反转,这样椰子一边旋转刀架一边缓慢上升,当刀架上升接触到上限位开关时,挖取椰肉工作完成,1号电机和2号电机同时停止工作,电动推杆回位,一个工作周期结束。
9.本发明的有益效果是,使椰肉挖取作业实现了自动化,降低了人工成本,提高了生产效率,为生产企业扩大生产规模奠定了基础;同时减少了意外事故的发生;使椰肉加工高效、清洁、卫生、安全、自动。
附图说明
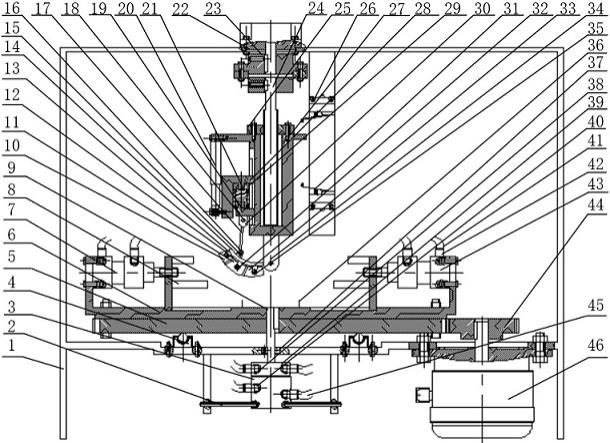
10.图1是本发明实施例工作原理主视图。
11.图2是本发明实施例工作原理左视图。
12.图中,1.机架
ꢀꢀ
2.旋转接头定子止动杆
ꢀꢀ
3.旋转接头
ꢀꢀ
4.牛眼轮
ꢀꢀ
5.大齿轮
ꢀꢀ
6.转盘
ꢀꢀ
7.1号气缸
ꢀꢀ
8.机械手
ꢀꢀ
9.阶梯轴
ꢀꢀ
10.1号刀片
ꢀꢀ
11.2号刀片
ꢀꢀ
12.1号刀片铰链
ꢀꢀ
13.刀片支撑板
ꢀꢀ
14.刀座
ꢀꢀ
15.1号铰链
ꢀꢀ
16.连杆支撑板1 17.连杆
ꢀꢀ
18.2号铰链
ꢀꢀ
19.1号滑块 20.电动推杆
ꢀꢀ
21.压缩弹簧
ꢀꢀ
22.2号电机
ꢀꢀ
23.联轴器
ꢀꢀ
24.丝杆
ꢀꢀ
25.螺母
ꢀꢀ
26.上限位开关
ꢀꢀ
27.刀架
ꢀꢀ
28.2号滑块
ꢀꢀ
29.环形压力传感器
ꢀꢀ
30.连杆支撑板231.下限位开关
ꢀꢀ
32.2号刀片铰链
ꢀꢀ
33.3号刀片
ꢀꢀ
34.刀座铰链
ꢀꢀ
35.3号刀片铰链
ꢀꢀ
36.长钉
ꢀꢀ
37.滚动轴承 38.转子快插接头
ꢀꢀ
39.转子快插接头连接气管
ꢀꢀ
40.定子连接快插接头
ꢀꢀ
41.气缸快插接头气管
ꢀꢀ
42.气缸快插接头
ꢀꢀ
43.2号气缸
ꢀꢀ
44.小齿轮
ꢀꢀ
45.定子连接快插接头气管
ꢀꢀ
46.1号电机
ꢀꢀ
47.导向滑块。
具体实施方式
13.设有机架(1),机架(1)的下部设有旋转工作台,旋转工作台的正上方设有椰肉挖取装置。
14.所述旋转工作台设有与机架(1)相连的1号电机(46),1号电机(46)上设有小齿轮(44), 小齿轮(44)与大齿轮(5)啮合,大齿轮(5)的正下方设有与机架(1)相连的牛眼轮(4),大齿轮(5)的中心处还设有阶梯轴(9),阶梯轴(9)与旋转接头(3)相连,旋转接头(3)与旋转接头定子止动杆(2)相连,旋转接头定子止动杆(2)与机架(1)相连,大齿轮(5)的正上方设有转盘(6),转盘(6)上设有1号气缸(7)及2号气缸(43),1号气缸(7)、2号气缸(43)的前端设有机械手(8)。
15.所述椰肉挖取装置设有刀架(27),刀架(27)的中心设有丝杆(24),丝杆(24)通过联轴器(23)与2号电机(22)相连,刀架(27)的左侧设有电动推杆(20),电动推杆(20)与2号滑块(28)相连,2号滑块(28)装于刀架(27)上,2号滑块(28)正下方设有环形压力传感器(29),环形压力传感器(29)通过压缩弹簧(21)与1号滑块(19)相连,1号滑块(19)的正下方设有2号铰链(18),2号铰链(18)通过连杆(17)与1号铰链(15)相连,1号铰链(15)的下方设有刀座(14),刀座(14)上装有1号刀片(10)、2号刀片(11)、3号刀片(33),刀座(14)与装于刀架(27)上的刀座铰链(34)相连,刀架(27)的右侧设有上限位开关(26)和下限位开关(31)。上限位开关(26)与下限位开关(31)和机架(1)相连,刀架(27)的后侧设有导向滑块(47),导向滑块(47)可以在与机架(1)相连的滑槽内滑动。
16.首先将椰子切开为两半,然后将其中的一半椰子放置在转盘上的三个长钉(36)上定位,同时启动1号气缸(7)及2号气缸(43),使1号气缸(7)及2号气缸(43)的活塞杆带动机械手(8)在转盘(6)上的滑槽内滑动,从而使得机械手(8)抱紧椰子。刚开始时刀架(27)与上限位开关(26)相接触,然后2号电机(22)正转,通过联轴器(23)带动丝杆(24)转动,同时由于焊接在刀架(27)上的导向滑块(47)嵌在机架(1)的槽内,因此在螺母(25)的作用下,刀架(27)将往下运动。当刀架(27)运动至下限位开关(31)时,2号电机(22)断电,刀架(27)停止向下运动。刀架(27)连接的电动推杆(20)得电推出,带动2号滑块(28)在刀架(27)的t型槽内向下运动, 2号滑块(28)向下运动的过程中将会压紧压缩弹簧(21),同时带动1号滑块(19)向下运动,通过2号铰链(18)、连杆(17)及1号铰链(15)的作用,刀座(14)将以刀座铰链(34)为旋转中心进行逆时针转动,进而带动1号刀片(10)、2号刀片(11)、3号刀片(33)同样进行逆时针转动,当环形压力传感器(29)受到的压力值达到指定值时,电动推杆(20)停止运动,3个刀片完成切入椰肉动作,且贴合椰壳内壁。然后1号电机(46)正转,通过齿轮传动带动转盘(6)进而带动椰子旋转,转盘(6)带动椰子转一圈后,2号电机(22)开始反转,这样椰子一边旋转刀架(27)一边缓慢上升,当刀架(27)上升接触到上限位开关(26)时,挖取椰肉工作完成,1号电机(46)和2号电机(22)同时停止工作,电动推杆(20)回位,一个工作周期结束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1